ROS系统的安装以及卸载
- ROS系统的安装
ROS系统的安装方式有两种,通过软件源和源码编译安装。软件源安装只需要通过简单的命令,因此,我们使用软件源来安装ROS
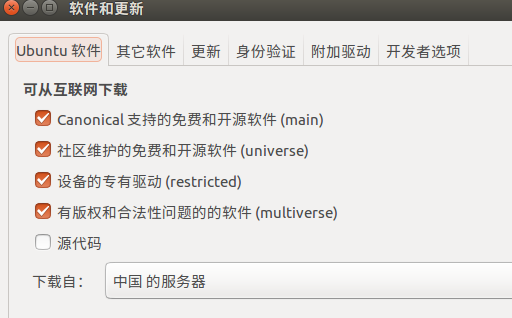
- 配置系统软件源
打开Ubuntu软件中心的软件源配置界面,勾选restricted,universe,multiverse三个选项
软件源切换,安装过程出现问题的,一般与网络和软件源有关系,可以切换成手机热点试试 ,我改成阿里云的源,我的系统是16.04
sudo su #输入密码
cd /etc/apt #切换到apt源文件
mv sources.list sources.list_bak #备份源文件
vim sources.list #新建一个,然后将下面的内容copy进去
# deb cdrom:[Ubuntu 16.04 LTS _Xenial Xerus_ - Release amd64 (20160420.1)]/ xenial main restricted
deb-src http://archive.ubuntu.com/ubuntu xenial main restricted #Added by software-properties
deb http://mirrors.aliyun.com/ubuntu/ xenial main restricted
deb-src http://mirrors.aliyun.com/ubuntu/ xenial main restricted multiverse universe #Added by software-properties
deb http://mirrors.aliyun.com/ubuntu/ xenial-updates main restricted
deb-src http://mirrors.aliyun.com/ubuntu/ xenial-updates main restricted multiverse universe #Added by software-properties
deb http://mirrors.aliyun.com/ubuntu/ xenial universe
deb http://mirrors.aliyun.com/ubuntu/ xenial-updates universe
deb http://mirrors.aliyun.com/ubuntu/ xenial multiverse
deb http://mirrors.aliyun.com/ubuntu/ xenial-updates multiverse
deb http://mirrors.aliyun.com/ubuntu/ xenial-backports main restricted universe multiverse
deb-src http://mirrors.aliyun.com/ubuntu/ xenial-backports main restricted universe multiverse #Added by software-properties
deb http://archive.canonical.com/ubuntu xenial partner
deb-src http://archive.canonical.com/ubuntu xenial partner
deb http://mirrors.aliyun.com/ubuntu/ xenial-security main restricted
deb-src http://mirrors.aliyun.com/ubuntu/ xenial-security main restricted multiverse universe #Added by software-properties
deb http://mirrors.aliyun.com/ubuntu/ xenial-security universe
deb http://mirrors.aliyun.com/ubuntu/ xenial-security multiverse
sudo apt-get update
2.添加ROS软件源
打开终端,输入命令,国内的相对来说快一点
ROS官方软件镜像源
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list' 4 中山大学镜像源
5 sudo sh -c '. /etc/lsb-release && echo "deb http://mirror.sysu.edu.cn/ros/ubuntu/ $DISTRIB_CODENAME main" > /etc/apt/sources.list.d/ros-latest.list'
3.添加密钥
sudo apt-key adv --keyserver hkp://pool.sks-keyservers.net --recv-key 0xB01FA116
4.安装ROS
sudo apt-get update
sudo apt-get install ros-kinetic-desktop-full
ROS系统版本众多,kinetic版本支持到2021年,Indigo版本支持到2019年,因此选择kinetic桌面完整版,它包括了ROS的核心功能,以及机器人地图建模,自主导航,rviz可视化工具,gazebo仿真环境,rqt工具箱等。
5.初始化rosdep
rosdep主要功能是为某些功能安装系统依赖
sudo rosdep init
rosdep update
6.设置环境变量
echo "source /opt/ros/kinetic/setup.bash" >> ~/.bashrc
source ~/.bashrc
使用下面两条命令来查看环境变量是否设置好
export | grep ROS
env |grep ROS
7.安装rosinstall
sudo apt-get install python-rosinstall
8.完成安装
ROS安装在/opt目录下
运行roscore
roscore
9.设置工作空间
mkdir -p ~/catkin_ws/src
cd ~/catkin_ws/src
catkin_init_workspace
cd ~/catkin_ws/ catkin_make
source devel/setup.bash
7 检查所有环境变量,我们设置了两个,他们之间用:隔开
8 echo $ROS_PACKAGE_PATH

- ROS系统的卸载
sudo apt-get remove ros-*
参考:胡春旭ROS机器人开发实践
ROS系统的安装以及卸载的更多相关文章
- 教你一招:解决win10/win8.1系统在安装、卸载软件时出现2502、2503错误代码的问题
经常遇到win10/win8.1系统在安装.卸载软件时出现2502.2503错误代码的问题. 解决办法: 1.打开任务管理器后,切换到“详细信息”选项卡,找到explore.exe这个进程,然后结束进 ...
- 在windows系统下虚拟机和ubuntu系统的安装和卸载
一.安装 之前有装过双系统,但是吧,一直用ubuntu系统,很久没进windows之后的某一天,自己再进windows,发现windows系统崩了,我也不知道为什么,找了很多方法没有解决,最后只好重装 ...
- linux mint 19.2与Windows 10 双系统硬盘安装与卸载
安装linux mint 和win10双系统: 1.win10系统下如果没有空闲分区,请从容量较大的分区用partition manager在选中的较大的分区下,调整大小.此步骤最好在pe下的part ...
- 手把手教你Windows Linux双系统的安装与卸载
作者:-叶丶知秋 链接:https://blog.csdn.net/fanxueya1322/article/details/90205143 转载请保留出处 良许前言: 后台突然有很多小伙伴留言想看 ...
- CentOS系统下安装以及卸载mysql
CentOS7的yum源中默认好像是没有mysql的.为了解决这个问题,我们要先下载mysql的repo源. 1. 下载mysql的repo源 [root@localhost `]$ wget htt ...
- Windows 7系统下安装和卸载删除IE的方法
1.首先按下 Windows +R 键打开“运行”的窗口,请输入“appwiz.cpl”. 2.在「程序和功能」窗口上按下左上的「查看已安装的更新」. 3.找到「Windows Internet Ex ...
- IE浏览器-在Win7系统的安装和卸载
关于安装 在虚拟机(VMware Workstation)的Win7操作系统里,安装从官网下载的IE9/10/11 For Win7,始终失败.于是通过其它途径搜索到IE9/10/11 For Win ...
- Linux系统上安装、卸载JAVA、TOMCAT的方法
一. 安装JAVA 安装方法1:手工上传 创建安装目录上传JAVA安装包 Normal 0 7.8 磅 0 2 false false false EN-US ZH-CN X-NONE /* Styl ...
- Android中实现静态的默认安装和卸载应用
近期好长时间都没有写blog了,主要是由于近期工作上的事以及下载Android源代码的事耽误的(下载源代码这件事会在兴许的blog中写道.这个真的非常有意义呀~~),那么今天来写点什么呢?基本的灵感来 ...
随机推荐
- Linux双网口配置时重复配置DEFROUTE和GATEWAY
配置一台机器时,沿袭了原有网口配置,修改网口名,把em1全部修改改为eth0 mv ifcfg-em1 ifcfg-eth0 mv ifcfg-em2 ifcfg-eth1 改完以后,机器变得不稳定, ...
- javaweb 一个坑—— writer必须放在response相关设置后面
https://blog.csdn.net/weixin_33962621/article/details/86454414
- MyEclipse导航代码第二弹,Java开发更便捷
[MyEclipse CI 2019.4.0安装包下载] 无论是在文件之间导航还是在文件中导航,都可以使用大量导航工具来加快工作流程.目前这些导航工具可在MyEclipse,CodeMix中使用. 单 ...
- django-视图层与模板层
1.视图层 小白必会三板斧 1.HttpResponse return HttpResponse(‘字符串’) 2.render return render(request,‘HTML页面’ ,{‘n ...
- JAVA笔记12-接口interface
1.概念:接口是抽象方法和常量值得定义的集合.本质上,接口是一种特殊的抽象类,这种抽象类只包含常量和方法的定义,而没有变量和方法的实现. 接口定义举例: 2.接口特性: (1)接口可以多重实现:(接口 ...
- sqlite3创建自增主键,以及清空表使自增列归零
1.创建自增主键 CREATE TABLE tb_python (ID INTEGER PRIMARY KEY AUTOINCREMENT,TITLE TEXT,URL TEXT); 2.清空表 SQ ...
- centos 修改时区以及修正时间
1.查看系统当前的时区 [app@127-0-0-1 shine]$ timedatectl Local time: Wed 2019-10-23 17:56:17 CST Universal tim ...
- [Linux系统] (1)常用操作(CentOS 7.x)
一.Linux系统配置 1.修改主机名 [/etc/hostname] vi /etc/hostname 在其中将旧名字修改为新主机名,保存,重启生效. 2.本地DNS映射 [/etc/hosts] ...
- XML的树结构与语法规则
㈠概念 什么是 XML? ⑴XML 指可扩展标记语言(EXtensible Markup Language) ⑵XML 是一种标记语言,很类似 HTML ⑶XML 的设计宗旨是传输数据,而非显示数据 ...
- jprofiler 监听远程java项目
1.下载.安装windows和linux版的jprofile.注意:若监控的是springboot.springcloud项目,切记本地和服务器上的jprofile要版本保持一致,本人亲自踩过坑. 官 ...