opencv边缘检测
人眼怎么识别图像边缘?
比如有一幅图,图里面有一条线,左边很亮,右边很暗,那人眼就很容易识别这条线作为边缘.也就是像素的灰度值快速变化的地方.
sobel算子
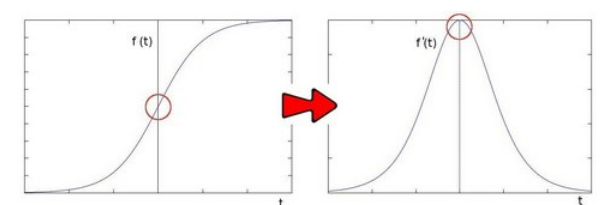
对于f(t),其导数f'(t)反映了每一处的变化趋势.在变化最快的位置其导数最大. sobel算子的思路就是模拟求一阶导数.
sobel算子是一个离散差分算子.它计算图像像素点亮度值的近似梯度.
图像是二维的,即沿着宽度/高度两个方向.
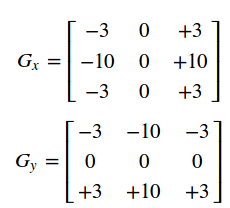
我们使用两个卷积核对原图像进行处理:
水平方向
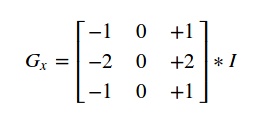
很好理解,原始像素灰度值-->(右边像素值-左边像素值),反映了水平方向的变化情况.垂直方向
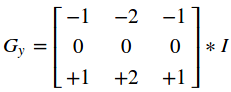
这样的话,我们就得到了两个新的矩阵,分别反映了每一点像素在水平方向上的亮度变化情况和在垂直方向上的亮度变换情况.
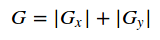
综合考虑这两个方向的变化,我们使用
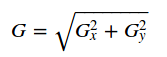
反映某个像素的梯度变化情况.
有时候为了简单起见,也直接用绝对值相加替代.
opencv里可以使用了如下的卷积核,可以"放大像素的变化情况".
可以参考这个函数Scharr
opencv实现
import cv2 as cv
def test():
src = cv.imread("/home/sc/disk/keepgoing/opencv_test/sidetest.jpeg")
src = cv.GaussianBlur(src, (3, 3), 0)
gray = cv.cvtColor(src, cv.COLOR_BGR2GRAY)
grad_x = cv.Sobel(gray, -1, 1, 0, ksize=3)
grad_y = cv.Sobel(gray, -1, 0, 1, ksize=3)
grad = cv.addWeighted(grad_x, 0.5, grad_y, 0.5, 0)
cv.imshow("origin",src)
cv.imshow("grad",grad)
cv.waitKey()
test()
首先是高斯模糊去噪.某种意义上说高斯模糊是和sobel相反的过程.高斯模糊平滑了某点像素与周边像素的差异.那为什么还要先高斯去噪呢?
噪声就是像素的强度相对于真值有个突变。从时域上讲,通过高斯滤波能让一个像素的强度与周围的点相关,就减小了突变的影响;从频域上讲,突变引入了高频分量,而高斯滤波器可以滤除高频分量。
高斯去噪是为了防止把噪点也检测为边缘.
然后计算grad_x,grad_y.即对原图做水平方向/垂直方向的sobel卷积核卷积
grad_x = cv.Sobel(gray, -1, 1, 0, ksize=3)
grad_y = cv.Sobel(gray, -1, 0, 1, ksize=3)
sobel api
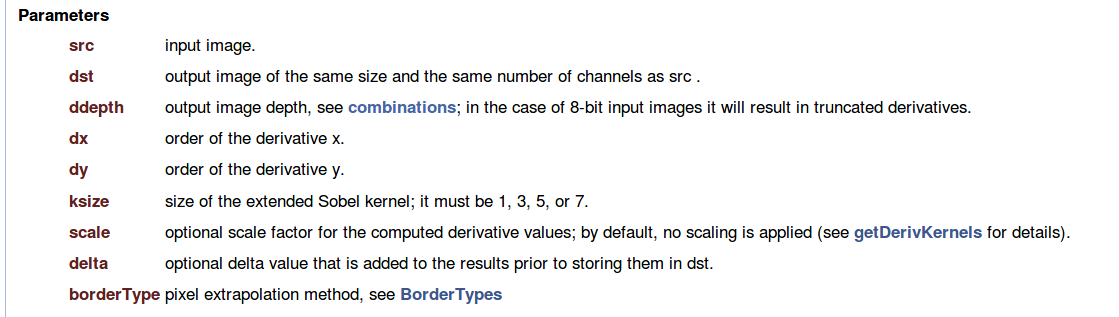
注意区分c++版本和python版本api. 在上述代码中,第二个参数-1代表我们希望输出的图像矩阵和原图有同样的depth,第3/4个参数分别代表在x/y方向做一阶差分.取值0或1.
ksize必须为奇数.
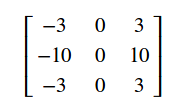
tips:通常我们使用( xorder = 1, yorder = 0, ksize = 3) or ( xorder = 0, yorder = 1, ksize = 3)来计算水平/垂直方向的一阶差分矩阵.ksize=3用的是标准sobel卷积核.如果ksize传入FILTER_SCHARR,则使用的是如下卷积核:
最后将两个矩阵叠加,综合考虑水平和垂直方向的像素灰度值变化强度.得到边缘.
grad = cv.addWeighted(grad_x, 0.5, grad_y, 0.5, 0)
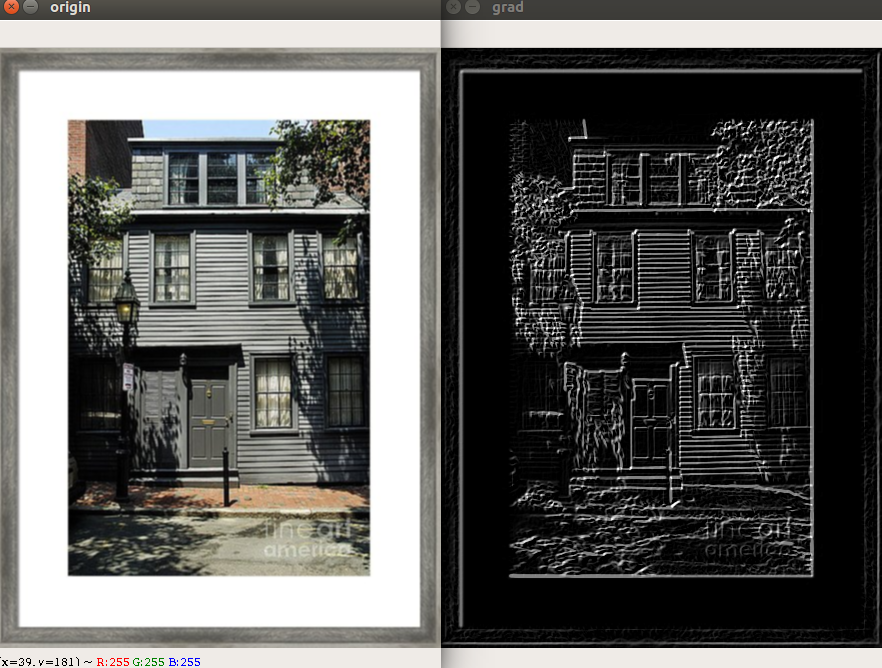
完整代码处理效果如下
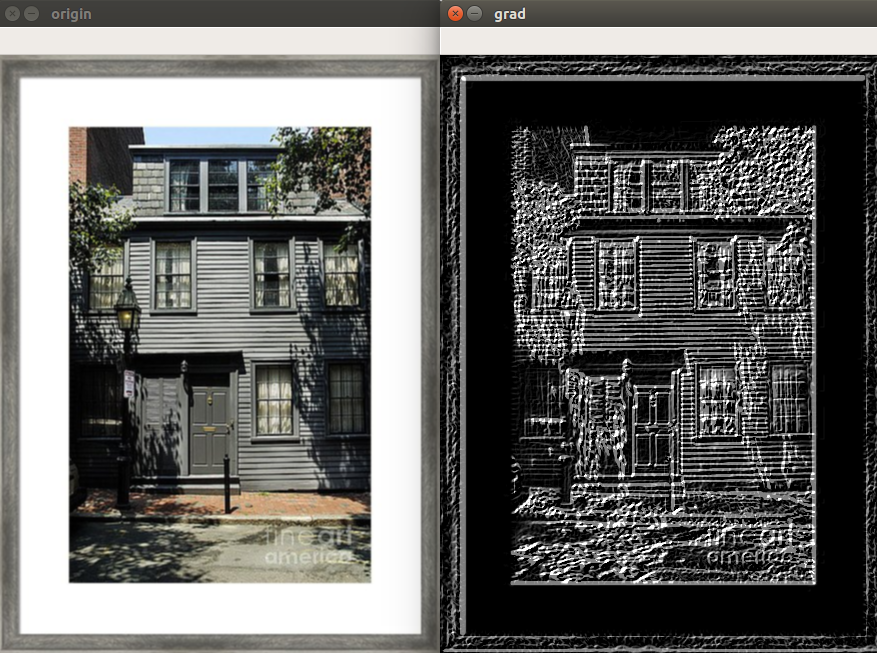
ksize采用cv.FILTER_SCHARR效果如下:
grad_x = cv.Sobel(gray, -1, 1, 0, ksize=cv.FILTER_SCHARR)
grad_y = cv.Sobel(gray, -1, 0, 1, ksize=cv.FILTER_SCHARR)
opencv边缘检测的更多相关文章
- [OpenCV入门教程之十二】OpenCV边缘检测:Canny算子,Sobel算子,Laplace算子,Scharr滤波器合辑
http://blog.csdn.net/poem_qianmo/article/details/25560901 本系列文章由@浅墨_毛星云 出品,转载请注明出处. 文章链接:http://blog ...
- OpenCV——边缘检测入门、Canny边缘检测
边缘检测的一般步骤: 最优边缘检测的三个评价标准: 低错误率:表示出尽可能多的实际边缘,同时尽可能地减少噪声产生的误报: 高定位性:标识出的边缘要与图像实际边缘尽可能接近: 最小响应:图像中的边缘只能 ...
- opencv边缘检测的入门剖析(第七天)
---边缘检测概念理解--- 边缘检测的理解可以结合前面的内核,说到内核在图像中的应用还真是多,到现在为止学的对图像的操作都是核的操作,下面还有更神奇的! 想把边缘检测出来,从图像像素的角度去想,那就 ...
- OpenCV边缘检测的详细参数调节
1. findCountours 转载于http://blog.sina.com.cn/s/blog_7155fb1a0101a90h.html findContours函数,这个函数的原型为: &l ...
- opencv边缘检测-拉普拉斯算子
sobel算子一文说了,索贝尔算子是模拟一阶求导,导数越大的地方说明变换越剧烈,越有可能是边缘. 那如果继续对f'(t)求导呢? 可以发现"边缘处"的二阶导数=0. 我们可以利用这 ...
- opencv 边缘检测原理
只是实现一下,暂不考虑效率 import cv2 as cv import numpy as np import math # 从源码层面实现边缘检测 img = cv.imread('../imag ...
- OpenCV——边缘检测(sobel算子、Laplacian算子、scharr滤波器)
#include <opencv2/opencv.hpp> #include <iostream> using namespace cv; using namespace st ...
- opencv边缘检测报错
cnts = cv2.findContours(edged_image.copy(), cv2.RETR_LIST, cv2.CHAIN_APPROX_SIMPLE)cnts = cnts[0] if ...
- 【资料分享】 OpenCV精华收藏
OpenCV精华收藏 SkySeraph Dec.29th 2010 HQU Email:zgzhaobo@gmail.com QQ:452728574 Latest Modified Dat ...
随机推荐
- 标准pcm数据(正弦波、方波、三角波)解读
一年前写了一个demo,用于生成几种标准的波形,如正弦波.方波.三角波.之前写的只有这几个功能:波形/通道/时长/频率的控制选择,这几天抽了些时间又加了增益控制功能.为了避免东西丢失或意外删除,特上传 ...
- Setup Factory 9 简单打包
由于项目资源太大,使用VS自带打包工具无法实现需求,所以Setup Factory 9进行打包生成多个文件的方案,下面记录使用方法: 一:这里点击下载:下载,提取码:tt7a 二:下载完安装需要注册码 ...
- Oracle - Sequences
创建计数器 --最小值1,最大值999999999999999999999999999,从1开始,每次自增1,缓存20 --SQL语句: -- Create sequence create seque ...
- 转载-Spring Boot应用监控实战
概述 之前讲过Docker容器的可视化监控,即监控容器的运行情况,包括 CPU使用率.内存占用.网络状况以及磁盘空间等等一系列信息.同样利用SpringBoot作为微服务单元的实例化技术选型时,我们不 ...
- P3469 [POI2008]BLO-Blockade 割点 tarjan
题意 给定一个无向图,问删掉点i,图中相连的有序对数.(pair<x, y> , x != y);求每个点对应的答案 思路 首先我们可以发现,如果这个点不是割点,那么答案就是n-1,如果是 ...
- H-Magic Line_2019 牛客暑期多校训练营(第三场)
题目连接: https://ac.nowcoder.com/acm/contest/883/H Description There are always some problems that seem ...
- POJ-1062 昂贵的聘礼( 最短路 )
题目链接:http://poj.org/problem?id=1062 Description 年轻的探险家来到了一个印 第安部落里.在那里他和酋长的女儿相爱了,于是便向酋长去求亲.酋长要他用1000 ...
- Linux音频编程(二)声卡介绍
一.声卡 1.声卡是audio interface,它含有hardware buffer,而这个hardware buffer是在声卡里面,不是内存.声卡的缓存是环状的,则ALSA中是将数据分成连续的 ...
- SqlServer数据库技巧
1.数值转换失败提供默认值 , )) end
- Keras之注意力模型实现
学习的一个github上的代码,分析了一下实现过程.代码下载链接:https://github.com/Choco31415/Attention_Network_With_Keras 代码的主要目标是 ...