【Duke-Image】Week_4 Image restoration
Chapter 5 Image Restoration and Reconstruction 图像复原与重建
5.1 A Model of the Image Defradation/Restoration Process 图像退化/复原过程的模型
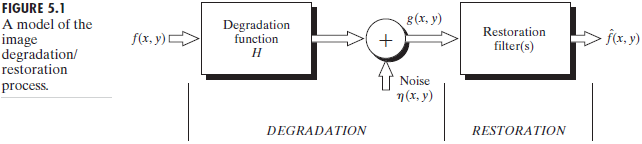
As Fig.5.1 shows,the degradation process is modeled as a degradation function (退化函数) with an additive noise term (加性噪声) ,operates on an input image \(f(x,y)\) to produce a degraded image \(g(x,y)\).Given \(g(x,y)\) ,some knowledge about the degradation function and the additive noise term \(\eta(x,y)\),the objective of restoration is to obtain an estimate \(\hat{f}(x,y)\)
通过退化后的图像\(g(x,y)\)以及退化函数和噪声获得原始图像的一个估计。
If H is a linear,position-invariant process,then the degrade image is given in the spatial domain by
\[ g(x,y) = h(x,y) * f(x,y) + \eta(x,y) \]
write the model in an equivalent frequency domain representation(use Fourier Transform):
\[ G(u,v) = H(u,v)F(u,v) + N(u,v) \]
乘性噪声通过取对数的方式可以转换为加性噪声,故主要分析加性噪声的相关特性。
5.2 Noise Models 噪声模型
5.2.1 Spatial and Frequency Properties of Noise 噪声的空间和频率特性
white noise(白噪声),a random signal with a constant power spectral density 功率谱密度为常数的随机信号。理想的白噪声拥有无限大的带宽,实际中,我们常常将有限带宽的平整信号视为白噪声。
5.2.2 Some Important Noise Probability Density Functions 噪声概率密度函数
The spatial noise descriptor with which we shall be concerned is the statistical behavior of the intensity values in the noise component of the model in Fig.5.1.These may be considered random variables,characterized by a probability density function(PDF).
考虑噪声分量的灰度值统计特性(由概率密度函数PDF表征的随机变量)
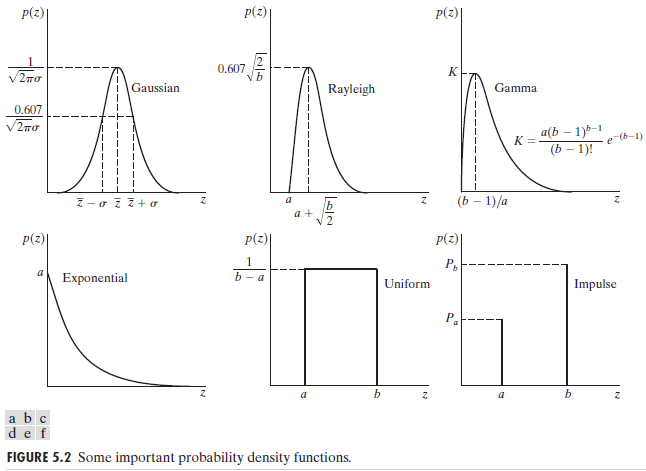
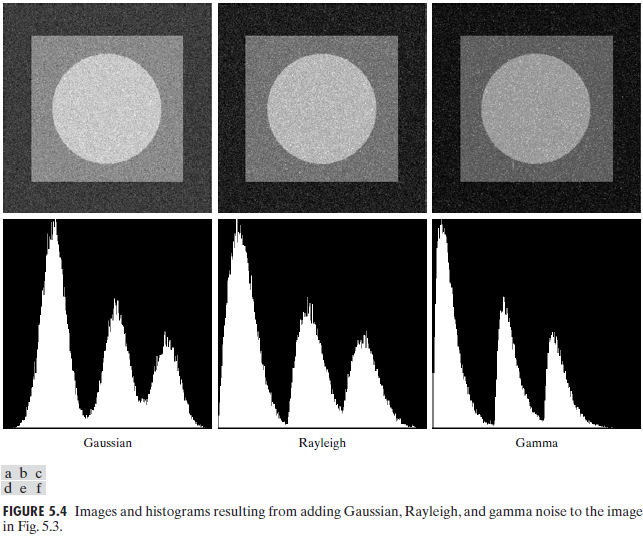
Gaussian noise 高斯噪声
also called normal noise (正态噪声),with mathematical tractability (数学上的易处理性)
The PDF of a Gaussian random variable,z,is given by
\[ p(z) = \frac{1}{\sqrt{2\pi}\sigma}e^{-(z-\bar{z})^2/{2\sigma^2}} \]
where \(z\) represents intensity,\(\bar{z}\) is the mean(average) value of \(z\), and \(\sigma\) is its standard deviation.The standard deviation squard,\(\sigma^2\),is called the variance of z.
\(z\) 表示灰度值, \(\bar{z}\)表示\(z\)的平均值, \(\sigma\)表示\(z\)的标准差, 标准差的平方\(\sigma^2\)称为\(z\)的方差。
Rayleigh noise 瑞利噪声
The PDF of Rayleigh noise is given by
\[ p(z) =
\begin{cases}
\frac{2}{b}(z-a)e^{-(z-a)^2/b} & \text{for $z\ge a$} \\
\\
\,0 & \text{for $z\lt a$}
\end{cases} \]
The mean and variance of this density are given by
\[ \quad\,\,\bar{z} = a + \sqrt{\pi b/4} \] \[ \sigma^2 = \frac{b(4-\pi)}{4} \]
Erlang(gamma) noise 爱尔兰(伽马)噪声
The PDF of Gamma noise is given by
\[ p(z) =
\begin{cases}
\frac{a^bz^{b-1}}{(b-1)!}e^{-az} & \text{for $z\ge 0$} \\
\\\\
\;0 &\text{for $z\lt 0$}
\end{cases}
\]
The mean and variance of this density are given by
\[ \bar{z} = \frac{b}{a} \] \[ \sigma^2 = \frac{b}{a^2} \]
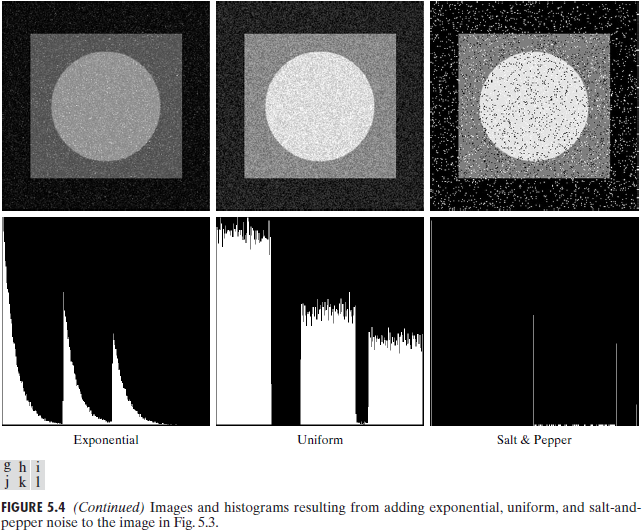
Exponential noise 指数噪声
The PDF of exponential noise is given by
\[ p(z) =
\begin{cases}
ae^{-az} & \text{ for $z \ge 0$} \\\\
0 &\text{ for $z<0$}
\end{cases}
\]
where $ a > 0 $. The mean and variance of this density function are
\[ \bar{z} = \frac{1}{a} \] \[ \sigma^2 = \frac{1}{a^2} \]
Uniform noise 均匀噪声
The PDF of uniform noise is given by
\[ p(z) =
\begin{cases}
\frac{1}{b-a} & \text{ if $a\le z \le b$} \\\\
\,0 &\text{otherwise}
\end{cases}
\]
The mean and variance of this density function are
\[ \bar{z} = \frac{a+b}{2} \] \[ \sigma^2 = \frac{(b-a)^2}{12} \]
Impulse (salt-and-pepper) noise 椒盐噪声
The PDF of exponential noise is given by
\[ p(z) =
\begin{cases}
P_a & \text{for $ z=a $} \\\\
P_b & \text{for $ z=b $} \\\\
1-P_a-P_b & \text{otherwise}
\end{cases}
\]
5.2.3 Periodic Noise 周期噪声
Periodic noise in an image arises typically from electrical or electromechanical interference during image acquisition.As discussed in Section 5.4,periodic noise can be reduced significantly via frequency domain filtering.
一幅图像中的周期噪声是在图像获取期间由电力或机电干扰产生的。周期噪声可以通过频率域滤波来显著减少。具体讨论见5.4节。
5.2.4 Estimation of Noise Parameters 噪声参数的估计
estimate the parameters of the PDF from small patches of reasonably constant background intensity.根据有着合理恒定灰度值的一小部分来估计PDF的参数。
考虑由S表示的一个子图像,并令\(p_s(z_i),i=0,1,2,...,L-1\)表示S中像素灰度的概率估计(归一化直方图值),其中L是整个图像中可能的灰度值(例如,对于8比特图像,L为256)。S的均值和方差。计算如下
\[ \bar{z} = \sum_{i=0}^{L-1}z_ip_s(z_i) \] \[ \sigma^2 = \sum_{i=0}^{L-1}(z_i-\bar{z})^2p_s(z_i) \]
5.3 Restoration in the Presence of Noise Only-Spatial Filtering 只存在噪声的复原-空间滤波
When the only degradation present in than image is noise,当图像中只有噪声引起的退化(忽略退化函数)时,we have
\[ g(x,y) = f(x,y) + \eta(x,y) \] \[ G(u,v) = F(u,v) + N(u,v) \]
假设\(\hat{f}(x,u=y)\)为对图像的估计,则\(|\hat{f}(x,y)-g(x,y)|^2\)应该尽可能与已知的噪声分布一致,由此得出合理的估计值。
5.6 Estimating the Degradation Function 估计退化函数
5.6.1 Estimation by Image Observation 图像观察估计
根据$ g(x,y) = f(x,y) * h(x,y) + \eta(x,y) $,暂时忽略噪声,对该式作Fourier Transform,得到: $ G(u,v) = F(u,v) H(u,v) $ 故有 \[ H(u,v) = \frac{G(u,v)}{F(u,v)} \]
5.6.2 Estimation by Experimentation 试验估计
通过试验,找到与获取退化图像设备相似的装置,从而得到一个准确的退化估计。
根据$ g(x,y) = f(x,y) * h(x,y) \(,(忽略噪声),当\)f(x,y)\(为一个冲激函数\)\delta(x,y)\(时,卷积得到的\)g(x,y)\(就是\)h(x,y)$。
使用相同的系统对一个冲激(小亮点)成像,得到退化的冲激响应。
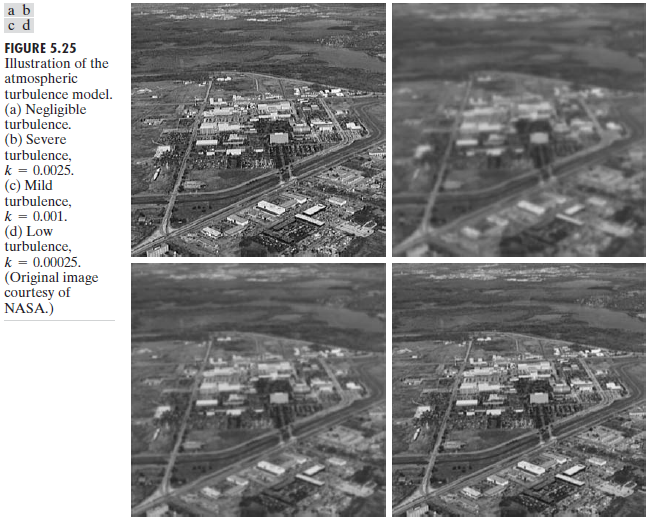
5.6.3 Estimation by Modeling 建模估计
1、Turbulence (湍流模型),该模型通用形式为:
\[ H(u,v) = e^{-k(u^2+v^2)^{5/6}} \] \(k\) 是和湍流性质有关的常数。
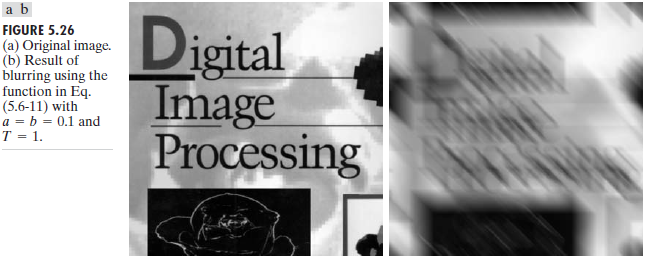
2、Motion blurring (运动模糊)。假设图象想 \(f(x,y)\) 进行平面运动,\(x_0(t)\) 和 \(y_0(t)\) 分别是在 \(x\) 和 \(y\) 方向上随时间变化的分量,\(T\) 为曝光时间,\(g(x,y)\) 为模糊后的图像,则有
\[ g(x,y) = \int_0^Tf[x-x_0(t),y-y_0(t)]dt \]
上式经Fourier Transform,得到
\[ G(u,v) = H(u,v)\,F(u,v) \]
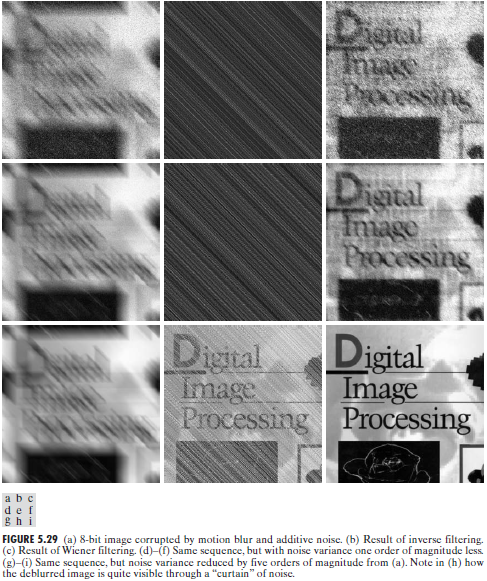
5.7 Inverse Filtering 逆滤波
通过退化图形的傅里叶变换 \(G(u,v)\) 与退化函数 \(H(u,v)\) 之比来计算原始图像的傅里叶变换的估计 \(\hat{F}(x,y)\) ,即
\[ \hat{F}(u,v) = \frac{G(u,v)}{H(u,v)} \]
又有 \(G(u,v) = H(u,v)F(u,v) + N(u,v)\) ,代入上式,有
\[ \hat{F}(u,v) = F(u,v) + \frac{N(u,v)}{H(u,v)} \]
因为 \(N(u,v)\) 未知,所以即使知道退化函数,也并不能准确的复原图像。另外,如果退化函数是零或者非常小的值,则分式项值会非常大,很容易支配估计值 \(\hat{F}(u,v)\)。因此,直接逆滤波的性能是很差的,下面提到的维纳滤波器就是很好的改进方法。
5.8 Minimum Mean Square Error (Wiener) Filtering 最小均方差(维纳)滤波
该方法建立在图像和噪声都是随机变量的基础上,目标是找到未污染图像 \(f\) 的一个估计 \(\hat{f}\) ,使它们之间的均方误差最小。这种误差度量由下式给出
\[ e^2 = E\,\{(f-\hat{f})^2\} \]
其中,\(E\{\cdot\}\)是参数的期望值。该误差函数的最小值在频率域中由如下表达式给出(最常用的近似式)
\[ \hat{F}(u,v) = \left[\frac{1}{H(u,v)}\frac{|H(u,v)|^2}{|H(u,v)|^2+K}\right]G(u,v) \]
直接逆滤波和维纳滤波效果对比
【Duke-Image】Week_4 Image restoration的更多相关文章
- hdu1540 Tunnel Warfare【线段树】
During the War of Resistance Against Japan, tunnel warfare was carried out extensively in the vast a ...
- 【SR汇总】基于深度学习方法
1.SRCNN.FSRCNN (Learning a Deep Convolutional Network for Image Super-Resolution, ECCV2014) (Acceler ...
- 【AR实验室】mulberryAR : ORBSLAM2+VVSION
本文转载请注明出处 —— polobymulberry-博客园 0x00 - 前言 mulberryAR是我业余时间弄的一个AR引擎,目前主要支持单目视觉SLAM+3D渲染,并且支持iOS端,但是该引 ...
- 【.net 深呼吸】细说CodeDom(1):结构大观
CodeDom 是啥东东?Html Dom听过吧,XML Dom听过吧.DOM一般可翻译为 文档对象模型,那 Code + DOM呢,自然是指代码文档模型了.如果你从来没接触过 CodeDom,你大概 ...
- 【Machine Learning】KNN算法虹膜图片识别
K-近邻算法虹膜图片识别实战 作者:白宁超 2017年1月3日18:26:33 摘要:随着机器学习和深度学习的热潮,各种图书层出不穷.然而多数是基础理论知识介绍,缺乏实现的深入理解.本系列文章是作者结 ...
- 【前端性能】高性能滚动 scroll 及页面渲染优化
最近在研究页面渲染及web动画的性能问题,以及拜读<CSS SECRET>(CSS揭秘)这本大作. 本文主要想谈谈页面优化之滚动优化. 主要内容包括了为何需要优化滚动事件,滚动与页面渲染的 ...
- 【深入浅出jQuery】源码浅析--整体架构
最近一直在研读 jQuery 源码,初看源码一头雾水毫无头绪,真正静下心来细看写的真是精妙,让你感叹代码之美. 其结构明晰,高内聚.低耦合,兼具优秀的性能与便利的扩展性,在浏览器的兼容性(功能缺陷.渐 ...
- 【.net 深呼吸】程序集的热更新
当一个程序集被加载使用的时候,出于数据的完整性和安全性考虑,程序集文件(在99.9998%的情况下是.dll文件)会被锁定,如果此时你想更新程序集(实际上是替换dll文件),是不可以操作的,这时你得把 ...
- 【.net 深呼吸】跨应用程序域执行程序集
应用程序域,你在网上可以查到它的定义,凡是概念性的东西,大伙儿只需要会搜索就行,内容看了就罢,不用去记忆,更不用去背,“名词解释”是大学考试里面最无聊最没水平的题型. 简单地说,应用程序域让你可以在一 ...
随机推荐
- make命令以及makefile
make命令以及makefile使用RCS与CVS进行源代码控制编写手册页使用patch与tar发布软件开发环境 多源代码的问题 当我们编写小程序时,许多人都是简单的在编辑后通过重新编译所有的文件重新 ...
- centos7 卸载openJDK 安装jdk7
[root@cms02 root]# rpm -qa | grep jdk java--openjdk-headless-1.7.0.75-2.5.4.2.el7_0.x86_64 java--ope ...
- Linux:-杀进程的技巧
<---kill进程的技巧---> 1.杀掉某个关键字的进程 pgrep -f 2.批量杀掉某个关键字的进程 pkill - "name" 3.批量杀掉多个关键字的进程
- android使用默认程序进行图片拍照已经裁剪,以及设备读取
//代码如下: package com.cbsw.yulechangsuo.activity; import java.io.File;import java.io.FileInputStream;i ...
- error: could not read CFBundleIdentifier from Info.plist (null)解决方法之一
出现这种错误的原因可能很多,以下是我遇到的一种情况: 项目移植到新的环境 编译报错: error: could not read CFBundleIdentifier from Info.plist ...
- What technical details should a programmer of a web application consider before making the site public?
What things should a programmer implementing the technical details of a web application consider bef ...
- TensorFlow白皮书
TensorFlow [1] is an interface for expressing machine learning algorithms, and an implementation for ...
- 首师大附中科创教育平台 我的刷题记录 0304 50095106扔核弹(XDC,你懂的)
今天给大家献上"C"级题:50095106扔核弹(XDC,你懂的)!! 试题编号:0304 50095106扔核弹(XDC,你懂的) 难度级别:C: 运行时间限制:1000ms ...
- js 单例模式笔记
单例指一个类只有一个实例,这个类自行创建这个实例. 利用对象字面量直接生成一个单例: var singleton = { prop: 1, method: function(){ console.lo ...
- queen8
八皇后问题 八皇后问题的数学模型:如何能够在 8×8 的国际象棋棋盘上放置八个皇后,使得任何一个皇后都无法直接吃掉其他的皇后?为了达到此目的,任两个皇后都不能处于同一条横行.纵行或斜线上.八皇后问题可 ...