ORB-SLAM(一)简介
ORB-SLAM是一种基于ORB特征的三维定位与地图构建算法(SLAM)[1]。该算法由Raul Mur-Artal,J. M. M. Montiel和Juan D. Tardos于2015年发表在IEEE Transactions on Robotics。ORB-SLAM基于PTAM架构,增加了地图初始化和闭环检测的功能,优化了关键帧选取和地图构建的方法,在处理速度、追踪效果和地图精度上都取得了不错的效果。要注意ORB-SLAM构建的地图是稀疏的。
ORB-SLAM一开始基于monocular camera,后来扩展到Stereo和RGB-D sensor上。作者好像还会做Semi-dense mapping的扩展。作者的开源代码都在GIT上[2]。
ORB-SLAM算法的一大特点是在所有步骤统一使用图像的ORB特征。ORB特征是一种非常快速的特征提取方法,具有旋转不变性,并可以利用金字塔构建出尺度不变性。使用统一的ORB特征有助于SLAM算法在特征提取与追踪、关键帧选取、三维重建、闭环检测等步骤具有内生的一致性。
ORB-SLAM架构如下:
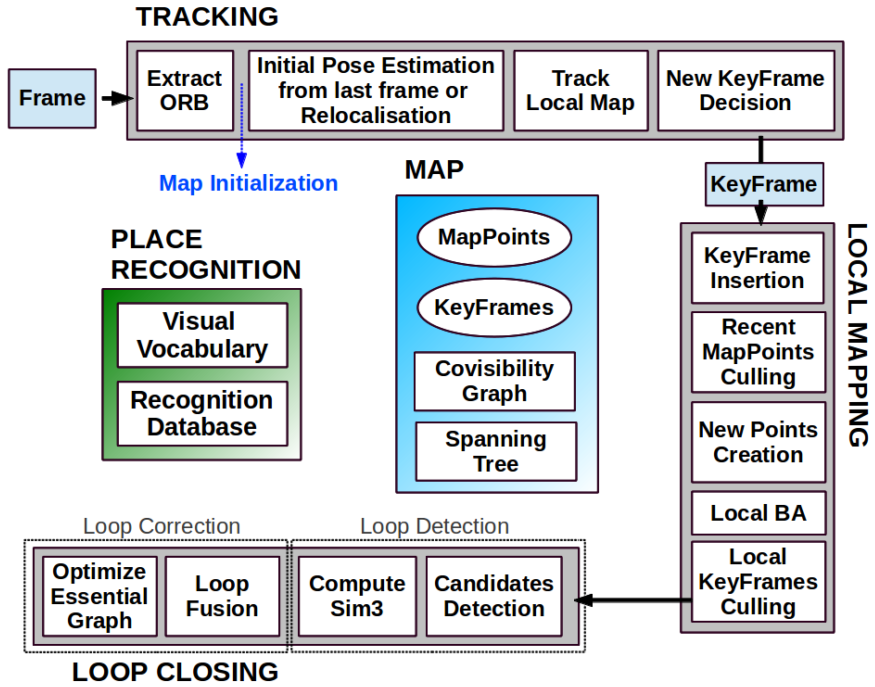
ORB-SLAM利用三个线程分别进行追踪、地图构建和闭环检测。
一、追踪
- ORB特征提取
- 初始姿态估计(速度估计)
- 姿态优化(Track local map,利用邻近的地图点寻找更多的特征匹配,优化姿态)
- 选取关键帧
二、地图构建
- 加入关键帧(更新各种图)
- 验证最近加入的地图点(去除Outlier)
- 生成新的地图点(三角法)
- 局部Bundle adjustment(该关键帧和邻近关键帧,去除Outlier)
- 验证关键帧(去除重复帧)
三、闭环检测
- 选取相似帧(bag of words)
- 检测闭环(计算相似变换(3D<->3D,存在尺度漂移,因此是相似变换),RANSAC计算内点数)
- 融合三维点,更新各种图
- 图优化(传导变换矩阵),更新地图所有点
作者提供了ORB-SLAM在New College Data[3]上的时间统计,如下图。
1. 追踪部分,平均每帧约30毫秒,基本达到了30fps。特征提取速度是非常快的,平均11毫秒左右,非常适合于实时SLAM。姿态估计稍微耗时一些,平均需要20毫秒,特别是姿态优化需要耗费16毫秒的时间。
2. 地图构建部分,平均每关键帧约385毫秒。其中生成新的点约70毫秒,Local BA约300毫秒,相对还是比较耗时的。不知道这两部分还有没有优化的空间。

[1] ORB-SLAM: A Versatile and Accurate Monocular SLAM System
[2] https://github.com/raulmur/ORB_SLAM2
[3] http://www.robots.ox.ac.uk/NewCollegeData/
该系列的其它文章:
ORB-SLAM(一)简介的更多相关文章
- 漫谈 SLAM 技术(上)
欢迎大家前往腾讯云社区,获取更多腾讯海量技术实践干货哦~ 作者:解洪文 导语 随着最近几年机器人.无人机.无人驾驶.VR/AR的火爆,SLAM技术也为大家熟知,被认为是这些领域的关键技术之一.本文对S ...
- [SLAM] 01 "Simultaneous Localization and Mapping" basic knowledge
发信人: leecty (Terry), 信区: ParttimeJobPost标 题: 创业公司招SLAM 算法工程师发信站: 水木社区 (Thu Jun 16 19:18:24 2016), 站内 ...
- [SLAM] 01. "Simultaneous Localization and Mapping"
本篇带你认识SLAM,形成客观的认识和体系 一.通过行业招聘初步了解SLAM 发信人: leecty (Terry), 信区: ParttimeJobPost标 题: 创业公司招SLAM 算法工程师发 ...
- 常用的SLAM解决方案
ORB SLAM 可以去Github上自己搜索现成的SLAM程序包 在此基础上做优化 视觉SLAM的分类方法:按摄像头的多少分为单目和双目,按是否使用概率方法分为概率法和图法 链接 学习SLAM重要的 ...
- 关于ORB SLAM2资源整理(持续更新)
ORB SLAM2源码讲解(吴博) https://www.youtube.com/watch?v=2GVE7FTW7AU 泡泡机器人视频整理: http://space.bilibili.com/3 ...
- 快看,那个学SLAM 的崩溃了!
点"计算机视觉life"关注,置顶更快接收消息! 本文列举了当前优秀SLAM方案,点出了SLAM学习者的困境,最后打算搞点大事 请把此文转发给你认识的SLAM大神,愿你头发浓密,心 ...
- ORB-SLAM2(一)----使用Eclipse进行开发
1.导入项目 准备工作 1, first we should make sure the compile with build.sh under ORB_SLAM2-master is OK. 2, ...
- 2017~ROS暑期学校~分享
http://www.robotics.sei.ecnu.edu.cn/ROS2017/ ---- 往年暑期学校活动:2015年,2016年 报名开始时间7月2日晚10点:暑期学校报名,机器人挑战赛报 ...
- SLAM+语音机器人DIY系列:(一)Linux基础——1.Linux简介
摘要 由于机器人SLAM.自动导航.语音交互这一系列算法都在机器人操作系统ROS中有很好的支持,所以后续的章节中都会使用ROS来组织构建代码:而ROS又是安装在Linux发行版ubuntu系统之上的, ...
- SLAM中的EKF,UKF,PF原理简介
这是我在知乎上问题写的答案,修改了一下排版,转到博客里. 原问题: 能否简单并且易懂地介绍一下多个基于滤波方法的SLAM算法原理? 目前SLAM后端都开始用优化的方法来做,题主想要了解一下之前基于 ...
随机推荐
- OC NSFileHandle(文件内容操作)
OC NSFileHandle(文件内容操作) 初始化 [NSFileHandle fileHandleForUpdatingAtPath:@"data.txt"]; //file ...
- 开发至今,终于开始测试bug,可以省心点了
今天遇到一个特别奇葩的问题 IOSSDK9.1 Xcode7.1.1 使用表控制器UITableViewController来刷新表时, 之前对表的frame进行的修改,都会被恢复,沾满整个屏幕. 目 ...
- Redhat Server 5.7 安装配置PHP
PHP的简介 PHP于1994年由Rasmus Lerdorf创建,刚刚开始是Rasmus Lerdorf 为了要维护个人网页而制作的一个简单的用Perl语言编写的程序.这些工具程序用来显示 Rasm ...
- Flume组件source,channel,sink源码分析
LifeCycleState: IDLE, START, STOP, ERROR [Source]: org.apache.flume.Source 继承LifeCycleAware{stop() + ...
- 不死僵尸木马lpt7.asp.asp与lpt5.cnzzz.asp的删除方法
1. Dos命令 我们知道Windows下是不能以“aux|prn|con|nul|com1|com2|com3|com4|com5|com6|com7|com8|com9|lpt1|lpt2|lpt ...
- js输出二维数组最长的子数组
,,],[,,,],[,,,,]]; ].length; ; i < a.length; i++) { if (max<a[i].length) { max=a[i].length; va ...
- 强大的DOM变化观察者MutationObserver
在这之前 DOM3 提供了 Mutation events 事件 DOMAttrModified DOMAttributeNameChanged DOMCharacterDataModified DO ...
- jsp/servlet 中sendRedirect,include,forward区别
1 sendRedirect response.sendRedirect(); 服务器根据逻辑,发送一个状态码,告诉浏览器重新去请求新的地址,一般来说浏览器会用刚才请求的所有参数重新请求,所以sess ...
- [转]什么鬼,又不知道怎么命名class了
(本文作者Mrcxt,原文链接:http://blog.csdn.net/mrcxt/article/details/52038884) 相信写css的人都会遇到下面的问题: 糟糕,怎么命名这个cla ...
- 参数命令化 防止Sql注入
1.先在数据库中完成储存过程 create proc usp_selectStudent ) as select * froom student where StudentName=@studentN ...