【转】android camera(二):摄像头工作原理、s5PV310 摄像头接口(CAMIF)
关键词:android camera CMM 模组 camera参数 CAMIF
平台信息:
内核:linux
系统:android
平台:S5PV310(samsung exynos 4210)
作者:xubin341719(欢迎转载,请注明作者)
android camera(一):camera模组CMM介绍
android camera(二):摄像头工作原理、s5PV310 摄像头接口(CAMIF)
android camera(三):camera V4L2 FIMC
android camera(四):camera 驱动 GT2005
一、摄像头工作原理
上一篇我们讲了摄像头模组的组成,工作原理,做为一种了解。下面我们析摄像头从寄存器角度是怎么工作的。如何阅读摄像头规格书(针对驱动调节时用到关键参数,以GT2005为例)。
规格书,也就是一个器件所有的说明,精确到器件每一个细节,软件关心的寄存器、硬件关心的电气特性、封装等等。单单驱动方面,我们只看对我们有用的方面就可以了,没必要全部看完。主要这样资料全都是鸟语(En),全部看完一方面时间上会用的比较多,找到关键的地方就行了。
1、camera的总体示意图如下:控制部分为摄像头上电、IIC控制接口,数据输出为摄像头拍摄的图传到主控芯片,所有要有data、行场同步和时钟号。GT2005/GT2015是CMOS接口的图像传感器芯片,可以感知外部的视觉信号并将其转换为数字信号并输出。
我们需要通过MCLK给摄像头提供时钟,RESET是复位线,PWDN在摄像头工作时应该始终为低。PCLK是像素时钟,HREF是行参考信号,VSYNC是场同步信号。一旦给摄像头提供了时钟,并且复位摄像头,摄像头就开始工作了,通过HREF,VSYNC和PCLK同步传输数字图像信号。 数据是通过D0~D7这八根数据线并行送出的。

(1)、Pixel Array
GT2005阵列大小为 1268 列、1248 行,有效像素为 1616 列, 1216 行。也就是说摄像头为1600X1200的时候,像素点要多于这个,去除边缘一部分,保证图像质量吧。
(2)、IIC 这个不用说了,摄像头寄存器初始化的数据都从这里传输的,所有的IIC器件都一样的工作,来张图吧,后面做详细分析;

下面这一部分在调试驱动的过程中比较重要了:
(3)、MCLK
电子元件工作都得要个时钟吧,摄像头要工作,这个就是我们所要的时钟,在主控制芯片提供,这个时钟一定要有,要不然摄像头不会工作的。
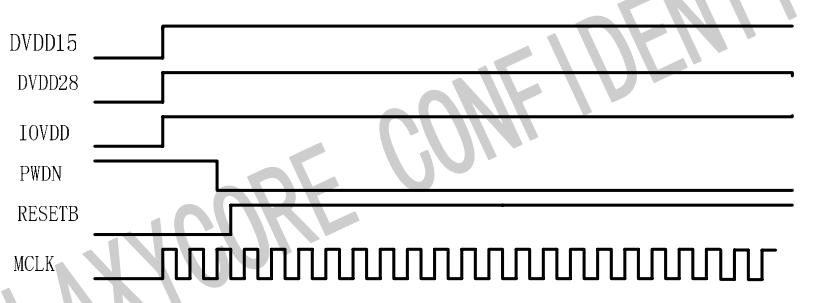
(4)、上下电时序,这个要接规格书上来,注间PWDN、RESETB这两个脚,不同的摄像头不太一样,这个图是上电时序,上电时参考一下,知道在那里看就行;
(5)PCLK \D1~D7
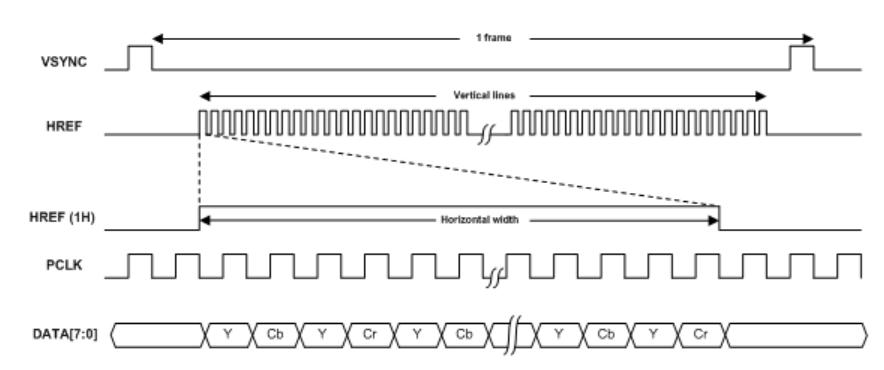
摄像头得到的数据要传出来吧,要有数据,当然数据出来要有时钟和同步信号了,看下它的时序,和LCD显示的时序一样,道理是一样的:
(6)、主要的寄存器:分辨率、YUV顺序、X轴、Y轴镜相、翻转
以上工作完成后,也许还有一些问题,分辨率太小; YUV顺序不对图像不对; XY图像方向。这些工作完成后,如果还有什么细节的问题,如果你想花时间,看规格书里面的寄存器可以解决的,如果不想看,找模组厂的FAE,他们专业的,很快会帮你搞定。
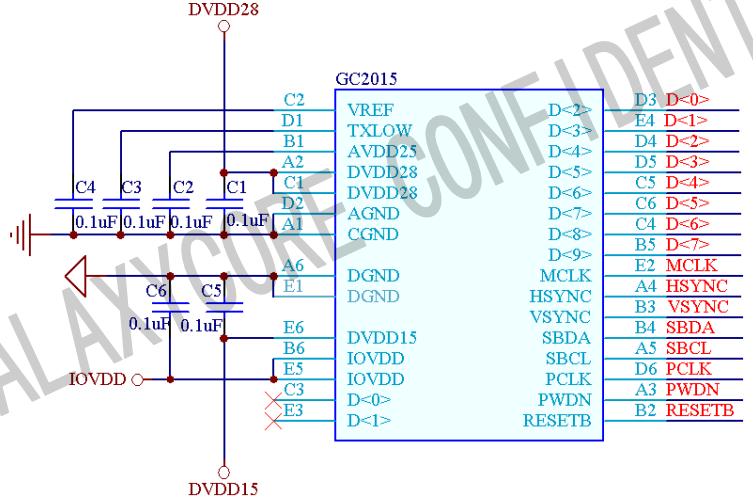
(7)、摄像头的硬件接口
二、S5pv310上Camera主控芯片上的硬件接口
1、CAMIF Camera Interface
先看一下摄像头接口框图:(这个看着有点抽像,我们放这里,先了解一下,其实驱动中一般不会涉及到这里,不过我们这里分析了,就把这个带出来了)
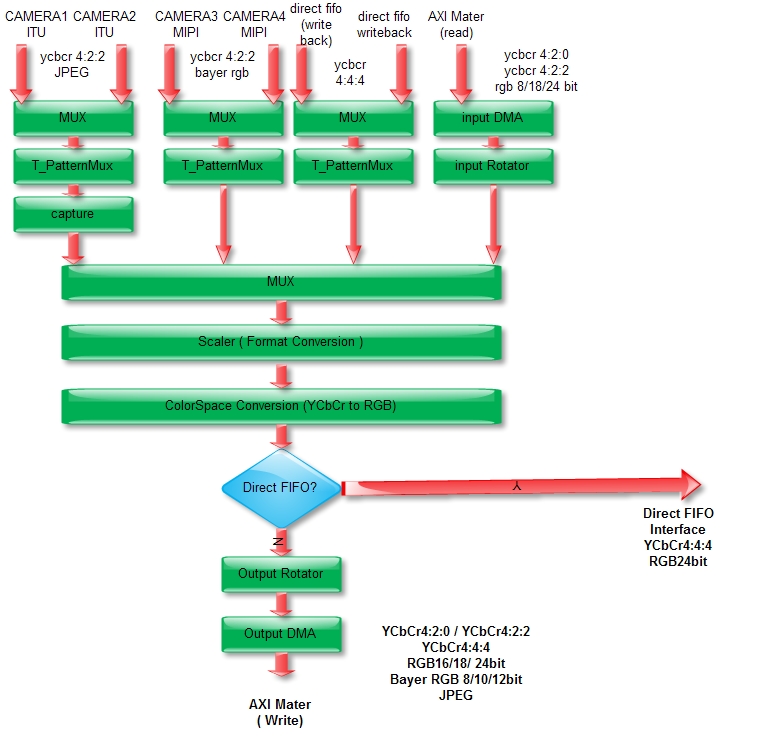
(1)、摄像头接口的主要属性:
a、支持多种输入接口:(就是上面我们看到的四模式)
DMA (AXI 64-bitinterface) 模式;
MIPI (CSI) 模式;
ITU-R BT 601/ 656/ 709模式;
Direct FIFO (PlayBack)模式;
b、支持多种输出模式:
DMA (AXI 64-bitinterface) 模式;
Direct FIFO 模式;
c、支持数码变焦Digital Zoom In (DZI) capability;
d、支持多摄像头输入;
e、 支持视频同步信号极性可编程控制;
f、支持最大输入分辨率为8192X8192;
g、支持图像翻转(X轴、Y轴镜相,90、180、270翻转);
h、支持多种图片格式;
i、支持捕获帧控制;
j、支持的图像特效。
2、FIMC Fully InteractiveMobile Camera
摄像头的采集的数据要CPU无法直接处理,主控芯片里面集成了Camera控制器,叫FIMC(FullyInteractive Mobile Camera)。摄像头需要先把图像数据传给控制器,经过控制器处理(裁剪拉升后直接预览或者编码)之后交给CPU处理。实际上摄像头工作需要的时钟(MCLK)也是FIMC给它提供的。
在s5pv310上的摄像头接口是一个FIMC(完全交互式移动相机接口),支持ITUR BT-601-605标准、AMX接口、MIPI接口
MIPI 、ITU、AMX
(1)、ITU国际电信联盟无线电通信部门ITU-RRadiocommunication Sector of ITU 简称ITU-RITU-R BT.601 16位数据传输;Y、U、V信号同时传输,是并行数据,行场同步单独输出。
ITU-R BT.6568/10位数据传输;不需要同步信号;串行数据传输;传输速率是601的2倍;先传Y,后传UV。行场同步信号嵌入在数据流中。
(2)、MIPI(移动行业处理器接口)是MobileIndustry Processor Interface的缩写 MIPI 规范:Camera工作组:MIPI Camera Serial Interface 1.0specification .Camera Serial Interface 2 v1.0 (CSI-2)
(3)、AMX(Advanced eXtensible Interface)是一种总线协议,该协议是ARM公司提出的AMBA(Advanced Microcontroller BusArchitecture)3.0协议中最重要的部分,是一种面向高性能、高带宽、低延迟的片内总线。
3、接口信息
FIMC信号定义如下所示(YCbCr模式)
|
Signal |
I/O |
Description |
Type |
|
HREF |
I |
行同步信号 |
|
|
PCLK |
I |
像素时钟 |
|
|
DATA[7:0] |
I |
像素数据 |
|
|
FIELD |
O |
FIELD信号 |
|
| MCLK |
O |
系统时钟信号 |
通过CAM_MCLK给摄像头提供时钟,RST是复位线,PWDN在摄像头工作时应该始终为低。HREF是行参考信号,PCLK是像素时钟,VSYNC是场同步信号。一旦给摄像头提供了时钟,并且复位摄像头,摄像头就开始工作了,通过HREF,PCLK和VSYNC同步传输数字图像信号。数据是通过DATA0~DATA7这八根数据线并行送出的。

4、不同接口模式的工作时序
ITU-R BT 656输入时序图,这种方式下同步信号已经内嵌到视频数据中了,因此不需要额外的行和帧同步信号。

ITU-R BT 601输入时序图,这种方式下行和帧同步信号独立于视频数据,因此需要同步信号。
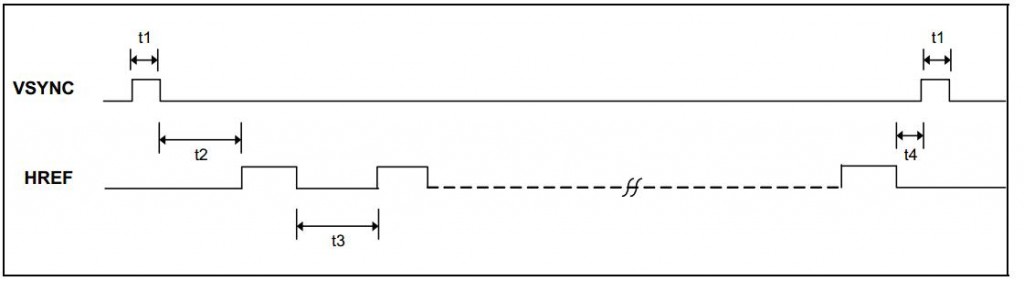
(ITU-R BT 601: 16位数据传输;21芯;Y、U、V信号同时传输。
ITU-R BT 656: 9芯,不需要同步信号;8位数据传输;串行视频传输;传输速率是601的2倍;先传Y,后传UV。)
同步信号的时延参数
Ø t1:表示VSYNC前、后插入周期
Ø t2:表示HREF前插入周期
Ø t3:表示 HREF宽度
Ø t4:表示HREF后插入周期
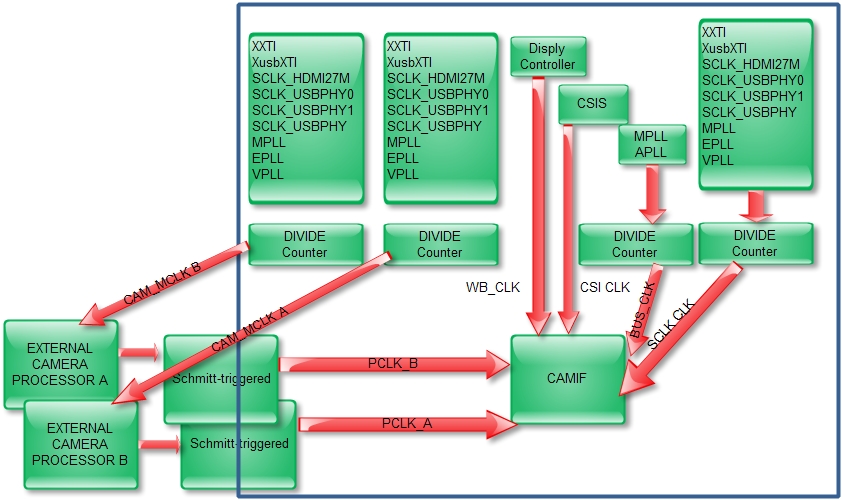
5、camera的时钟域,三个时钟:系统时钟、PCLK、MCLK
每个摄像头接口包括三个时钟域,每一个时钟域是系统总线时钟,第二个是摄像头像素时钟PCLK,第三个时钟域为内部时钟MCLK。系统总线时钟必需高于PCLK, CAM_MCLK 必需固定频率分频,如PLL时钟。如果有外部时钟晶振,CAM_MCLK 空掉。不需要同步MMCLK,PCLK应该与schmitt-triggered电平移位器连接。
6、硬件接口电路
主控芯片上的接口:

camera 接口

原文:http://blog.csdn.net/xubin341719/article/details/7727041
【转】android camera(二):摄像头工作原理、s5PV310 摄像头接口(CAMIF)的更多相关文章
- android camera(二):摄像头工作原理、s5PV310 摄像头接口(CAMIF)
一.摄像头工作原理 上一篇我们讲了摄像头模组的组成,工作原理,做为一种了解.下面我们析摄像头从寄存器角度是怎么工作的.如何阅读摄像头规格书(针对驱动调节时用到关键参数,以GT2005为例). 规格书, ...
- camera理论基础和工作原理
写在前面的话,本文是因为工作中需要编写摄像头程序,因为之前没有做过这类产品,所以网上搜索的资料,先整理如下,主要参考文章如下,如果有侵权,请联系我:另外,转载请注明出处.本文不一定全部正确,如果发现错 ...
- camera理论基础和工作原理【转】
转自:http://www.cnblogs.com/fjutacm/p/220631977df995512d136e4dbd411951.html 写在前面的话,本文是因为工作中需要编写摄像头程序,因 ...
- android多线程-AsyncTask之工作原理深入解析(下)
关联文章: Android 多线程之HandlerThread 完全详解 Android 多线程之IntentService 完全详解 android多线程-AsyncTask之工作原理深入解析(上) ...
- android多线程-AsyncTask之工作原理深入解析(上)
关联文章: Android 多线程之HandlerThread 完全详解 Android 多线程之IntentService 完全详解 android多线程-AsyncTask之工作原理深入解析(上) ...
- camera理论基础和工作原理(转)
源: camera理论基础和工作原理
- Android之view的工作原理2
学习内容 View的底层工作原理,比如View的测量流程.布局流程以及绘制流程:以及常见的View回调方法:熟悉掌握前面的知识后,自定义View的时候也会更加的得心应手. 4.1 初识ViewRoot ...
- Android 中View的工作原理
Android中的View在Android的知识体系中扮演着重要的角色.简单来说,View就是Android在视觉的体现.我们所展现的页面就是Android提供的GUI库中控件的组合.但是当要求不能满 ...
- Struts2(二):工作原理
struts可查看源码:https://github.com/apache/struts 在学习struts2之前,我先看了一些比较早版本对struts2的工作原理相关的介绍,顺便抄写过来,用来帮助自 ...
随机推荐
- 苹果拒绝App内部使用版本检测功能
10.6 - Apple and our customers place a high value on simple, refined, creative, well thought through ...
- Android软件开发之常用系统控件界面整理
1.文本框TextView TextView的作用是用来显示一个文本框,下面我用两种方式为大家呈现TextView, 第一种是通过xml布局文件呈现 ,第二种是通过代码来呈现,由此可见Android ...
- 一个用 Cumulative Penalty 培训 L1 正规 Log-linear 型号随机梯度下降
Log-Linear 模型(也叫做最大熵模型)是 NLP 领域中使用最为广泛的模型之中的一个.其训练常採用最大似然准则.且为防止过拟合,往往在目标函数中增加(能够产生稀疏性的) L1 正则.但对于 ...
- .net程序员转战android第三篇---登录模块之静态登录
这一篇我将分2个部分记录登录界面,第一部分是静态登录, 这部分将如何从界面布局.控件使用.文件关系.数据验证.登陆实现等5小块记录. 第二部分是动态登录,这块会基于上面的4小块,在数据验证不是静态数据 ...
- vs中动态DLL与静态LIB工程中加入版本信息的方法
说明:本文仅针对刚接触VS不久的新手们(包括ME),提供的一点小Tips,同时也是小生的首篇Blog文章,请大伙多多担待O(∩_∩)O哈! 步骤1 - 在工程中右键添加新建项 步骤2 - 选择创建RC ...
- 关于降低android手机摄像头预览分辨率
假设现在有这样一个需求需要一直开着手机摄像头 但是不做任何拍照动作 但是每个手机的相机分辨率都不同 而默认预览的时候参数是最大分辨率 这样有时候就回导致电量损耗的加快 所以我们可以采取降低相机分辨率的 ...
- sqlserver 执行远程数据库代码
1.启用Ad Hoc Distributed Queries: exec sp_configure 'show advanced options',1reconfigureexec sp_config ...
- 仿QQ好友列表界面的实现
TableView有2种style:UITableViewStylePlain 和 UITableViewStyleGrouped. 但是QQ好友列表的tableView给人的感觉似乎是2个style ...
- 初识KMP
KMP简介 KMP是一种由Knuth(D.E.Knuth).Morris(J.H.Morris)和Pratt(V.R.Pratt)设计的字符串匹配算法.对目标串T[0:n-1]中查找与之匹配的模式串P ...
- mac上访问samba服务器
打开safari输入smb://ip,回车后出现输入用户名密码对话框,若是匿名则选择作为“客人”选项 例子 smb://192.168.2.3