ROS系统的安装以及卸载
- ROS系统的安装
ROS系统的安装方式有两种,通过软件源和源码编译安装。软件源安装只需要通过简单的命令,因此,我们使用软件源来安装ROS
- 配置系统软件源
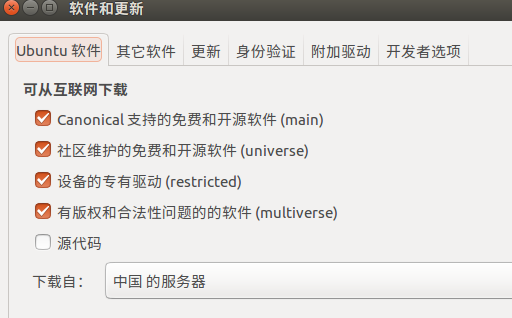
打开Ubuntu软件中心的软件源配置界面,勾选restricted,universe,multiverse三个选项
软件源切换,安装过程出现问题的,一般与网络和软件源有关系,可以切换成手机热点试试 ,我改成阿里云的源,我的系统是16.04
sudo su #输入密码
cd /etc/apt #切换到apt源文件
mv sources.list sources.list_bak #备份源文件
vim sources.list #新建一个,然后将下面的内容copy进去
# deb cdrom:[Ubuntu 16.04 LTS _Xenial Xerus_ - Release amd64 (20160420.1)]/ xenial main restricted
deb-src http://archive.ubuntu.com/ubuntu xenial main restricted #Added by software-properties
deb http://mirrors.aliyun.com/ubuntu/ xenial main restricted
deb-src http://mirrors.aliyun.com/ubuntu/ xenial main restricted multiverse universe #Added by software-properties
deb http://mirrors.aliyun.com/ubuntu/ xenial-updates main restricted
deb-src http://mirrors.aliyun.com/ubuntu/ xenial-updates main restricted multiverse universe #Added by software-properties
deb http://mirrors.aliyun.com/ubuntu/ xenial universe
deb http://mirrors.aliyun.com/ubuntu/ xenial-updates universe
deb http://mirrors.aliyun.com/ubuntu/ xenial multiverse
deb http://mirrors.aliyun.com/ubuntu/ xenial-updates multiverse
deb http://mirrors.aliyun.com/ubuntu/ xenial-backports main restricted universe multiverse
deb-src http://mirrors.aliyun.com/ubuntu/ xenial-backports main restricted universe multiverse #Added by software-properties
deb http://archive.canonical.com/ubuntu xenial partner
deb-src http://archive.canonical.com/ubuntu xenial partner
deb http://mirrors.aliyun.com/ubuntu/ xenial-security main restricted
deb-src http://mirrors.aliyun.com/ubuntu/ xenial-security main restricted multiverse universe #Added by software-properties
deb http://mirrors.aliyun.com/ubuntu/ xenial-security universe
deb http://mirrors.aliyun.com/ubuntu/ xenial-security multiverse
sudo apt-get update
2.添加ROS软件源
打开终端,输入命令,国内的相对来说快一点
ROS官方软件镜像源
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list' 4 中山大学镜像源
5 sudo sh -c '. /etc/lsb-release && echo "deb http://mirror.sysu.edu.cn/ros/ubuntu/ $DISTRIB_CODENAME main" > /etc/apt/sources.list.d/ros-latest.list'
3.添加密钥
sudo apt-key adv --keyserver hkp://pool.sks-keyservers.net --recv-key 0xB01FA116
4.安装ROS
sudo apt-get update
sudo apt-get install ros-kinetic-desktop-full
ROS系统版本众多,kinetic版本支持到2021年,Indigo版本支持到2019年,因此选择kinetic桌面完整版,它包括了ROS的核心功能,以及机器人地图建模,自主导航,rviz可视化工具,gazebo仿真环境,rqt工具箱等。
5.初始化rosdep
rosdep主要功能是为某些功能安装系统依赖
sudo rosdep init
rosdep update
6.设置环境变量
echo "source /opt/ros/kinetic/setup.bash" >> ~/.bashrc
source ~/.bashrc
使用下面两条命令来查看环境变量是否设置好
export | grep ROS
env |grep ROS
7.安装rosinstall
sudo apt-get install python-rosinstall
8.完成安装
ROS安装在/opt目录下
运行roscore
roscore
9.设置工作空间
mkdir -p ~/catkin_ws/src
cd ~/catkin_ws/src
catkin_init_workspace
cd ~/catkin_ws/ catkin_make
source devel/setup.bash
7 检查所有环境变量,我们设置了两个,他们之间用:隔开
8 echo $ROS_PACKAGE_PATH

- ROS系统的卸载
sudo apt-get remove ros-*
参考:胡春旭ROS机器人开发实践
ROS系统的安装以及卸载的更多相关文章
- 教你一招:解决win10/win8.1系统在安装、卸载软件时出现2502、2503错误代码的问题
经常遇到win10/win8.1系统在安装.卸载软件时出现2502.2503错误代码的问题. 解决办法: 1.打开任务管理器后,切换到“详细信息”选项卡,找到explore.exe这个进程,然后结束进 ...
- 在windows系统下虚拟机和ubuntu系统的安装和卸载
一.安装 之前有装过双系统,但是吧,一直用ubuntu系统,很久没进windows之后的某一天,自己再进windows,发现windows系统崩了,我也不知道为什么,找了很多方法没有解决,最后只好重装 ...
- linux mint 19.2与Windows 10 双系统硬盘安装与卸载
安装linux mint 和win10双系统: 1.win10系统下如果没有空闲分区,请从容量较大的分区用partition manager在选中的较大的分区下,调整大小.此步骤最好在pe下的part ...
- 手把手教你Windows Linux双系统的安装与卸载
作者:-叶丶知秋 链接:https://blog.csdn.net/fanxueya1322/article/details/90205143 转载请保留出处 良许前言: 后台突然有很多小伙伴留言想看 ...
- CentOS系统下安装以及卸载mysql
CentOS7的yum源中默认好像是没有mysql的.为了解决这个问题,我们要先下载mysql的repo源. 1. 下载mysql的repo源 [root@localhost `]$ wget htt ...
- Windows 7系统下安装和卸载删除IE的方法
1.首先按下 Windows +R 键打开“运行”的窗口,请输入“appwiz.cpl”. 2.在「程序和功能」窗口上按下左上的「查看已安装的更新」. 3.找到「Windows Internet Ex ...
- IE浏览器-在Win7系统的安装和卸载
关于安装 在虚拟机(VMware Workstation)的Win7操作系统里,安装从官网下载的IE9/10/11 For Win7,始终失败.于是通过其它途径搜索到IE9/10/11 For Win ...
- Linux系统上安装、卸载JAVA、TOMCAT的方法
一. 安装JAVA 安装方法1:手工上传 创建安装目录上传JAVA安装包 Normal 0 7.8 磅 0 2 false false false EN-US ZH-CN X-NONE /* Styl ...
- Android中实现静态的默认安装和卸载应用
近期好长时间都没有写blog了,主要是由于近期工作上的事以及下载Android源代码的事耽误的(下载源代码这件事会在兴许的blog中写道.这个真的非常有意义呀~~),那么今天来写点什么呢?基本的灵感来 ...
随机推荐
- nmap脚本(nse)使用总结
nmap脚本主要分为以下几类,在扫描时可根据需要设置--script=类别这种方式进行比较笼统的扫描: auth: 负责处理鉴权证书(绕开鉴权)的脚本 broadcast: 在局域网内探查更多服务 ...
- P2197 【模板】nim游戏
博弈初心者... 学习地址luogu上可以找到.关于比较好的证明地址放在了地址页里了.这里不再赘述. 大概感觉还是所谓先手必胜就是面对当前局面一定可以采取一种策略,然后后手无论再怎么做,先手都可以“控 ...
- k8s资源对象及API群组
REST是representational state transfer的缩写,意为“表征状态转移”,它是一种程序架构风格,基本元素为资源(resource).表征(representation)和行 ...
- restful api 相关
404:资源没有找到400:参数错误 200:Get获取成功201:Post创建成功202:Put更新成功 401:未授权403:当前的资源禁止 500:服务器的未知错误 错误码 错误信息 当前url ...
- Python基础-day05
高级变量类型 目标 列表 元组 字典 字符串 公共方法 变量高级 知识点回顾 Python 中数据类型可以分为 数字型 和 非数字型 数字型 整型 (int) 浮点型(float) 布尔型(bool) ...
- ConfigMap-k8s
创建方式 创建ConfigMap的方式有4种: 1,通过直接在命令行中指定configmap参数创建,即--from-literal 2,通过指定文件创建,即将一个配置文件创建为一个ConfigMap ...
- EasyUI DataGrid undefined处理
处理undefined var val = null; console.log(val); console.log(val || ""); val = undefined; con ...
- CentOS 7 各个版本的区别
CentOS 7 各个版本的区别 2017年07月04日 10:44:37 程诺 阅读数 52029 版权声明:本文为博主原创文章,未经博主允许不得转载. https://blog.csdn.n ...
- 015 pip的使用
目录 一.配置pip环境变量 二.Cmd终端使用pip 三.Pycharm使用pip 四.Jupyter使用pip 如果把python假想成一部手机,那么pip就是这部手机上的应用管家/APP,他可以 ...
- supsplk 服务器被植入木马 挖矿 cpu使用 700%
最近emr集群跑任务的时候总出现 task failed ,优化sql,调提交任务参数都没解决,最后再我排查时候,发现一个从节点的cpu使用800% 经过一些列排查,发现是被注入木马了, #被人种下的 ...