ORB-SLAM(一)简介
ORB-SLAM是一种基于ORB特征的三维定位与地图构建算法(SLAM)[1]。该算法由Raul Mur-Artal,J. M. M. Montiel和Juan D. Tardos于2015年发表在IEEE Transactions on Robotics。ORB-SLAM基于PTAM架构,增加了地图初始化和闭环检测的功能,优化了关键帧选取和地图构建的方法,在处理速度、追踪效果和地图精度上都取得了不错的效果。要注意ORB-SLAM构建的地图是稀疏的。
ORB-SLAM一开始基于monocular camera,后来扩展到Stereo和RGB-D sensor上。作者好像还会做Semi-dense mapping的扩展。作者的开源代码都在GIT上[2]。
ORB-SLAM算法的一大特点是在所有步骤统一使用图像的ORB特征。ORB特征是一种非常快速的特征提取方法,具有旋转不变性,并可以利用金字塔构建出尺度不变性。使用统一的ORB特征有助于SLAM算法在特征提取与追踪、关键帧选取、三维重建、闭环检测等步骤具有内生的一致性。
ORB-SLAM架构如下:
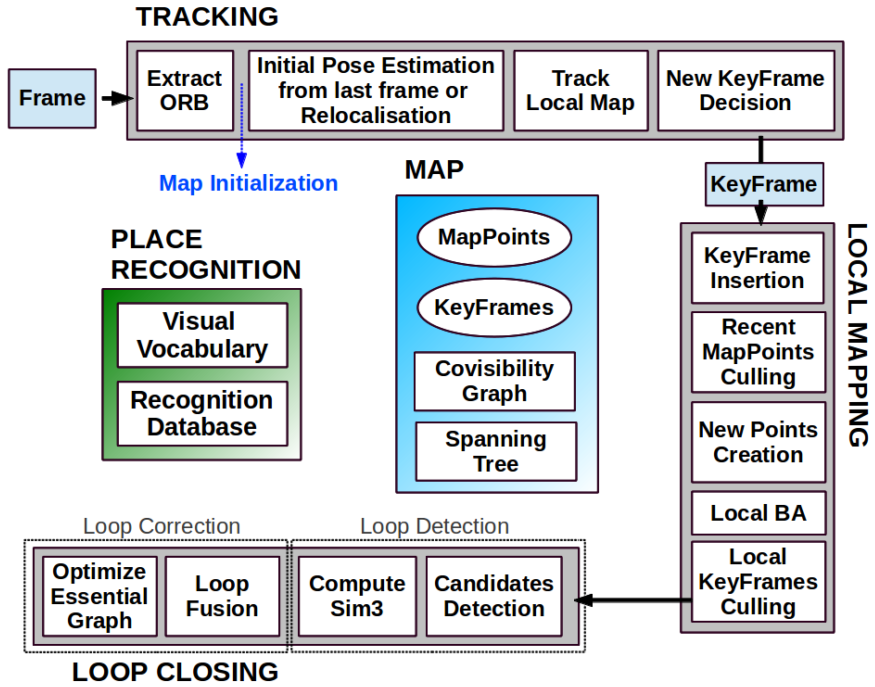
ORB-SLAM利用三个线程分别进行追踪、地图构建和闭环检测。
一、追踪
- ORB特征提取
- 初始姿态估计(速度估计)
- 姿态优化(Track local map,利用邻近的地图点寻找更多的特征匹配,优化姿态)
- 选取关键帧
二、地图构建
- 加入关键帧(更新各种图)
- 验证最近加入的地图点(去除Outlier)
- 生成新的地图点(三角法)
- 局部Bundle adjustment(该关键帧和邻近关键帧,去除Outlier)
- 验证关键帧(去除重复帧)
三、闭环检测
- 选取相似帧(bag of words)
- 检测闭环(计算相似变换(3D<->3D,存在尺度漂移,因此是相似变换),RANSAC计算内点数)
- 融合三维点,更新各种图
- 图优化(传导变换矩阵),更新地图所有点
作者提供了ORB-SLAM在New College Data[3]上的时间统计,如下图。
1. 追踪部分,平均每帧约30毫秒,基本达到了30fps。特征提取速度是非常快的,平均11毫秒左右,非常适合于实时SLAM。姿态估计稍微耗时一些,平均需要20毫秒,特别是姿态优化需要耗费16毫秒的时间。
2. 地图构建部分,平均每关键帧约385毫秒。其中生成新的点约70毫秒,Local BA约300毫秒,相对还是比较耗时的。不知道这两部分还有没有优化的空间。

[1] ORB-SLAM: A Versatile and Accurate Monocular SLAM System
[2] https://github.com/raulmur/ORB_SLAM2
[3] http://www.robots.ox.ac.uk/NewCollegeData/
该系列的其它文章:
ORB-SLAM(一)简介的更多相关文章
- 漫谈 SLAM 技术(上)
欢迎大家前往腾讯云社区,获取更多腾讯海量技术实践干货哦~ 作者:解洪文 导语 随着最近几年机器人.无人机.无人驾驶.VR/AR的火爆,SLAM技术也为大家熟知,被认为是这些领域的关键技术之一.本文对S ...
- [SLAM] 01 "Simultaneous Localization and Mapping" basic knowledge
发信人: leecty (Terry), 信区: ParttimeJobPost标 题: 创业公司招SLAM 算法工程师发信站: 水木社区 (Thu Jun 16 19:18:24 2016), 站内 ...
- [SLAM] 01. "Simultaneous Localization and Mapping"
本篇带你认识SLAM,形成客观的认识和体系 一.通过行业招聘初步了解SLAM 发信人: leecty (Terry), 信区: ParttimeJobPost标 题: 创业公司招SLAM 算法工程师发 ...
- 常用的SLAM解决方案
ORB SLAM 可以去Github上自己搜索现成的SLAM程序包 在此基础上做优化 视觉SLAM的分类方法:按摄像头的多少分为单目和双目,按是否使用概率方法分为概率法和图法 链接 学习SLAM重要的 ...
- 关于ORB SLAM2资源整理(持续更新)
ORB SLAM2源码讲解(吴博) https://www.youtube.com/watch?v=2GVE7FTW7AU 泡泡机器人视频整理: http://space.bilibili.com/3 ...
- 快看,那个学SLAM 的崩溃了!
点"计算机视觉life"关注,置顶更快接收消息! 本文列举了当前优秀SLAM方案,点出了SLAM学习者的困境,最后打算搞点大事 请把此文转发给你认识的SLAM大神,愿你头发浓密,心 ...
- ORB-SLAM2(一)----使用Eclipse进行开发
1.导入项目 准备工作 1, first we should make sure the compile with build.sh under ORB_SLAM2-master is OK. 2, ...
- 2017~ROS暑期学校~分享
http://www.robotics.sei.ecnu.edu.cn/ROS2017/ ---- 往年暑期学校活动:2015年,2016年 报名开始时间7月2日晚10点:暑期学校报名,机器人挑战赛报 ...
- SLAM+语音机器人DIY系列:(一)Linux基础——1.Linux简介
摘要 由于机器人SLAM.自动导航.语音交互这一系列算法都在机器人操作系统ROS中有很好的支持,所以后续的章节中都会使用ROS来组织构建代码:而ROS又是安装在Linux发行版ubuntu系统之上的, ...
- SLAM中的EKF,UKF,PF原理简介
这是我在知乎上问题写的答案,修改了一下排版,转到博客里. 原问题: 能否简单并且易懂地介绍一下多个基于滤波方法的SLAM算法原理? 目前SLAM后端都开始用优化的方法来做,题主想要了解一下之前基于 ...
随机推荐
- RoundedBitmapDrawable生成圆角图片
Bitmap src = BitmapFactory.decodeResource(getResources(), imageId); //获取Bitmap图片 RoundedBitmapDrawab ...
- iOS FFmpeg 优秀博客(资源)集锦
iOS FFmpeg 优秀博客(资源)集锦 这篇博客没有我自己写的内容: 主要是对FFmpeg一些优秀博客的记录 随时更新 1>iOS编译FFmpeg,kxmovie实现视频播放 2>视音 ...
- sun.misc.Unsafe的理解
以下sun.misc.Unsafe源码和demo基于jdk1.7: 最近在看J.U.C里的源码,很多都用到了sun.misc.Unsafe这个类,一知半解,看起来总感觉有点不尽兴,所以打算对Unsaf ...
- 查看mysql数据库版本方法总结
当你接手某个mysql数据库管理时,首先你需要查看维护的mysql数据库版本:当开发人员问你mysql数据库版本时,而恰好你又遗忘了,那么此时也需要去查看mysql数据库的版本............ ...
- ZooKeeper:Quick Start
下载.安装与配置 下载地址 安装 配置 ZooKeeper bin目录下脚本说明 Server 启动.停止 客户端操作 使用简易客户端访问 使用Java客户端访问 使用开源客户端ZkClient访问 ...
- React 性能优化总结
初学者对React可能满怀期待,觉得React可能完爆其它一切框架,甚至不切实际地认为React可能连原生的渲染都能完爆--对框架的狂热确实会出现这样的不切实际的期待.让我们来看看React的官方是怎 ...
- mysql-Federated存储方式,远程表,相当于sql server的linked server
MySQL中针对不同的功能需求提供了不同的存储引擎.所谓的存储引擎也就是MySQL下特定接口的具体实现. FEDERATED是其中一个专门针对远程数据库的实现.一般情况下在本地数据库中建表会在数据库目 ...
- HTML入门篇
HTML HTML是英文Hyper Text Mark-up Language(超文本标记语言)的缩写,他是一种制作万维网页面标准语言(标记).相当于定义统一的一套规则,大家都来遵守他,这样就可以让浏 ...
- 廖雪峰python教程的第一个疑问
函数的参数一节中提到: def add_end(L = []); L.append('END') return L 正常调用add_end时(也就是有参数传入时): >>> add_ ...
- Java读写文本文件操作
package com.test; import java.io.BufferedReader; import java.io.BufferedWriter; import java.io.File; ...