基于STM8的IIC协议---STM8-第五章
1. 综述
I2C(IIC,Inter-Integrated Circuit),两线式串行总线,由PHILIPS公司开发用于连接微控制器及其外围设备。
它是由数据线SDA和时钟SCL构成的串行总线,可发送和接收数据。在CPU和被控IC之间、IC与IC之间进行双向传送,高速IIC总线一般可达400kbps以上。但在STM8中,400kHZ已经是最快速度了。
2.关于STM8S103手册的I2C简介
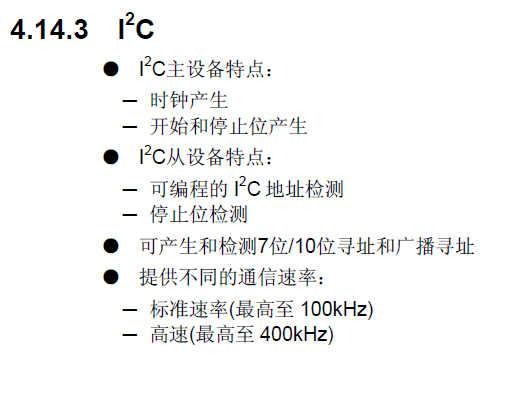
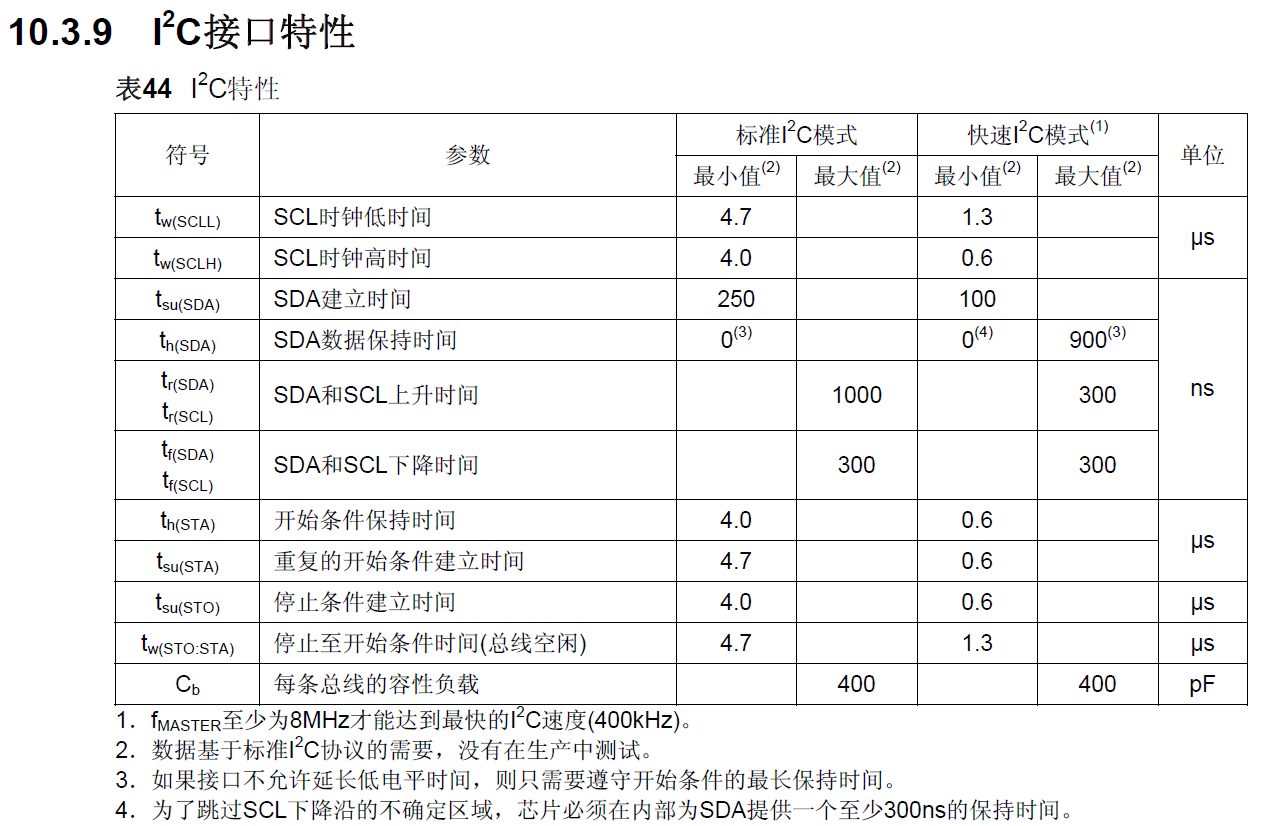
芯片手册中只对I2C的特点进行了简单的讲解,但并未深入解析其中的过程。
3. I2C详细解析
I2C总共由五个核心函数,分别为:①起始信号②停止信号③应答信号④发送数据⑤接收数据,通过这五个核心基本函数就能于大多数的传感进行通信了。
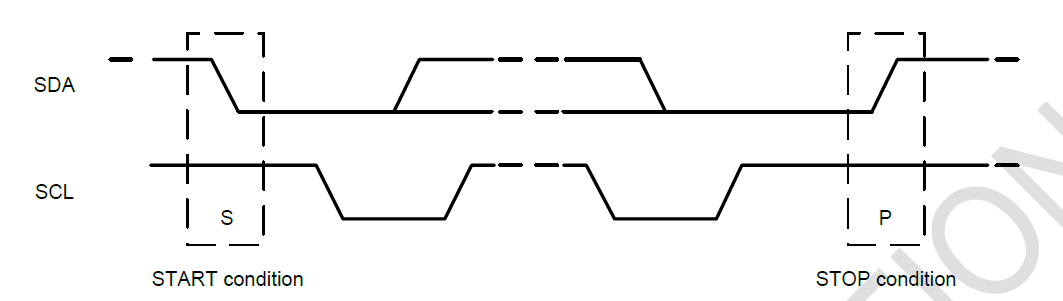
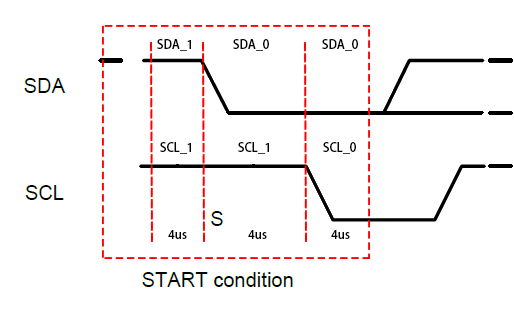
3.1 起始信号
当SCL为高电平期间,SDA由高电平到低电平的跳变过程;起始信号是一种电平跳变时序信号,而不是一个电平信号,如图虚线框所示。
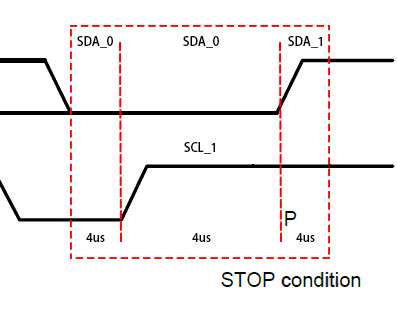
3.2 停止信号
当SCL为高电平期间,SDA由低电平到高电平的跳变过程;停止信号也是一种电平跳变时序信号,而不是一个电平信号,如图虚线框所示。
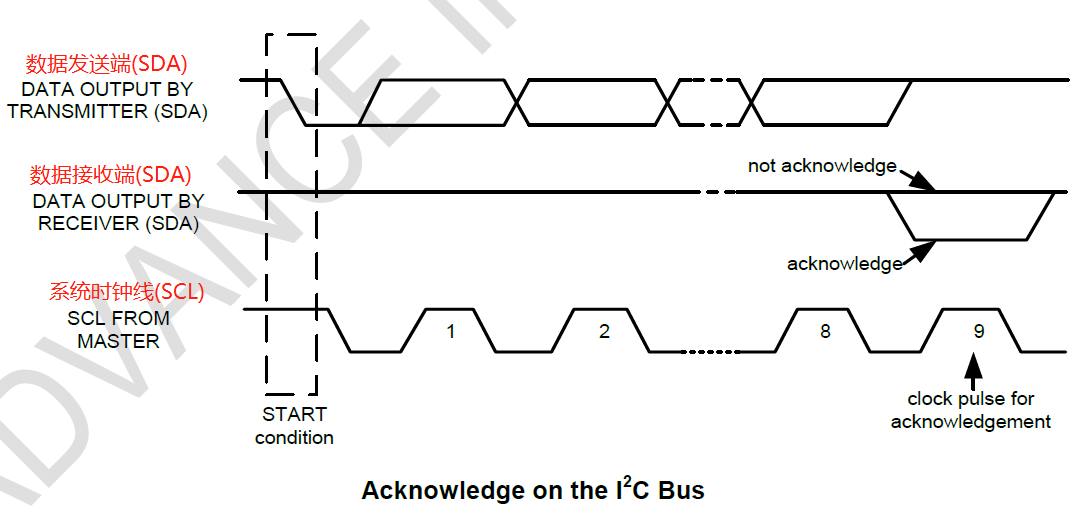
3.3 应答信号
I2C的数据字节定义为8位长,对于发送端每发送1个字节后,需要将数据线(SDA)释放,由接收端反馈一个应答信号(ACK)。应答信号为低电平时,则将其规定为有效信号(ACK简称应答位),表示接收端已经成功接收了该字节;应答位为高电平时,规定为非应答位(NACK),一般表示接收端没有成功接收该字节。
对于反馈有效应答位ACK的要求是,接收端在第9个时钟脉冲之前的低电平期间将SDA线拉低,并且确保在该时钟的高电平期间为稳定的低电平。如果接收端是主机,则在它接收到最后一个字节后,发送一个NACK信号,以通知发送端结束数据发送,并释放SDA线,以便主机接收端发送一个停止信号。
3.4 发送数据
在发送起始信号后开始通信,主机发送一个8位数据。然后,主机释放SDA线并等待从从机发出得确认信号(ACK)。详细过程请看4.3.7代码示例。
3.5 接收数据
在发送起始信号后开始通信,主机发送一个8位数据。然后,从机收到数据返回一个确认信号(ACK)给主机,这时候主机才开始接收数据,待主机接收数据完成后,发送一个NACK信号给从机,以通知接收端结束数据接收。详细过程请看4.3.8代码示例。
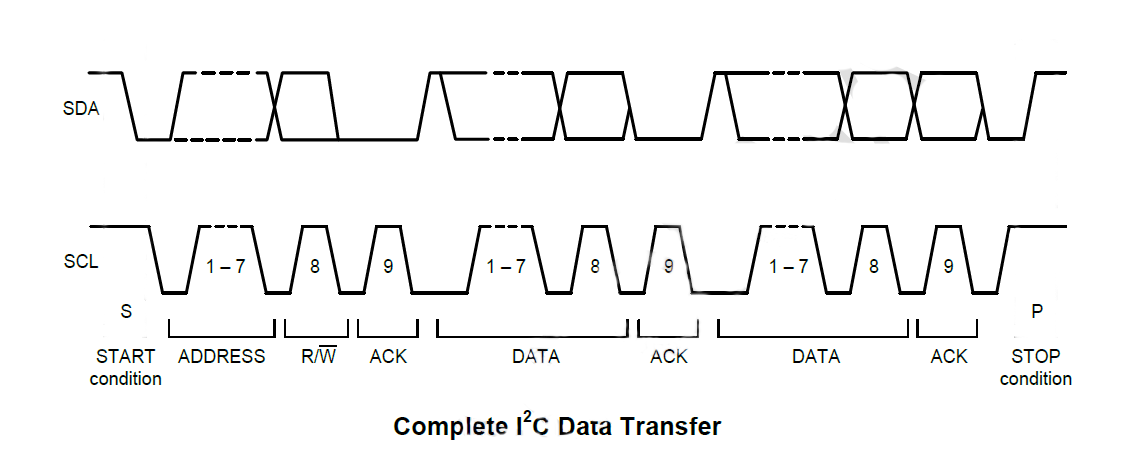
3.6 数据有效性
I2C总线进行数据传送时,时钟信号为高电平期间,数据线上的数据必须保持稳定,只有在时钟线上的信号为低电平期间,数据线上的高电平或低电平状态才允许变化。
3.7 I2C通信总过程
4. 例程
4.1 编译环境:
我的编译环境是IAR,这款软件是现在STM8的主流平台,比较推荐。不过我打算等到STCubeMX更新出比较方便的版本后再去使用Keil5,因为我在用STM32的时候就是利用Keil5,的确很方便,你们也可以学着用一下。
4.2 主芯片:
我的主芯片是STM8S系列中的103,其中STM8S的003、005、和103、105,配置一样(外设和CPU频率,FLASH),在代码相同的情况下均可进行烧写。
4.3 代码&解析
I2C的基本函数代码我已经和传感的代码区隔开来,可以移植,几乎适用于市面上使用I2C驱动的传感器。
4.3.1 SDA、SCL引角初始化
//IIC引脚
GPIO_Init(IIC_SCL_GPIO_Port, IIC_SCL_Pin, GPIO_MODE_OUT_PP_HIGH_FAST);
GPIO_Init(IIC_SDA_GPIO_Port, IIC_SDA_Pin, GPIO_MODE_OUT_PP_HIGH_FAST);
在引角的控制上面,我选择了直接操作GPIO的寄存器,这样操作比较快,虽然我们感觉不出来,但是省出来的时间越来越多了,也就能够体现出这样写的好处了,不过不理解怎么用的话,也可以使用库函数进行写高、低电平。
我在SDA引角初始化的时候,选择了推挽输出_高电平_高速,这里就有人会有疑问了,SDA是会进行接收ACK信号的,需要接收即为输入模式,怎么这里改成输出模式,看过我STM8_GPIO介绍的博客的小伙伴应该会想到,怎么不使用开漏输出,这个模式既能接收也能发送。没错,开漏输出模式的确可以,但我在那篇博客中也有说到,开漏输出模式不稳定,通过示波器观察到是斜三角的,而推挽输出是完整的矩形。图我就懒得去弄了 -。- ,而如何解决推挽输出能够接收ACK的操作看我下一小节。
4.3.1 I2C结构体和引角配置
这里的结构体是方便I2C多线程,以后需要用到多个I2C接口时候,只需要再定义多一个该结构变量,赋予其他引角便可,省去了再次编写代码的时间和空间。
我在26和26行编写了两行代码,分别是将SDA模式改成输出和输入模式,直接更改寄存器里的值就能完成实现模式的更换,想知道为什么这样写可以改变模式的话,可以自行百度,也可以察看相对应芯片的寄存器手册。STM8S103中的则在6.2小节中就有介绍。因为讲解起来比较麻烦,这里就不进行更深入的说明了。
/* Struct --------------------------------------------------------------------*/ typedef struct iic
{
//具体信息:引脚 读写判定
GPIO_TypeDef * pSCL_Port; //SCL Gpio
uint8_t uSCL_Pin; //SCL Pin
GPIO_TypeDef * pSDA_Port; //SDA Gpio
uint8_t uSDA_Pin; //SDA Pin uint8_t uSDA_Mode_Pin_Position;//SDA Mode }IIC_HandleTypedef; /* Define --------------------------------------------------------------------*/ #define IIC_SCL_1(_HANDLE_) ( (_HANDLE_)->pSCL_Port->ODR |= ( (uint8_t)(_HANDLE_)->uSCL_Pin))
#define IIC_SCL_0(_HANDLE_) ( (_HANDLE_)->pSCL_Port->ODR &= (~(uint8_t)(_HANDLE_)->uSCL_Pin)) #define IIC_SDA_1(_HANDLE_) ( (_HANDLE_)->pSDA_Port->ODR |= ( (uint8_t)(_HANDLE_)->uSDA_Pin))
#define IIC_SDA_0(_HANDLE_) ( (_HANDLE_)->pSDA_Port->ODR &= (~(uint8_t)(_HANDLE_)->uSDA_Pin))
#define IIC_SDA_R(_HANDLE_) ( (BitStatus)(_HANDLE_)->pSDA_Port->IDR & (_HANDLE_)->uSDA_Pin) #define IIC_GPIO_SDA_MODE_Opt(_HANDLE_) (_HANDLE_)->pSDA_Port->ODR |= (uint8_t)1<<(_HANDLE_)->uSDA_Mode_Pin_Position
#define IIC_GPIO_SDA_MODE_Ipt(_HANDLE_) (_HANDLE_)->pSDA_Port->ODR &= ~((uint8_t)1<<(_HANDLE_)->uSDA_Mode_Pin_Position)
4.3.2 延时函数
延时函数顾名思义,就单纯的延时,延时时间可以根据芯片的速率调整,具体时间通过示波器或者可以观察到脉冲的仪器进行测量即可。
这里定义了两个延时函数目的是在SCL低电平期间先提前改变SDA的电平,待到SDA电平稳定时,再将SCL电平改变进行读取。
void vIIC_Delay_4us(void)
{
uint8_t i=;
while(i--)
{
asm(" NOP");asm(" NOP");asm(" NOP");asm(" NOP");
} } void vIIC_Delay_2us(void)
{
asm(" NOP");asm(" NOP");asm(" NOP");
}
4.3.3 IIC引角赋值&结构体参数初始化
每次调用I2C接口时都需要对IIC的句柄进行初始化。
void vIIC_Handle_Init(IIC_HandleTypedef * hIICx, GPIO_TypeDef * pSCL_Port, uint8_t uSCL_Pin, GPIO_TypeDef * pSDA_Port, uint8_t uSDA_Pin)
{
//GPIO
hIICx->pSCL_Port = pSCL_Port;
hIICx->uSCL_Pin = uSCL_Pin ;
hIICx->pSDA_Port = pSDA_Port;
hIICx->uSDA_Pin = uSDA_Pin ; switch(uSDA_Pin)
{
case GPIO_PIN_0 : hIICx->uSDA_Mode_Pin_Position = ;break;
case GPIO_PIN_1 : hIICx->uSDA_Mode_Pin_Position = ;break;
case GPIO_PIN_2 : hIICx->uSDA_Mode_Pin_Position = ;break;
case GPIO_PIN_3 : hIICx->uSDA_Mode_Pin_Position = ;break;
case GPIO_PIN_4 : hIICx->uSDA_Mode_Pin_Position = ;break;
case GPIO_PIN_5 : hIICx->uSDA_Mode_Pin_Position = ;break;
case GPIO_PIN_6 : hIICx->uSDA_Mode_Pin_Position = ;break;
case GPIO_PIN_7 : hIICx->uSDA_Mode_Pin_Position = ;break; }
}
4.3.4 起始信号
这里与3.1讲解的操作有点不同,就是3.1中最后没有将SCL拉低包括在内,而为了发送数据的方便,我也将SCL在此函数中拉低了。
void vIIC_Start_Signal(IIC_HandleTypedef * hIICx)
{ IIC_SDA_1 (hIICx); //拉高数据线
IIC_SCL_1 (hIICx); //拉高时钟线
vIIC_Delay_4us ( ); //延时
IIC_SDA_0 (hIICx); //拉低数据线
vIIC_Delay_4us ( ); //延时
IIC_SCL_0 (hIICx); //拉低时钟线
vIIC_Delay_4us ( ); //延时 }
4.3.5 结束信号
这里与3.2讲解的操作也有所不同,因为在数据接收完或者是发送完成后,SDA的电平不能确定,有可能是高也有可能是低电平,但在结束信号的时候,SDA需要是低电平时候拉低SCL才能作为结束信号的开始。
void vIIC_Stop_Signal(IIC_HandleTypedef * hIICx)
{ IIC_SDA_0 (hIICx); //拉低数据线
vIIC_Delay_4us ( ); //延时
IIC_SCL_1 (hIICx); //拉高时钟线
vIIC_Delay_4us ( ); //延时
IIC_SDA_1 (hIICx); //拉高数据线
vIIC_Delay_4us ( ); //延时 }

4.3.6 应答信号(ACK)
由于因为发送端和操作的不同,这里需要将ACK分成三种,①Ack(主动拉低SDA形成应答信号) ②NAck(主动不拉低SDA不形成应答信号) ③ReadAck(等待应答信号)。
①Ack(主动拉低SDA形成应答信号)
该信号在你没有读取到最后一个数据时由主机发送,使从机继续发送数据。
void vIIC_Ack(IIC_HandleTypedef * hIICx)
{ IIC_SDA_0 (hIICx); //拉低数据位
vIIC_Delay_2us ( ); //延时
IIC_SCL_1 (hIICx); //拉高时钟位
vIIC_Delay_4us ( ); //延时
IIC_SCL_0 (hIICx); //拉低时钟位
vIIC_Delay_2us ( ); //延时 }
②NAck(主动不拉低SDA不形成应答信号)
该信号在你读取完最后一个数据时由主机发送,使从机停止发送数据。
void vIIC_NAck(IIC_HandleTypedef * hIICx)
{ IIC_SDA_1 (hIICx); //SDA拉高 不应答对方
vIIC_Delay_2us ( );
IIC_SCL_1 (hIICx);
vIIC_Delay_4us ( );
IIC_SCL_0 (hIICx);
vIIC_Delay_2us ( ); }
③ReadAck(等待应答信号)
该信号在主机发送完数据后等待从机应答时候使用。
bool bIIC_ReadACK(IIC_HandleTypedef * hIICx) //返回为:=1有ACK,=0无ACK
{
IIC_GPIO_SDA_MODE_Ipt (hIICx); //将SDA的模式改成输入模式
IIC_SDA_1 (hIICx); //拉高数据线
vIIC_Delay_2us ( ); //延时
IIC_SCL_1 (hIICx); //拉高时钟线
vIIC_Delay_2us ( ); //延时 if(IIC_SDA_R(hIICx)) //判断是否成功接收应答,如‘有’返回0,‘没有’则返回1
{
IIC_SCL_0 (hIICx); //拉低时钟线
vIIC_Delay_2us ( ); //延时
IIC_GPIO_SDA_MODE_Opt(hIICx); //接收完应答后,将SDA的模式改回输出模式
return FALSE; //没有应答
}
else
{
IIC_SCL_0 (hIICx); //拉低时钟线
vIIC_Delay_2us ( ); //延时
IIC_GPIO_SDA_MODE_Opt(hIICx); //接收完应答后,将SDA的模式改回输出模式
return TRUE; //产生应答
} }


4.3.7 发送数据
所要发送的数据为8位,学过串口协议的应该知道按位发送,我们这里将要发送的数据进行由高到低位的一个顺序发送,具体操作如下,不懂的朋友可以将以下代码通过画图画出来,以方便理解。
void vIIC_SendByte(IIC_HandleTypedef * hIICx, uint8_t uSendByte)
{ uint8_t i; for (i=; i<; i++) //循环8次
{
if(uSendByte & 0X80) //将发送的数据最高位与1相与,若发送的数据最高位为1,则将SDA拉高,否则拉低
IIC_SDA_1 (hIICx);
else
IIC_SDA_0 (hIICx);
uSendByte <<= ; //数据左移1位
vIIC_Delay_2us ( ); //延时
IIC_SCL_1 (hIICx); //时钟线拉高
vIIC_Delay_4us ( ); //延时
IIC_SCL_0 (hIICx); //时钟线拉低
vIIC_Delay_2us ( ); //延时 } }
4.3.8 数据接收
具体操作都写在注释部分,在SCL高电平时候去读取SDA的电平。
uint8_t uIIC_RecvByte(IIC_HandleTypedef * hIICx)
{
uint8_t i,uReceiveByte = ; IIC_GPIO_SDA_MODE_Ipt(hIICx); //将SDA的模式设置为输入模式
IIC_SDA_1 (hIICx); //拉高数据线
for(i=;i<;i++) //进行8次的循环
{
uReceiveByte <<= ; //将接收到的数据左移 vIIC_Delay_2us ( ); //延时
IIC_SCL_1 (hIICx); //拉高时钟线
vIIC_Delay_2us ( ); //延时 if(IIC_SDA_R (hIICx)) //读取SDA电平
{
uReceiveByte |=0x01; //若SDA电平为高则将数据的最低位或上1,即为加1;若SDA电平为低,不进行该操作,则数据最低位为0
} vIIC_Delay_2us ( ); //延时
IIC_SCL_0 (hIICx); //拉低时钟线
vIIC_Delay_2us ( ); //延时
}
IIC_GPIO_SDA_MODE_Opt(hIICx); //将SDA的模式设置为输出模式 return uReceiveByte; }
5.结尾
I2C协议核心基本函数为以上,将所有的核心函数结合起来便可与传感器设备进行通信了,但本博客只是单纯讲解了I2C协议,并未与传感器进行通信,若理解完I2C协议后可前往下一章博客进行与传感器通信的实践。
对STM8的I2C协议讲解到这里结束,感谢各位看官的点击。
如果觉得有所收获请点下推荐,若认为该博客中存在错误的说明或者对博客中某方面有疑问请留言。
作 者:浩宇99✌
出 处:https://www.cnblogs.com/zhenghaoyu/p/10719233.html
版权声明:本文原创发表于 博客园,欢迎转载,但未经作者同意必须保留此段声明,且在文章页面明显位置给出原文连接,否则视为侵权。
基于STM8的IIC协议---STM8-第五章的更多相关文章
- 基于STM8的IIC协议--实例篇--时钟模块(DS3231)读取
1. 综述 由上篇博客可知道IIC协议如何用代码实现,本篇博客就不涉及协议内容,只讲解如何使用. 本次的实验传感为:DS3231(时钟模块),对于时钟模块的具体信息我也就不多介绍,大家可以自行度娘,具 ...
- 《机器学习实战(基于scikit-learn和TensorFlow)》第五章内容学习心得
本章在讲支持向量机(Support Vector Machine). 支持向量机,一个功能强大的机器学习模型,能够执行线性或非线性数据的分类.回归甚至异常值检测的任务.它适用于中小型数据集的分类. 线 ...
- stm8的IIC库的使用
一.前言 stm8是一款低功耗的MCU芯片,它具备stm32库函数和资源丰富的优势.也同时具有价格便宜,低功耗的特点.在一些项目中,能起到很好的作用.下面我介绍一下stm8的IIC硬件库函数驱动代码及 ...
- FPGA基础设计(四):IIC协议
很多数字传感器.数字控制的芯片(DDS.串行ADC.串行DAC)都是通过IIC总线来和控制器通信的.不过IIC协议仍然是一种慢速的通信方式,标准IIC速率为100kbit/s,快速模式速率为400kb ...
- (原创)巩固理解基于DS18B20的1-wire协议(MCU,经验)
1.Abstract 如前篇随笔所写,将以前遇到最难懂的两个部分重拾一下.前一篇写的是I2C协议(http://www.cnblogs.com/hechengfei/p/4117840.htm ...
- IIC协议建模——读写EEPROM
案例采用明德扬设计思想完成.IIC协议是非常常用的接口协议,在电子类岗位招聘要求中经常出现它的身影.关于IIC协议这里只做简要介绍,详细信息请自行百度或查阅相关Datasheet,网上资料非常多.该篇 ...
- 复习IIC协议---以AT24C02为例
1.总纲--复习IIC(inter integrated circuit)协议以及自己顺便读一下数据手册. /********************************************* ...
- Python网络编程02 /基于TCP、UDP协议的socket简单的通信、字符串转bytes类型
Python网络编程02 /基于TCP.UDP协议的socket简单的通信.字符串转bytes类型 目录 Python网络编程02 /基于TCP.UDP协议的socket简单的通信.字符串转bytes ...
- 基于GBT28181:SIP协议组件开发-----------第四篇SIP注册流程eXosip2实现(一)
原创文章,引用请保证原文完整性,尊重作者劳动,原文地址http://www.cnblogs.com/qq1269122125/p/3945294.html. 上章节讲解了利用自主开发的组件SIP组件l ...
随机推荐
- 阿里云上rabbitmq安装
环境:CentOS Linux release 7.4.1708 (Core) rabbitmq-server-3.7.13-1.el7.noarch.rpm 阿里云服务器 1.安装elang ...
- ISAPI筛选器及对ASP源文件的保护
ISAPI筛选器及对ASP源文件的保护 2009-04-21 01:45:57 标签:ISAPI 筛选器 ASP 源文件 保护 摘要:本文介绍了利用ISAPI筛选器保护ASP源文件的方法,并给出一个实 ...
- temporal credit assignment in reinforcement learning 【强化学习 经典论文】
Sutton 出版论文的主页: http://incompleteideas.net/publications.html Phd 论文: temporal credit assignment i ...
- element-ui隐藏组件scrollbar的使用
话不多说,直接上图 总结:el-scrollbar组件设置高度100%包裹住需要滚动的dom结构即可. 再例如: 至于配置props,参见源码https://github.com/ElemeFE/el ...
- android ui更新
UI只能在主线程中更新. Handler 首先在主线程中创建handler,这样handler是附件到主线程UI中. Handler normalHandler = new Handler() { @ ...
- hyperscan简单学习(2)
对hyperscan官方的前两个example进行编译和运行. 支持单个和多个正则编译.并行匹配规则,性能高. 对块模式和流模式使用: 示例pcapscan: http://www.cnblogs.c ...
- 免app下载笔趣阁小说
第一次更新:发现一个问题,就是有时候网页排版有问题的话容易下载到多余章节,如下图所示: 网站抽风多了一个正文一栏,这样的话就会重复下载1603--1703章节. 解决办法: 于是在写入内容前加了一个章 ...
- 简述at和crontab命令
at 在指定时间执行相关命令 用法:at [option] TIME 常用选项: -l:查询等待运行作业的队列 -d:删除作业,加作业号 -q QUEVE: -c :查看具体作业任务: -f /pat ...
- 一个权重的物体拷贝权重给多个(oneWeightToMany)
你是否在做项目的时候经常会遇见一个物体带权重需要拷贝给其他物体,这时候其他物体多的数不胜数 你怎么办呢? 举例:假如一头狮子 身体你已经做好了,但是模型师把半个身体都做满了垂落的实体模型毛发,你是否感 ...
- Python之面向对象和正则表达(代数运算和自动更正)
面向对象 一.概念解释 面对对象编程(OOP:object oriented programming):是一种程序设计范型,同时也是一种程序开发的方法,实现OOP的程序希望能够在程序中包含各种独立而又 ...