机器人多目标包围问题(MECA)新算法:基于关系图深度强化学习
摘要:中科院自动化所蒲志强教授团队,提出一种基于关系图的深度强化学习方法,应用于多目标避碰包围问题(MECA),使用NOKOV度量动作捕捉系统获取多机器人位置信息,验证了方法的有效性和适应性。研究成果在2022年ICRA大会发表。
在多机器人系统的研究领域中,包围控制是一个重要的课题。其在民用和军事领域都有广泛的应用场景,包括协同护航、捕获敌方目标、侦察监视、无人水面舰艇巡逻狩猎等。
这些应用的核心问题是如何控制一个多机器人系统,涉及多目标分配,同时解决目标包围和避碰子问题。这是一个巨大的挑战,特别是对于分散的多机器人系统。
中科院自动化所蒲志强教授团队在2022年ICRA大会发表论文,提出了一种基于关系图的深度强化学习方法,对各种条件下的多目标避碰包围(MECA)问题具有良好的适应性。
定义任务
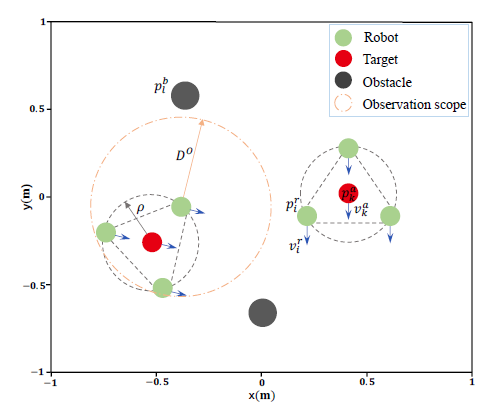
该研究定义了一个MECA任务,即在具有L个静态障碍物(黑色圆圈)的环境中,由N个机器人(绿色圆圈)组成的多机器人系统,协同包围K (1 < K < N)个静止或运动的目标(红色圆圈)。
所有机器人需要自动形成多组,包围所有目标,每组需要形成圆形队形,包围一个独立的目标,同时避免碰撞。这涉及到以下三个子问题:
1) 动态多目标分配与分组
2) 每组分别包围
3) 相互之间避免碰撞
分散式多机器人系统的MECA图解
方法框架
在MECA问题中,存在三种类型的实体,即机器人、目标和障碍物。不同的实体对机器人有不同的影响关系,例如避障、包围目标、与其他机器人合作等。
研究提出了一种基于机器人级和目标级关系图(RGs)的DRL分散方法,命名为MECA-DRL-RG方法。
具体而言:
- 利用图注意网络(GATs)对机器人级RGs进行建模和学习,该RGs由每个机器人与其他机器人、目标和障碍物之间的三个异构关系图组成。
- 利用GAT构建目标级RG,构建机器人与各目标之间的空间关系。目标的运动由目标级RG建模,并通过监督学习进行学习,以预测目标的轨迹。
- 此外,定义了一个知识嵌入式复合奖励函数,解决MECA中的多目标问题。采用基于集中式训练和去中心化执行框架的演员-评论家训练算法对策略网络进行训练。

MECA-DRL-RG方法的整体结构
实验验证
研究团队分别进行了仿真实验和真实环境实验。在真实实验中,情景设置为:6个机器人在有2个障碍物的环境中包围2个移动的目标。机器人的位置和速度数据由NOKOV度量动作捕捉系统提供。
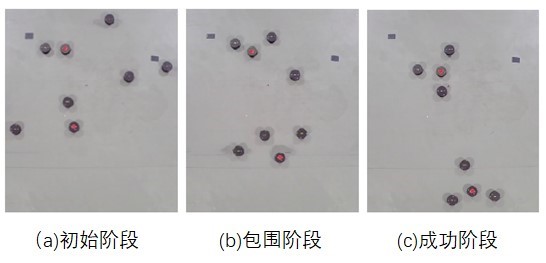
6个机器人在有2个障碍物的环境中包围2个移动目标
仿真实验和真实实验都验证了,相比于其他方法,MECA-DRL-RG方法使机器人能够从周围环境中,学习异构空间关系图,并预测目标的轨迹,从而促进每个机器人对其周围环境的理解和预测。证实了MECA-DRL-RG方法的有效性。
并且,无论机器人、障碍物或目标的数量增加,抑或是目标的移动速度加快,MECA-DRL-RG方法都表现出良好的性能,具有广泛的适应性。
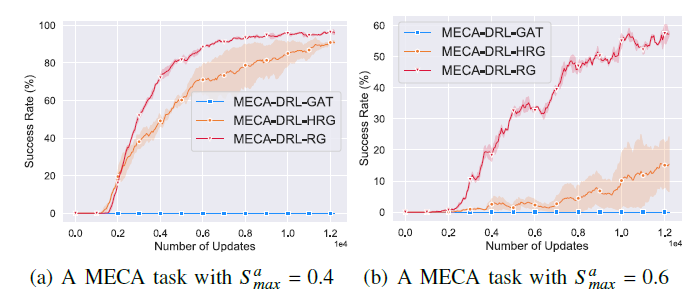
MECA-DRL-RG方法训练曲线
参考文献:
机器人多目标包围问题(MECA)新算法:基于关系图深度强化学习的更多相关文章
- 一文读懂 深度强化学习算法 A3C (Actor-Critic Algorithm)
一文读懂 深度强化学习算法 A3C (Actor-Critic Algorithm) 2017-12-25 16:29:19 对于 A3C 算法感觉自己总是一知半解,现将其梳理一下,记录在此,也 ...
- 论文:利用深度强化学习模型定位新物体(VISUAL SEMANTIC NAVIGATION USING SCENE PRIORS)
这是一篇被ICLR 2019 接收的论文.论文讨论了如何利用场景先验知识 (scene priors)来定位一个新场景(novel scene)中未曾见过的物体(unseen objects).举例来 ...
- 基于深度强化学习(DQN)的迷宫寻路算法
QLearning方法有着明显的局限性,当状态和动作空间是离散的且维数不高时可使用Q-Table存储每个状态动作的Q值,而当状态和动作时高维连续时,该方法便不太适用.可以将Q-Table的更新问题变成 ...
- 【转载】 DeepMind发表Nature子刊新论文:连接多巴胺与元强化学习的新方法
原文地址: baijiahao.baidu.com/s?id=1600509777750939986&wfr=spider&for=pc 机器之心 18-05-15 14:26 - ...
- 【算法总结】强化学习部分基础算法总结(Q-learning DQN PG AC DDPG TD3)
总结回顾一下近期学习的RL算法,并给部分实现算法整理了流程图.贴了代码. 1. value-based 基于价值的算法 基于价值算法是通过对agent所属的environment的状态或者状态动作对进 ...
- 强化学习(五)—— 策略梯度及reinforce算法
1 概述 在该系列上一篇中介绍的基于价值的深度强化学习方法有它自身的缺点,主要有以下三点: 1)基于价值的强化学习无法很好的处理连续空间的动作问题,或者时高维度的离散动作空间,因为通过价值更新策略时是 ...
- 强化学习-Q-Learning算法
1. 前言 Q-Learning算法也是时序差分算法的一种,和我们前面介绍的SARAS不同的是,SARSA算法遵从了交互序列,根据当前的真实行动进行价值估计:Q-Learning算法没有遵循交互序列, ...
- 【目标跟踪】相关滤波算法之MOSSE
简要 2010年David S. Bolme等人在CVPR上发表了<Visual Object Tracking using Adaptive Correlation Filters>一文 ...
- CVPR目标检测与实例分割算法解析:FCOS(2019),Mask R-CNN(2019),PolarMask(2020)
CVPR目标检测与实例分割算法解析:FCOS(2019),Mask R-CNN(2019),PolarMask(2020)1. 目标检测:FCOS(CVPR 2019)目标检测算法FCOS(FCOS: ...
- The game of life(生命游戏)新算法
我写了一种常见的实现算法,和另一种新算法,即不是每次循环计算每个细胞的周围细胞数来产生下一时刻,而是每次每个产生状态变化的细胞主动通知周围的邻居,因此每个细胞增加一个用来记录邻居数的字段.由邻居数决定 ...
随机推荐
- 你还在为SFTP连接超时而困惑么?
1. 前言 在最近的项目联调过程中,发现在连接上游侧SFTP时总是需要等待大约10s+的时间才会出现密码输入界面,这种长时间的等待直接导致的调用文件接口时连接sftp超时问题.于是决定自己针对该问题进 ...
- Kubernetes 漫游:理解 ConfigMap
安装说明 通过 docker desktop 可以安装适用于单机和开发环境单机版的 K8S,如果 docker desktop 无法启动 Kubernates 通过以下方式解决: 一:添加国内镜像源 ...
- 嵌入式linux主机通过分区镜像生成固件,DD备份分区后打包成固件,px30刷机教程 ,rockchip刷机教程
我这边有一个工控路由器因为刷机变砖了,网上下载不到固件,自己暂时还没有搞过编译.我找到了同型号的路由器,把它的系统制作成镜像. 具体操作分为三步: 第一步,直接用DD命令备份了几个分区,分区我暂时还不 ...
- EMCC13.5+Oracle19.13+Redhat8 In Silent Mode
问题描述:使用静默的方式来安装emcc13.5+Oracle19.13,准备好19c的oracle环境,一开始用21c的库+emcc13.5的安装检查一直过不去,但是19c是没有问题的,具体问题会在下 ...
- 文心一言 VS 讯飞星火 VS chatgpt (149)-- 算法导论12.2 4题
五.用go语言,证明:如果一棵二叉搜索树中的一个结点有两个孩子,那么它的后继没有左孩子,它的前驱没有右孩子. 灵捷3.5 . 文心一言: 为了证明这个性质,我们首先需要明确二叉搜索树(BST)的定义和 ...
- 手撸一个SpringBoot配置中心实现配置动态刷新
业务需求 SpringBoot项目配置信息大多使用@Value注解或者@ConfigurationProperties注解读取配置信息,线上项目经常需要对某些配置进行调整,如果每次都需要修改配置文件再 ...
- Java并发(十七)----变量的线程安全分析
1.成员变量和静态变量是否线程安全 如果它们没有共享,则线程安全 如果它们被共享了,根据它们的状态是否能够改变,又分两种情况 如果只有读操作,则线程安全 如果有读写操作,则这段代码是临界区,需要考虑线 ...
- 一文搞定K8S监控告警平台选型
公众号「架构成长指南」,专注于生产实践.云原生.分布式系统.大数据技术分享 前言 最近在搞K8S的监控告警平台选型,对比了目前比较流行两款开源平台kube-prometheus.夜莺,也踩了一些坑分享 ...
- URL路径参数转换器
作用和基本使用 作用: 用于校验请求的路由参数中的值是否符合符合指定的规则. 这个使用方法和django中的路由参数转换器是差不多的. 至于为什么用路径参数转换器,原因和django中的一样,虽然你可 ...
- Oracle数据字典(各种视图、表)
数据字典是存放整个数据库实例重要信息的一组表,这些数据字典大部分都是SYS用户所有. 数据字典的构成 Oracle数据字典名称由前缀和后缀组成,使用下画线"_"连接.其代表的含义如 ...