opencv —— findContours、drawContours 寻找并绘制轮廓
轮廓图像与 Canny 图像的区别
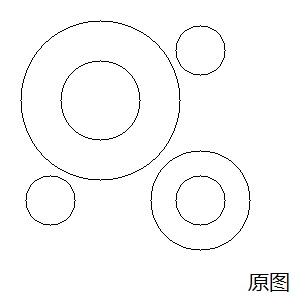
一个轮廓一般对应一系列的点,也就是图像中的一条曲线。轮廓图像和 Canny 图像乍看起来表现几乎是一致的,但其实组成两者的数据结构差别很大:
Canny 边缘图像是一个点的集合,点与点之间没有联系。
轮廓图像是一个点集的集合,每个点集(即轮廓)内的点都是相邻的,点集与点集之间也存在前后、父内等关系。
寻找轮廓:findContours 函数
findContours 函数用于在二值图像中寻找轮廓。
void findContours(InputArray image, OutputArrays contours, OutputArray hierarchy, int mode, int method, Point offset = Point());
- image,输入图像,即源图像,填 Mat 类的对象即可,可以是灰度图(非零像素被视为 1),但更常用的是二值图像,一般是经过Canny、拉普拉斯等边缘检测算子处理过的二值图像。
- contours,检测到的所有轮廓均会被存在这里。每个轮廓为一个点集,用 Point 类型的 vector 表示。所以会被定义为
vector<vector<Point> > contours
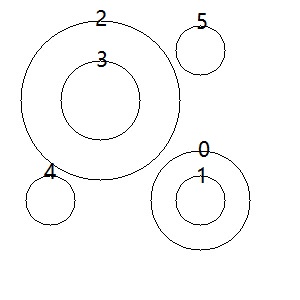
- hierarchy,每个轮廓 contours[i] 对应四个 hierarchy[i][0] ~ hierarchy[i][3],分别表示与当前轮廓平级的后一个轮廓的的索引编号、与当前轮廓平级的前一个轮廓的索引编号、当前轮廓的子轮廓的索引编号、当前轮廓的父轮廓的索引编号。如果没有对应项,hierarchy[i][x] = -1。
- mode,轮廓检索模式,取值如下:
| 标识符 | 含义 |
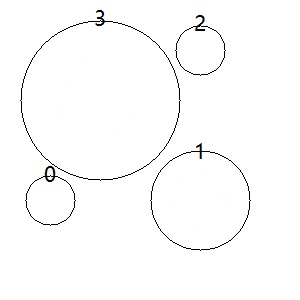
| RETR_EXTERNAL |
只检测最外层轮廓,包含在外围轮廓内的内围轮廓被忽略。不存在父轮廓或内嵌轮廓 (hierarchy[i][2] = hierarchy[i][3] = -1)。
|
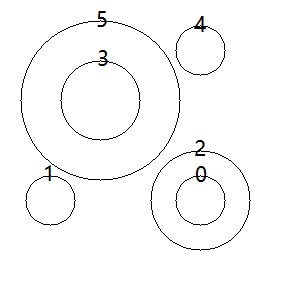
| RETR_LIST |
提取所有轮廓,并且放置在 list 中。不存在父轮廓或内嵌轮廓 (hierarchy[i][2] = hierarchy[i][3] = -1)。
|
| RETR_CCOMP |
提取所有轮廓,无论嵌套个数多少,都将其组织为双层结构(外层、内层)。
|
| RETR_TREE |
提取所有轮廓,并建立网状的轮廓结构(最外层轮廓为根)。
|
 再举个例子:
再举个例子: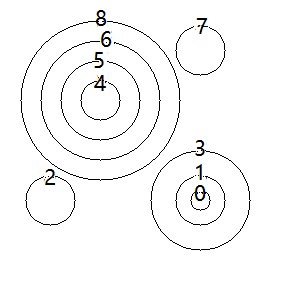
 再举个例子:
再举个例子:
 再举个例子:
再举个例子: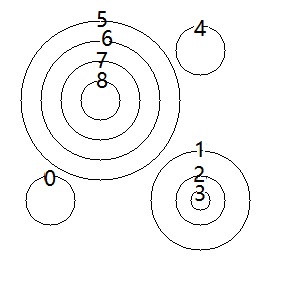
- method,轮廓的近似办法,取值如下:
| 标识符 | 含义 |
| CHAIN_APPROX_NONE | 获取每个轮廓的每个像素,相邻的两个像素位差不超过 1 像素。 |
| CHAIN_APPROX_SIMPLE | 仅保存轮廓的拐点信息,拐点与拐点之间直线段上的信息点不予保留。例如一个矩形轮廓只需 4 个点来保留轮廓信息。 |
|
CHAIN_APPROX_TC89_L1 CHAIN_APPROX_TC89_KCOS |
使用 teh-Chinl chain 近似算法。 |
- offset,所有的轮廓信息相对于原始图像对应点的偏移量,相当于在每一个检测出的轮廓点上加上该偏移量,有默认值 Point() 。对 ROI 区域(感兴趣区域)中找出的轮廓,并要在整个图像中进行分析时,这个参数便可派上用场。
绘制轮廓:drawContours 函数
void drawContours(InputOutputArray image, InputOutputArrays contours, int contourIdx, const Scalar& color, int thickness = 1, int lineType = 8, InputArray hierarchy = noArray(), int maxLevel = INT_MAX, Point offset = Point());
- image,目标图像,填 Mat 类对象即可。
- contours,输入的轮廓,每个轮廓都是一组点集,可用 Point 类型的 vector 表示。
- contourIdx,轮廓的索引编号。若为负值,则绘制所有轮廓。
- color,轮廓颜色。
- thickness,轮廓线条的粗细程度,有默认值 1。若其为负值,便会填充轮廓内部空间。
- lineType,线条的类型,有默认值 8。可去类型如下:
| 类型 | 含义 |
| 8 | 8 连通线型 |
| 4 | 4 连通线型 |
| LINE_AA | 抗锯齿线型 |
- hierarchy,可选的层次结构信息,有默认值 noArray()。
- maxLevel,用于绘制轮廓的最大等级,有默认值 INT_MAX。
- offset,轮廓信息相对于目标图像对应点的偏移量,相当于在每一个轮廓点上加上该偏移量,有默认值 Point() 。在 ROI 区域(感兴趣区域)绘制轮廓时,这个参数便可派上用场。
代码示例:
#include<opencv.hpp>
#include<iostream>
#include<vector>
using namespace std;
using namespace cv;
int main() {
Mat src = imread("C:/Users/齐明洋/Desktop/3.jpg");
imshow("src", src); Mat canny_img;
Canny(src, canny_img, , , );
//闭操作,先膨胀后腐蚀,可消除小黑点
Mat kernel = getStructuringElement(MORPH_RECT, Size(, ));
morphologyEx(canny_img, canny_img, MORPH_CLOSE, kernel);
imshow("canny_img", canny_img); Mat dst = Mat(src.rows, src.cols, CV_8UC3, Scalar(, , ));
vector<vector<Point> >contours; ////写法一
//vector<Vec4i>hierarchy;
//findContours(canny_img, contours,hierarchy, RETR_TREE, CHAIN_APPROX_NONE);
//for (int i = 0; i < contours.size(); i++) {
// drawContours(dst, contours, i, Scalar(0, 0, 255), 1, 8, hierarchy);
//} //写法二
findContours(canny_img, contours, RETR_TREE, CHAIN_APPROX_NONE);
drawContours(dst, contours, -, Scalar(, , ), ); imshow("dst", dst); waitKey();
}
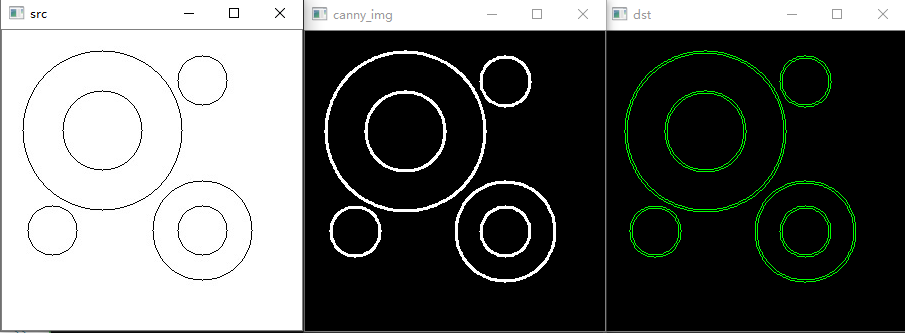
效果演示:
借鉴博客:https://www.cnblogs.com/GaloisY/p/11062065.html
https://blog.csdn.net/qq_35239859/article/details/99676501
opencv —— findContours、drawContours 寻找并绘制轮廓的更多相关文章
- opencv 6 图像轮廓与图像分割修复 1 查找并绘制轮廓 寻找物体的凸包
查找并绘制轮廓 寻找轮廓(findContours)函数 绘制轮廓(drawContours()函数) 基础实例程序:轮廓查找 #include <opencv2/opencv.hpp> ...
- 查找并绘制轮廓[OpenCV 笔记XX]
好久没有更新了,原谅自己放了个假最近又在赶进度,所以...更新的内容是很靠后的第八章,因为最近工作要用就先跳了,后面会更新笔记编号...加油加油! 在二值图像中寻找轮廓 void cv::findCo ...
- 机器学习进阶-图像金字塔与轮廓检测-轮廓检测 1.cv2.cvtColor(图像颜色转换) 2.cv2.findContours(找出图像的轮廓) 3.cv2.drawContours(画出图像轮廓) 4.cv2.contourArea(轮廓面积) 5.cv2.arcLength(轮廓周长) 6.cv2.aprroxPloyDP(获得轮廓近似) 7.cv2.boudingrect(外接圆)..
1. cv2.cvtcolor(img, cv2.COLOR_BGR2GRAY) # 将彩色图转换为灰度图 参数说明: img表示输入的图片, cv2.COLOR_BGR2GRAY表示颜色的变换形式 ...
- 【OpenCV函数】轮廓提取;轮廓绘制;轮廓面积;外接矩形
FindContours 在二值图像中寻找轮廓 int cvFindContours( CvArr* image, CvMemStorage* storage, CvSeq** first_cont ...
- OpenCV探索之路(十一):轮廓查找和多边形包围轮廓
Canny一类的边缘检测算法可以根据像素之间的差异,检测出轮廓边界的像素,但它没有将轮廓作为一个整体.所以要将轮廓提起出来,就必须将这些边缘像素组装成轮廓. OpenCV中有一个很强大的函数,它可以从 ...
- Python+OpenCV图像处理(十六)—— 轮廓发现
简介:轮廓发现是基于图像边缘提取的基础寻找对象轮廓的方法,所以边缘提取的阈值选定会影响最终轮廓发现结果. 代码如下: import cv2 as cv import numpy as np def c ...
- OpenCV应用(3) 简单轮廓匹配的小例子
具体应用 https://blog.csdn.net/kyjl888/article/details/85060883 OpenCV中提供了几个与轮廓相关的函数: findContours():从二值 ...
- Python 图像处理 OpenCV (15):图像轮廓
前文传送门: 「Python 图像处理 OpenCV (1):入门」 「Python 图像处理 OpenCV (2):像素处理与 Numpy 操作以及 Matplotlib 显示图像」 「Python ...
- 第十七节,OpenCV(学习六)图像轮廓检测
1.检测轮廓 轮廓检测是图像处理中经常用到的,OpenCV-Python接口中使用cv2.findContours()函数查找检测物体的轮廓. cv2.findContours(image, mode ...
随机推荐
- HttpApplication IHttpAsyncHandler, IHttpHandler, IComponent, IDisposable ps url System.Web.dll
// 摘要: // 定义 ASP.NET 应用程序中的所有应用程序对象共有的方法.属性和事件.此类是用户在 Global.asax 文件中所定义的应用程序的基类. [Toolb ...
- 用路由系统生成输出URL 在视图中生成输出URL 高级路由特性 精通ASP-NET-MVC-5-弗瑞曼
Using the Routing System to Generate an Outgoing URL 结果呢:<a href="/Home/CustomVariable" ...
- ValueError: The field admin.LogEntry.user was declared with a lazy reference to 'system.sysuser', bu
问题:已经在settings.py文件中注册过app仍旧提示没有安装,并且使用makegirations命令时会抛出如下异常. ValueError: The field admin.LogEntry ...
- http--->http缓存机制系统梳理
http缓存 HTTP请求的过程 从在浏览器地址栏敲入域名-DNS解析-实际IP-(中间可能多个代理服务器分发)- 源服务器,请求抵达源服务器后,在服务器上找到请求的资源,再通过代理服务器一层层的返回 ...
- springboot中使用自定义注解实现策略模式,去除工厂模式的switch或ifelse,实现新增策略代码零修改
前言 思路与模拟业务 源码地址 https://gitee.com/houzheng1216/springboot 整体思路就是通过注解在策略类上指定约定好的type,项目启动之后将所有有注解的typ ...
- springboot-mybatis配置问题
org.apache.ibatis.binding.BindingException: Invalid bound statement (not found)问题
- mint ui的tabBar监听路由变化实现tabBar切换
说明 最近学习vue,使用了mint ui的tabBar,感觉好难受,结合 tab-container使用更难受,因为它不是根据路由来切换页面的.mui与它基本相反,因此它能根据搜索栏的路由变化,相应 ...
- 一道面试题引发的对 Java 内存模型的一点疑问
一道面试题引发的对Java内存模型的一点疑问 问题描述 如上图所示程序,按道理,子线程会通过 num++ 操作破坏 while 循环的条件,从而终止循环,执行最后的输出操作.但在我的多次运行中,偶尔会 ...
- Flink安装及实例教程
通过本教程我们将快速部署好flink在linux下的环境,并通过flink完成一个小demo的测试 一.准备阶段 flink压缩包下载(1.7.2): http://archive.apache.or ...
- ubuntu 14.04 如何设置静态ip
有线网络: 1. 找到文件并作如下修改: sudo vim /etc/network/interfaces 修改如下部分: auto eth0iface eth0 inet staticaddress ...