吴裕雄--天生自然神经网络与深度学习实战Python+Keras+TensorFlow:Bellman函数、贪心算法与增强性学习网络开发实践
!pip install gym

import random
import numpy as np
import matplotlib.pyplot as plt
from keras.layers import Dense, Dropout, Activation
from keras.models import Sequential
from keras.optimizers import Adam
from keras import backend as K
from collections import deque
import gym #选取互动环境
env = gym.make('CartPole-v1')
state = env.reset()
#0或1表示让小车向不同方向移动
action = 0
#step(action)表示想环境发生命令
new_state, reward, done , info = env.step(action)
print((new_state, reward, done, info))

import random
import numpy as np
import matplotlib.pyplot as plt
from keras.layers import Dense, Dropout, Activation
from keras.models import Sequential
from keras.optimizers import Adam
from keras import backend as K
from collections import deque
import gym
#选取互动环境
env = gym.make('FrozenLake-v0')
state = env.reset()
env.render()
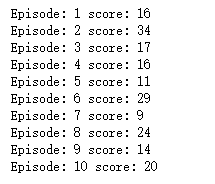
def random_actions_game(episodes):
for episode in range(episodes):
state = env.reset()
score = 0
done = False
while not done:
#随机向环境发生命令
action = random.choice([0, 1])
new_state, reward, done, info = env.step(action)
score += 1
print('Episode: {} score: {}'.format(episode + 1, score)) random_actions_game(10)
env = env.unwrapped
#环境状态点数量
print(env.observation_space.n)
#可采取的行动数量
print(env.action_space.n)
#在每个节点采取四种行动的概率
print(env.P)
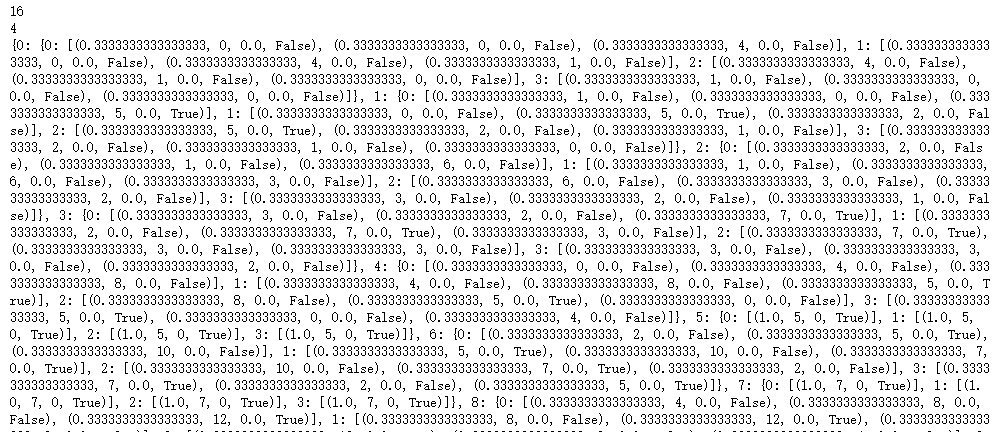
print(env.P[14][1])

#初始化所有状态点为0
value_of_table = np.zeros(env.observation_space.n)
#设置循环更新最大次数
no_of_iteration = 100000
def value_iteration(env, gamma = 1.0):
#设定阈值
threshold = 1e-20 for i in range(no_of_iteration):
updated_value_of_table = np.copy(value_of_table)
#根据公式(8)循环更新每个节点值
for state in range(env.observation_space.n):
Q_value = []
#计算在给的状态点采取所有行动后可获得的最大值
for action in range(env.action_space.n):
next_states_rewards = []
for next_sr in env.P[state][action]:
trans_prob, next_state, reward, _ = next_sr
#根据公式(8)计算回报
next_states_rewards.append((trans_prob * (reward + gamma * updated_value_of_table[next_state]))) Q_value.append(np.sum(next_states_rewards)) #更新状态节点值
value_of_table[state] = max(Q_value)
#检测前后两次迭代状态点的值变化是否在阈值范围内
if np.sum(np.fabs(updated_value_of_table - value_of_table)) <= threshold:
print("interation finished : %d" % (i+1))
break return value_of_table
optimal_value_table = value_iteration(env=env, gamma = 1.0)

def extract_policy(value_table, gamma = 1.0):
policy = np.zeros(env.observation_space.n) for state in range(env.observation_space.n):
Q_table = np.zeros(env.action_space.n)
#根据当前各状态点的最优值,计算采取不同行动所得分值
for action in range(env.action_space.n):
for next_sr in env.P[state][action]:
trans_prob, next_state, reward, _ = next_sr
Q_table[action] += (trans_prob * (reward + gamma * value_table[next_state]))
#把能获得最大回报的行动当做当前状态
policy[state] = np.argmax(Q_table) return policy
optimal_policy = extract_policy(optimal_value_table, gamma = 1.0)
print(optimal_policy)

gamma = 0.95
epsilon = 1.0
epsilon_min = 0.01
epsilon_decay = 0.99 deque_len = 20000
#我们的目标是训练网络能在一个episode中获得200分
target_score = 200
episodes = 2000
batch_size = 64
optimizer = 'adam'
loss = 'mse'
#构建参与环境互动的网络
def agent(states, actions):
model = Sequential()
model.add(Dense(16, input_dim = states))
model.add(Activation('relu'))
model.add(Dense(16))
model.add(Activation('relu'))
model.add(Dense(16))
model.add(Activation('relu'))
#网络最后输出两种结果,分别对应在当前状态下采取对应行动时所得最终回报
model.add(Dense(actions))
model.add(Activation('linear'))
return model
'''
根据epsilon贪婪算法,对于给定epsilon,在[0,1]内构造一个随机数,如果随机数的值比epsilon小,那么
我们随机在两种行动中选择一种,如果比episilon大,我们让网络来决定当前状态
'''
def agent_action(model, epsilon, state, actions):
if np.random.rand() <= epsilon:
#随机在两种行动中选一种
act = random.randrange(actions)
else:
act = np.argmax(model.predict(state)[0])
return act
training_data = deque(maxlen = deque_len) def memory(state, new_state, reward, done, action):
training_data.append((state, new_state, reward, done, action))
def performance_plot(scores, target_score):
scores_arr = np.array(scores)
scores_arr[np.where(scores_arr > target_score)] = target_score
plt.figure(figsize = (20, 5))
plt.title('Plot of Score v/s Episode')
plt.xlabel('Episodes')
plt.ylabel('Scores')
plt.plot(scores_arr)
plt.show()
'''
将状态点,行动,环境反馈,下一个状态点等信息存储在队列里,输入网络,让网络识别如何在给定状态的中选择
合适的行动
'''
def replay_back(epsilon, gamma, epislon_min, epsilon_decay, model, training_data,
batch_size = 64):
idx = random.sample(range(len(training_data)), min(len(training_data), batch_size))
train_batch = [training_data[j] for j in idx]
for state, new_state, reward, done, action in train_batch:
target = reward
'''
在当前状态(state)采取给定行动(action),进入下一个状态(next_state),
如果next_state不是终止状态,那意味着在在当前状态state采取给定行动action是正确的,
于是我们根据Bellman函数迭代更新当前状态采取给定行动后的回报,然后训练网络识别状态点,行动
以及回报之间存在的关系,然后根据这种训练后的能力去识别新状态点在采取不同行动后的回报
'''
if not done:
#bellman函数迭代状态点执行给定行动后的回报
target = reward + gamma * np.amax(model.predict(new_state)[0])
target_f = model.predict(state)
#修正网络在给定状态下对给定行动后回报的预测
target_f[0][action] = target
#让网络重新识别给定状态采取给定行动后所得回报间的联系
model.fit(state, target_f, epochs = 1, verbose = 0)
if epsilon > epsilon_min:
#不断缩小epsilon的值,这样在agent_action中会更多的让网络做出决策
epsilon *= epsilon_decay
return epsilon
def train(target_score, batch_size, episodes, optimizer, loss, epsilon,
gamma, epsilon_min, epsilon_decay, actions):
print('---training---')
K.clear_session()
scores = []
model = agent(states, actions)
model.compile(loss = loss, optimizer = optimizer) for episode in range(1, episodes + 1):
state = env.reset()
#转换成1*4向量
state = state.reshape(1, states)
done = False
time_step = 0
while not done:
#使用贪婪算法获得行动类型
action = agent_action(model, epsilon, state, actions)
new_state, reward, done, info = env.step(action)
'''
如果当前行动导致的下个状态是终止状态,就如同并东湖问题中的窟窿,因此它对应的回报要对应负值
'''
reward = reward if not done else -10
new_state = new_state.reshape(1, states)
#把状态转换信息存储起来用于训练网络
memory(state, new_state, reward, done, action)
state = new_state
time_step += 1 #将当前状态转换信息去训练网络
epsilon = replay(epsilon, gamma, epsilon_min, epsilon_decay, model,
training_data)
scores.append(time_step)
if episode % 100 == 0:
print('episod {}, socre {}, epsilon{:4}'.format(episode, time_step,
epsilon))
print('Avg Score over last 100 epochs', sum(scores[-100:])/100)
if sum(scores[-100: ])/100 > target_score:
print('----Goal Achived After {} Episodes------'.format(episode))
performance_plot(scores, target_score)
break
model.save('/content/gdrive/My Drive/CartPole.h5')
return model
from google.colab import drive
drive.mount('/content/gdrive')

env = gym.make('CartPole-v1')
seed_val = 456
np.random.seed(seed_val)
env.seed(seed_val)
random.seed(seed_val)
states = env.observation_space.shape[0]
actions = env.action_space.n
training_data = deque(maxlen=deque_len)
model = train(target_score=target_score, batch_size=batch_size,
episodes=episodes, optimizer=optimizer, loss=loss,
epsilon=epsilon, gamma=gamma, epsilon_min=epsilon_min,
epsilon_decay=epsilon_decay, actions=actions)

吴裕雄--天生自然神经网络与深度学习实战Python+Keras+TensorFlow:Bellman函数、贪心算法与增强性学习网络开发实践的更多相关文章
- 吴裕雄--天生自然神经网络与深度学习实战Python+Keras+TensorFlow:使用TensorFlow和Keras开发高级自然语言处理系统——LSTM网络原理以及使用LSTM实现人机问答系统
!mkdir '/content/gdrive/My Drive/conversation' ''' 将文本句子分解成单词,并构建词库 ''' path = '/content/gdrive/My D ...
- 吴裕雄--天生自然神经网络与深度学习实战Python+Keras+TensorFlow:TensorFlow与神经网络的实现
import tensorflow as tf import numpy as np ''' 初始化运算图,它包含了上节提到的各个运算单元,它将为W,x,b,h构造运算部件,并将它们连接 起来 ''' ...
- 吴裕雄--天生自然神经网络与深度学习实战Python+Keras+TensorFlow:RNN和CNN混合的鸡尾酒疗法提升网络运行效率
from keras.layers import model = Sequential() model.add(embedding_layer) #使用一维卷积网络切割输入数据,参数5表示每各个单词作 ...
- 吴裕雄--天生自然神经网络与深度学习实战Python+Keras+TensorFlow:LSTM网络层详解及其应用
from keras.layers import LSTM model = Sequential() model.add(embedding_layer) model.add(LSTM(32)) #当 ...
- 吴裕雄--天生自然 神经网络人工智能项目:基于深度学习TENSORFLOW框架的图像分类与目标跟踪报告(续四)
2. 神经网络的搭建以及迁移学习的测试 7.项目总结 通过本次水果图片卷积池化全连接试验分类项目的实践,我对卷积.池化.全连接等相关的理论的理解更加全面和清晰了.试验主要采用python高级编程语言的 ...
- 吴裕雄--天生自然 pythonTensorFlow图形数据处理:windows操作系统删除tensorflow
输入:pip uninstall tensorflow Proceed(y/n):y
- 吴裕雄--天生自然HADOOP学习笔记:hadoop集群实现PageRank算法实验报告
实验课程名称:大数据处理技术 实验项目名称:hadoop集群实现PageRank算法 实验类型:综合性 实验日期:2018年 6 月4日-6月14日 学生姓名 吴裕雄 学号 15210120331 班 ...
- 吴裕雄--天生自然Numpy库学习笔记:NumPy Matplotlib
Matplotlib 是 Python 的绘图库. 它可与 NumPy 一起使用,提供了一种有效的 MatLab 开源替代方案. 它也可以和图形工具包一起使用,如 PyQt 和 wxPython. W ...
- 吴裕雄--天生自然HADOOP操作实验学习笔记:hbase的javaAPI应用
实验目的 进一步了解hbase的操作 熟悉使用IDEA进行java开发 熟悉hbase的javaAPI 实验原理 前面已经了解通过hbase的shell操作hbase,确实比较难以使用,另外通过hiv ...
随机推荐
- turtleh海龟库
Turtle海龟库 导入 import turtle turtle.setup(width,height,startx,starty) -setup():设置窗体的位置和大小 相对于桌面的起点的坐标以 ...
- two pointers思想 ---- 利用两个i, j两个下标,同时对序列进行扫描,以O(n)复杂度解决问题的一种思想
two pointers思想 ---- 利用两个i, j两个下标,同时对序列进行扫描,以O(n)复杂度解决问题的一种思想, 如果能用这种思想解决问题,那么会大大降低程序的复杂度. 两个利用这个思想的例 ...
- 题解 CF712C 【Memory and De-Evolution】
看到题我第一反应就是while循环 但是我竟然想正着推,失败,卡了十几分钟 后来我回来看到第三组测试数据 想到倒推 但是没坚持 于是我又卡了很久 过会我又回来想 AC了... 这个故事告诉我们,要努力 ...
- Illegal target for the requested operation
org.tigris.subversion.javahl.ClientException: Illegal target for the requested operation svn: Commit ...
- (转)KMP算法
转自:http://blog.csdn.net/yutianzuijin/article/details/11954939 我们首先用一个图来描述kmp算法的思想.在字符串O中寻找f,当匹配到位置i时 ...
- Docker+JMeter单机版+Nginx
基于JMeter5.1.1+Nginx1.12.2JMeter发起压测 Nginx作为文件服务器 一.目录结构: Dockerfile文件: FROM ubuntu:18.04# 基础镜像 MAIN ...
- java 数字转换格式化
1.小数格式化后转字符串百分数(带%)输出 NumberFormat nt = NumberFormat.getPercentInstance(); //设置百分数精确度2即保留两位小数 nt.set ...
- 安装Elasticsearch出现 node validation exception 的问题处理
es报错如下: [2019-10-11T16:23:28,945][ERROR][o.e.b.Bootstrap ] [es-node-1] node validation exception[3] ...
- CentOS 7 1810版本不能使用yum 命令
使用yum install httpd 命令安装Apache 提示错误 annot find a valid baseurl for repobase7x86_64 解决方法: 进入 ls命令寻找类似 ...
- 【vue】 router.beforeEach
import store from '@/store' const Vue = require('vue') const Router = require('vue-router') Vue.use( ...