【论文阅读】TRO 2021: Fail-Safe Motion Planning for Online Verification of Autonomous Vehicles Using Convex Optimization
参考与前言
Last edited time: August 3, 2022 10:04 AM
Status: Reading
Type: TRO
Year: 2021
论文链接:https://ieeexplore.ieee.org/document/9302873
1. Motivation
safe motion planning对自动驾驶很重要,其中online verification 能保证自动驾驶车辆不会出现事故,但是现有的方法存在下列缺点:
- online verification并不高效,一般需要20HZ或更高的频率
- 在一些极端的情况下 全时间段内不能完全避免碰撞
- 在不安全场景,大多方法都缺少提供alternative motion plans
Related work
因聪明需要 所以总结了一下,感兴趣可看,大致了解一下无人车的规划相关工作
trajectory planning
discrete planning比较受欢迎,主要是离散化搜索空间、状态和输入空间等,motion primitives主要就是提前计算好轨迹快,然后通过search-based方案concatenaated到一起,这一步骤通常是offline的,所以可以应用于较为复杂的车辆模型,比如multibody modesl[19]
OS: 估计是将轨迹点预录下来的形式,或者建完图后有free的全局轨迹点 搜素空间
- Sampling-based: RRT为主的,比较适合高维的搜索空间,但是由于随机采样,通常无法在时间内获得optimal motion
- Graph-search: 比如state lattices,同属discrete planning。获取一系列轨迹,其goal states是预定义好的grid上的点,使用 lattice 结构表示。state lattices使用了优化来实现jerk-optimal。通常lattices能构建 可行驶的轨迹,但是 due to grid, it lack optimality and completeness
虽然discrete planning是比较容易实现并有效的解决motion问题的,但是缺点也很明显:也正是因为离散,所以可能在safety-critical scenarios with small and convoluted solution spaces 无法求解;同样的原因 也会导致在fail to determine trajectories ending in small safe terminal sets
故连续的model predictive control通过minimizing cost function 来生成无碰撞的轨迹,比如混合整数优化、sequential quadratic programs;因为求解的问题通常是非凸的,所以求解起来较为困难无法做到实时性;另一个则是可能造成local minimal
通常可以把非凸问题转成凸问题,比如线性化 vehicle dynamics,将motion分为横向和纵向的;[47]-[51] 说明了这一方法可以在全局收敛的情况下有效解决优化问题;但因为方法上分横纵,可能导致无法在复杂场景下获得可行轨迹。我们通过focusing on simple evasive maneuvers and providing safe fallback solutions来解决这一问题 → 对应Section VI.
safety verification
In theorem proving, desired system properties are formulated using logical formulas,然后verification步骤主要是checking the satisfiability of the logical formulas
如果从未进入inevitable collision states 则认为是安全的,ICS是一种状态:所有车辆自身可能的轨迹都会和障碍物相撞,ICS reason over infinite time horizons,在随机的交通场景 确定ICS是比较耗时的,大部分工作为提高效果,仅考虑其他参与者的一条轨迹。
为补充ICS,controlled invariant sets 保证了persistent feasibility,根据定义就是根据其他参与者,如果在CIS内的每个状态都存在一个无碰撞轨迹,则说明车辆是安全的。因为对障碍物未来状态的未知,计算CIS在动态环境中比较challenging
Set-based reachability analysis 通过计算所有的feasible轨迹,检查是否存在无碰撞轨迹;但是这一方法中,因为对未来所有的可能状态进行考虑,unsafe regions may grow rapidly。 导致的结果就是 刚规划的轨迹会被人为potentially unsafe,leaving AV without a safe trajectory. 在本篇文章中,我们通过结合fail-safe planning来结合reachable sets在verficiation中以解决这一问题
responsibility-sensible safety RSS 也是一种formal safety model
Contribution
主要贡献是展示了一种 verification technique 来保证车辆的安全性 弥补上面提到的以下不足,从上面抽取出来的:
- 相关规划在方法上分横纵,可能导致无法在复杂场景下获得可行轨迹。本文通过focusing on simple evasive maneuvers and providing safe fallback solutions来解决这一问题 → 对应Section VI.
- 计算CIS在动态环境中比较challenging
- 因为对未来所有的可能状态进行考虑,unsafe regions may grow rapidly。 导致的结果就是 刚规划的轨迹会被人为potentially unsafe,leaving AV without a safe trajectory
2. Method
首先定义了问题,及 相关sets,这一部分有点多,建议看原文,主要是介绍所有变量的意义等,定义了set Z R^1 是自车的possible disturbances z,运动的微分公式为:
\]
使用 \(\chi\left(t_{h}, x\left(t_{0}\right), u\left(\left[t_{0}, t_{h}\right]\right)\right)\) 来表示 此公式的解,也就是满足motion下的轨迹集合
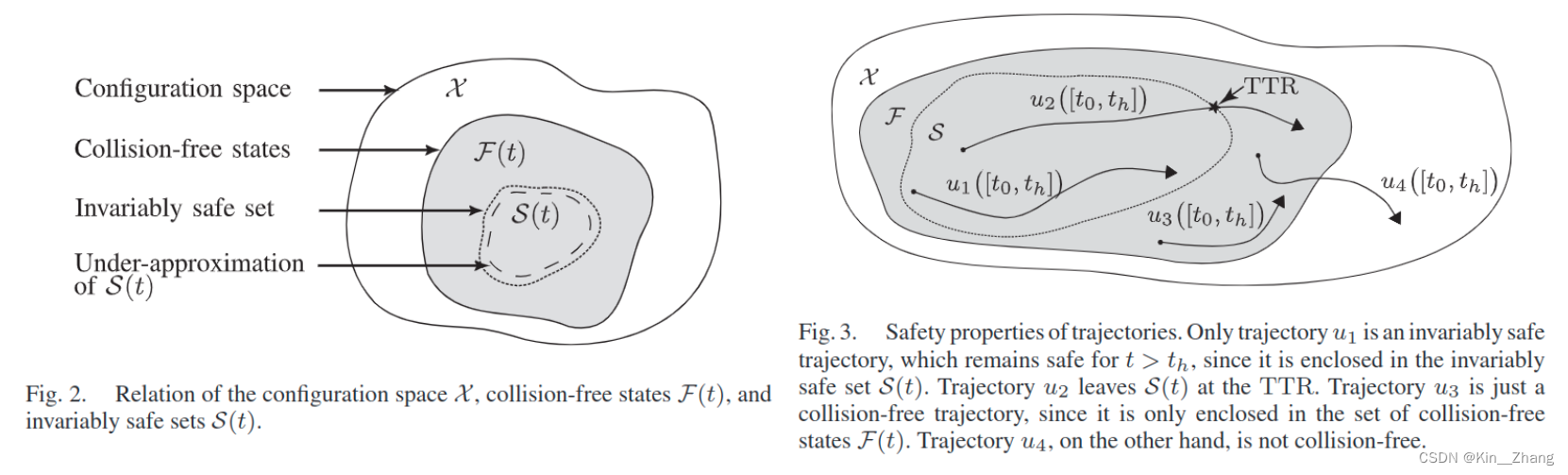
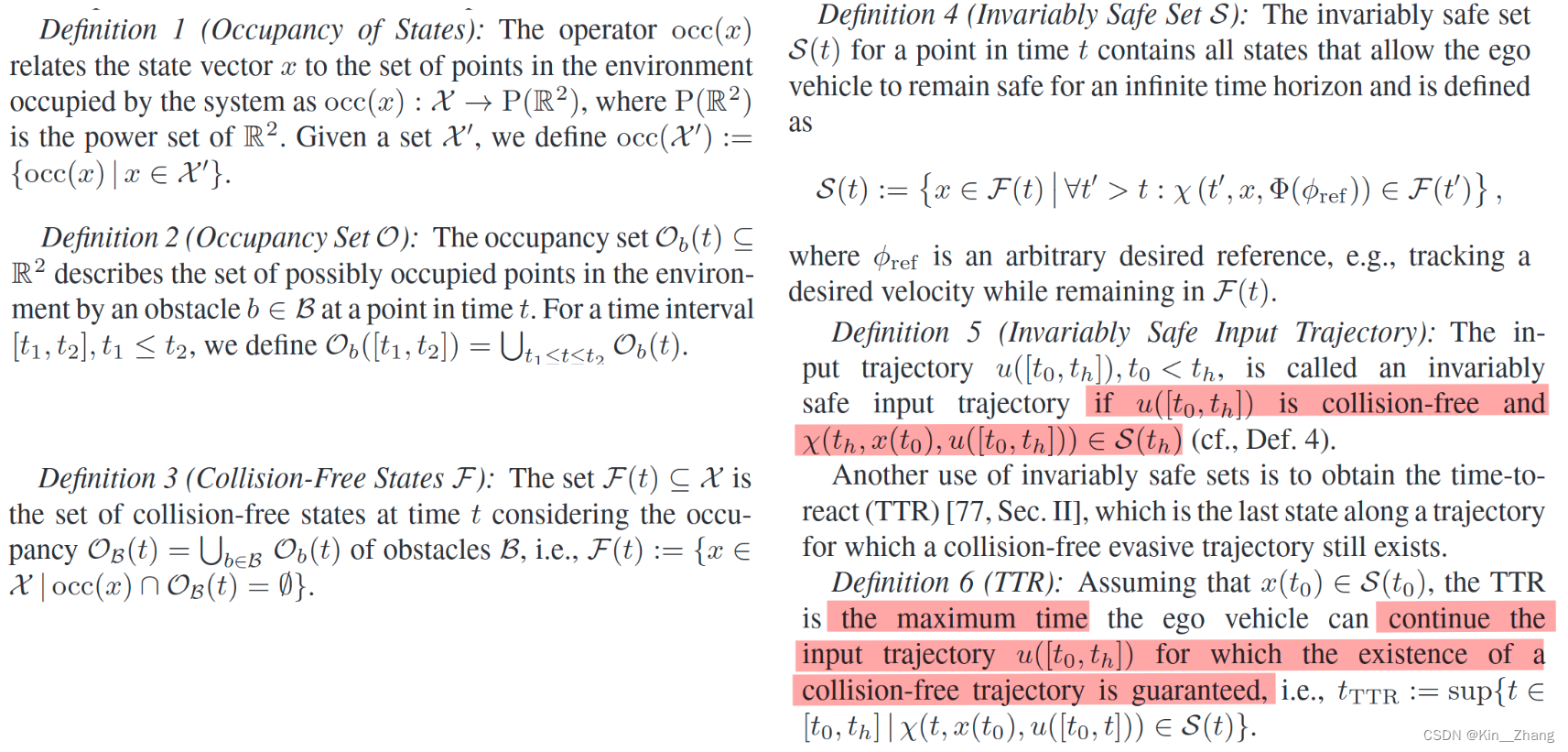
## 2.1 Invariably Safe Sets 计算
在他们之前的工作中有提到[68],为计算 \(\mathcal S(t)\),我们遵循一下规定:
- Formal safe distances[79]:不管前方车辆状态如何 包括前方车辆急刹等情况;在这个距离下,我们总是能刹停下来
- Evasive distances[80]:这个距离下 即使前方车辆急刹,我们也可以通过向相邻车道转向来避免碰撞
后面ab给我解释,两公式用了点时间,首先有个条件:
\]
如果满足这个条件,那么安全距离为:
\]
其中前面是一个整体 即\(\frac{(v-0)^2}{2a}\);后面是另一个整体 在反应时间内的行驶相对距离 即 \(0+vt+\frac{1}{2}at^2\)
否则安全距离为: 即大家都以最大加速度减到速度为0的时候,外加一个自车的反应时间
\]
2.2 Safe& Evasive Distance Set
safe distance set
分横纵向考虑安全距离,纵向距离在[81,82] 二文中有详细考虑与证明:
\]
而这里主要解释横向的evasive distance [感觉翻译成逃逸 逃离距离都不太好 所以就用原文把],首先引入 \(d_{\mathrm{eva}}\) 作为车辆完全换道所需的横向距离,a为横向加速度
\]
同时考虑前方车辆在这个时间内的行驶距离(纵)
\]
evasive distance set
定义如下,证明在[80]
\]
Underapproximation of S
即前两者的set取并集,得到S
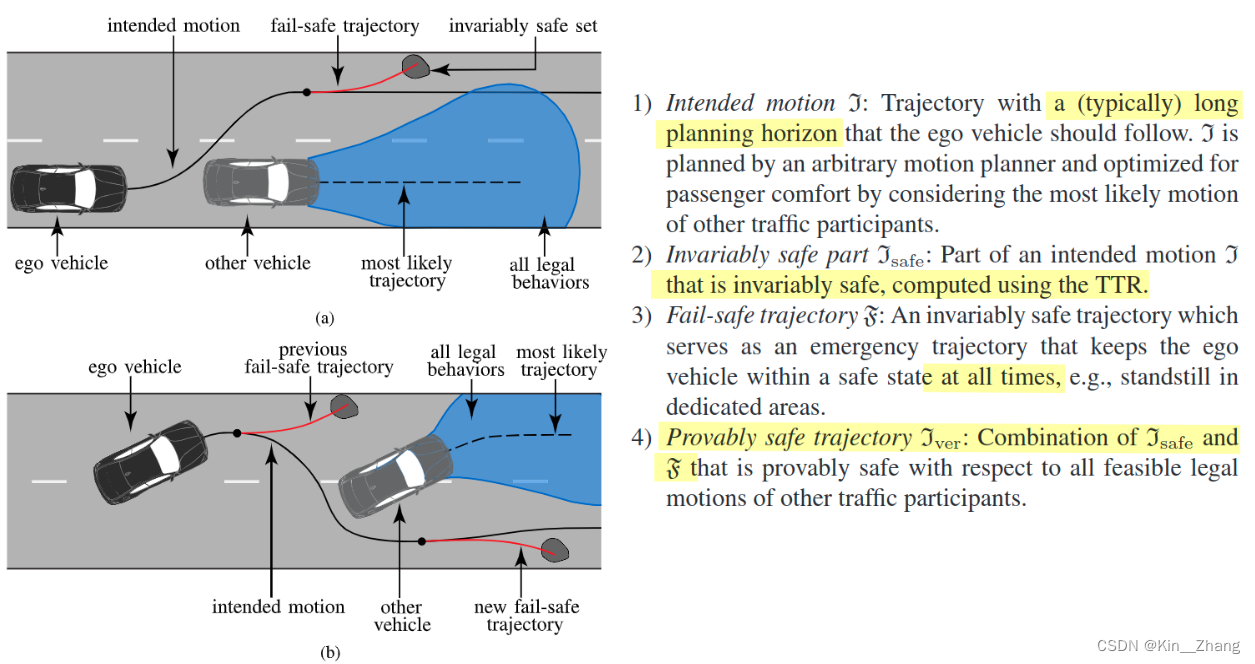
2.3 生成fail-safe Trajectories
纵向 Longitudinal Motion
首先是 纵向运动公式表示:\(x_{\text {lon }}=(s, v, a, j)^{T}\),纵向距离、速度、加速度、jerk;我们使用加加速度作为input,将车辆纵向运动描述为linear time-invariant system
\]
然后加入约束,a 纵向前后的车辆距离,b 车辆本身的最大小 速度、加速度和jerk
v_{\mathrm{min}}\leq &x_{\mathrm{lon}}^{(1)}(t) \leq v_{\mathrm{max}}\\ a_{\mathrm{min}}\leq &x_{\mathrm{lon}}^{(2)}(t) \leq a_{\mathrm{max}}\\ j_{\mathrm{min}}\leq &x_{\mathrm{lon}}^{(3)}(t) \leq j_{\mathrm{max}} \tag{10} \end{align*}
\]
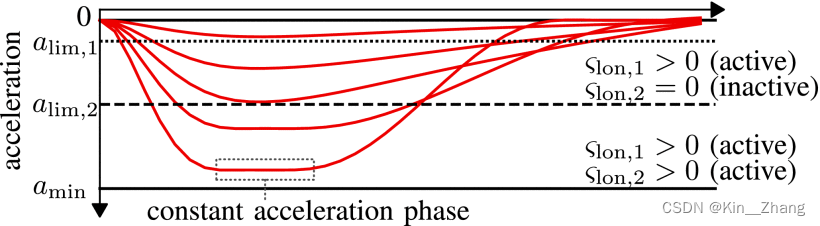
我们演示了刹车,但是因为是>0的加速度,所以此处我们引入两个deceleration limits \(a_{\min }<a_{\lim , 2}<a_{\lim , 1}<0\),其中 \(\varsigma _{\mathrm{lon},1},\varsigma _{\mathrm{lon},2}\geq0\) 是slack variables 松弛约束 (JG: 优化的小trick 可以加速 更容易求解)
\]
纵向的cost
\]
横向 Lateral Motion
同理 横向运动表示:\(x_{\text {lat }}=(d, \theta, \kappa, \dot{\kappa})^{T}\),沿frenet坐标系下的离参考线的横向距离、orientation、曲率、自车曲率的变化
横向的运动描述为下列13公式,其中 \(u_{\mathrm{lat}}(t)=\ddot \kappa(t)\) 来源于 time-invariant linear
\]
对于collision free 将车辆看做三个圆,每个圆离参考线的距离可以用下列公式表示
\]
再加上一系列的和纵向类似的约束,就不在此赘述了
横向的cost function:
\]
生成Fail-Safe
首先是根据TTR生成初始状态,再由初始状态去计算接下来的fail-safe轨迹
下列公式中 \(\Delta_{cor}\)为由车辆中心到后轴中心的距离修正项,\(s_{min}\leq s \leq s_{max}\)
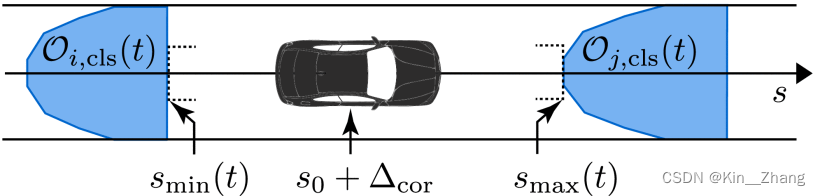
\]
\]
整体生成流程:
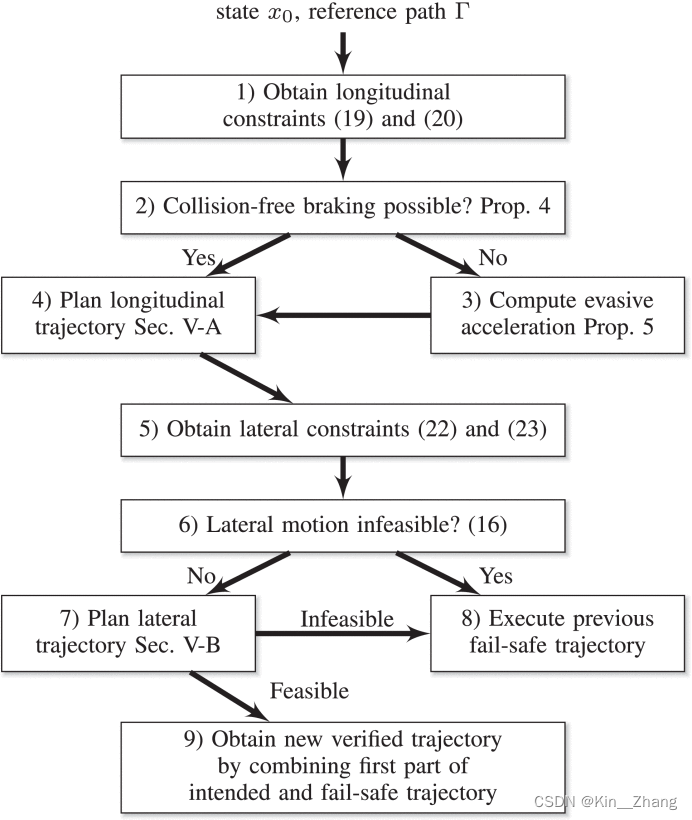
collision avoidance through braking
在初始状态下 能够紧急刹停的条件:Proposition 4
\]
如果碰撞一定会发生,那么guaranteed Time-To-Collision是:
\]
Evasice Acceleration可以由此表示:Proposition 5
\]
需要满足的距离曲线 示意
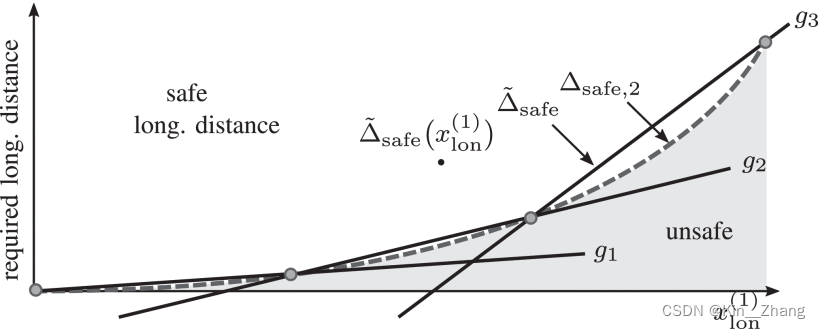
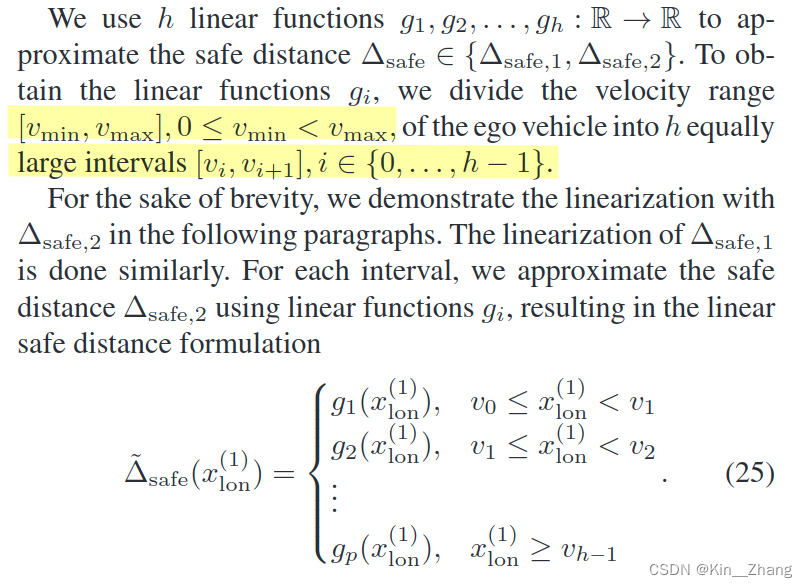
使用h段g的函数去近似安全距离 \(\Delta_{safe}\in\{\Delta_{safe,1},\Delta_{safe,2}\}\) 然后分速度区间去得到h段
为了将此加入到优化过程,可以表示为maximum function[88]
\]
然后加入纵向距离的约束中 公式(9)
\]
因为求解器无法求解带max的函数,所以加入h个小于等于的约束, h不应该太大 也不能太小,前者会增加计算负担,后者会有较大误差
\]
3. 实验及结果
使用了Python和C++,优化求解库使用的是:CVXPY, ECOS and CVXPY-CODEGEN
Invariably safe set of the scenario
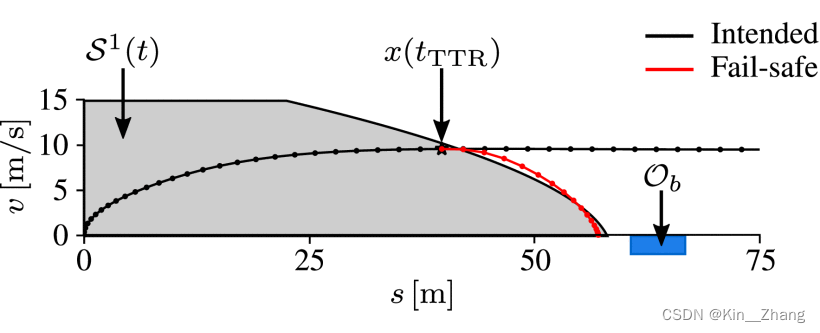
然后主要是实验了几个特定的场景 去验证 fail-safe 的轨迹运行情况:
静态障碍物、前方车辆急刹、行人冲出
4. Conclusion
提出了fail-safe motion planning 来保证AV不会发生事故
对比于其他的verification,我们的方法是第一个能在arbitrary traffic situations使用的;同时保证了40ms内的计算时间,可以与任何其他的motion plan相结合
我们的方案并不会使AV在过度的保守策略中
如果相关法规被扩展,我们的verification也可以自动适应。通过提供的occupancy sets来捕获其他交通参与者的所有合法行为
碎碎念
一开始,ab说这篇算是保守策略的,也就是考虑最差情况;但是初读的时候发现他们在摘要就说了 不会采取过度保守策略,后面一开始没get到这个点,直到问jg的时候发现slack variable和weights的一些trick设计,也就是并不是 非0即1 而是可以超过约束
对于fail-safe的概念也是先由TTR生成状态,然后根据流程图去判断纵向刹停是否可以,不可以的话换横向避障;整体算是一个求解优化问题,只是约束条件等由一系列的状态去决定
赠人点赞 手有余香 ;正向回馈 才能更好开放记录 hhh
【论文阅读】TRO 2021: Fail-Safe Motion Planning for Online Verification of Autonomous Vehicles Using Convex Optimization的更多相关文章
- 【论文阅读】Motion Planning through policy search
想着CSDN还是不适合做论文类的笔记,那里就当做技术/系统笔记区,博客园就专心搞看论文的笔记和一些想法好了,[]以后中框号中间的都算作是自己的内心OS 有时候可能是问题,有时候可能是自问自答,毕竟是笔 ...
- 【论文阅读】PRM-RL Long-range Robotic Navigation Tasks by Combining Reinforcement Learning and Sampling-based Planning
目录 摘要部分: I. Introduction II. Related Work III. Method **IMPORTANT PART A. RL agent training [第一步] B. ...
- 【文献阅读】Automatic berthing for an underactuated unmanned surface vehicle: A real-time motion planning approach
(1)文章工作 This paper presents Extended Dynamic Window Approach (EDWA) for the automatic berthing of an ...
- 【论文阅读】CVPR2021: MP3: A Unified Model to Map, Perceive, Predict and Plan
Sensor/组织: Uber Status: Reading Summary: 非常棒!端到端输出map中间态 一种建图 感知 预测 规划的通用框架 Type: CVPR Year: 2021 引用 ...
- Motion Planning 是什么
前言与引用 这一个呢,主要是自己突然看一篇论文的时候不知道 为什么他提出的方法对于规划来说就是好的,规划又应该分为哪几个部分,解决的是哪几个部分的问题?带着这个问题,我就去搜:Motion Plann ...
- 【论文阅读】DSDNet Deep Structured self-Driving Network
前言引用 [2] DSDNet Deep Structured self-Driving Network Wenyuan Zeng, Shenlong Wang, Renjie Liao, Yun C ...
- [论文阅读笔记] Unsupervised Attributed Network Embedding via Cross Fusion
[论文阅读笔记] Unsupervised Attributed Network Embedding via Cross Fusion 本文结构 解决问题 主要贡献 算法原理 实验结果 参考文献 (1 ...
- 论文阅读(Xiang Bai——【PAMI2017】An End-to-End Trainable Neural Network for Image-based Sequence Recognition and Its Application to Scene Text Recognition)
白翔的CRNN论文阅读 1. 论文题目 Xiang Bai--[PAMI2017]An End-to-End Trainable Neural Network for Image-based Seq ...
- BITED数学建模七日谈之三:怎样进行论文阅读
前两天,我和大家谈了如何阅读教材和备战数模比赛应该积累的内容,本文进入到数学建模七日谈第三天:怎样进行论文阅读. 大家也许看过大量的数学模型的书籍,学过很多相关的课程,但是若没有真刀真枪地看过论文,进 ...
- 论文阅读笔记 - YARN : Architecture of Next Generation Apache Hadoop MapReduceFramework
作者:刘旭晖 Raymond 转载请注明出处 Email:colorant at 163.com BLOG:http://blog.csdn.net/colorant/ 更多论文阅读笔记 http:/ ...
随机推荐
- 视频讲解如何构建surging微服务调用
surging 是一款优秀的微服务引擎,包括了社区版,标准版,异构版,平台版本来解决公司的业务场景需求,如果你是初学者,或者是技术狂热者,社区版完全可以符合你们的要求来学习或者构建起微服务体系的引擎框 ...
- 关于ITIL的习惯性误解
关于ITIL的习惯性误解 1. ITIL是标准?不是!ITIL本质是一套适合西方社会信息化阶段的 模板原版教材 最佳实践(Best Practice),不是标准. 大量的培训师和咨询顾问将其包装成&q ...
- linux系统共享文件夹到局域网
python3 -m http.server https://blog.csdn.net/a772304419/article/details/113338103 Debian下配置Samba服务器 ...
- vueJs开发音乐播放器第二篇(点击歌单跳出详情页)
继上一篇开发音乐播放器歌单列表页 (1.使用router定义跳转链接,2. 使用axios得到音乐第三方数据,并渲染到页面上,3.组件之间传值(props)) 1.接下来使用了vue-router路由 ...
- fastposter v2.9.1 程序员必备海报生成器
fastposter v2.9.1 程序员必备海报生成器 fastposter海报生成器是一款快速开发海报的工具.只需上传一张背景图,在对应的位置放上组件(文字.图片.二维.头像)即可生成海报. 点击 ...
- MSP 通过 Splashtop SOS 远程支持非托管设备
RMM 是 MSP 的绝佳工具.它们使 MSP 可以通过集中控制台来管理其所有客户计算机,通常使他们能够远程访问任何计算机以提供远程支持. 但是,这样做的一个很大限制是--并非所有客户设备都在 MSP ...
- CSS旋转正方体
CSS实现一个旋转的正方体,鼠标放上去会自动解体.比较普通的实现,留个记录.(代码里的注释方式写错了) <!doctype html> <html lang="en&quo ...
- 珠排序算法C# 简单实现 奇葩排序中的算盘排序(算珠排序)算法
Console.WriteLine("Hello World!"); int[] arr = { 1, 3, 4, 0, 22, 4,0, 6, 3,10,8,6,7 }; Con ...
- 运算符优先级 JAVA11
**运算符优先级 ** 规律:算术运算符优先级较高,关系和逻辑运算符优先级较低.多数运算符具有左结合性,单目运算符.三目运算符.赋值运算符具有右结合性. 运算符的优先级 举例 使用优先级为 1 的小括 ...
- Android 12(S) MultiMedia Learning(七)NuPlayer GenericSource
本节来看一下NuPlayer Source中的GenericSource,GenericSource主要是用来播放本地视频的,接下来着重来看以下5个方法: prepare,start,pause,se ...