Unity实现A*寻路算法学习1.0
一、A*寻路算法的原理
如果现在地图上存在两点A、B,这里设A为起点,B为目标点(终点)
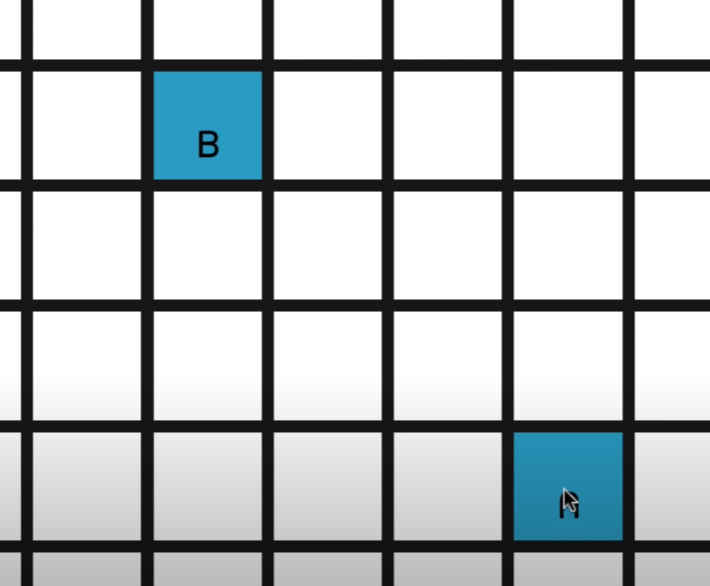
这里为每一个地图节点定义了三个值
gCost:距离起点的Cost(距离)
hCost:距离目标点的Cost(距离)
fCost:gCost和gCost之和。
这里的Cost可以采用直线距离,也可以采用曼哈顿距离等,只要适合就行
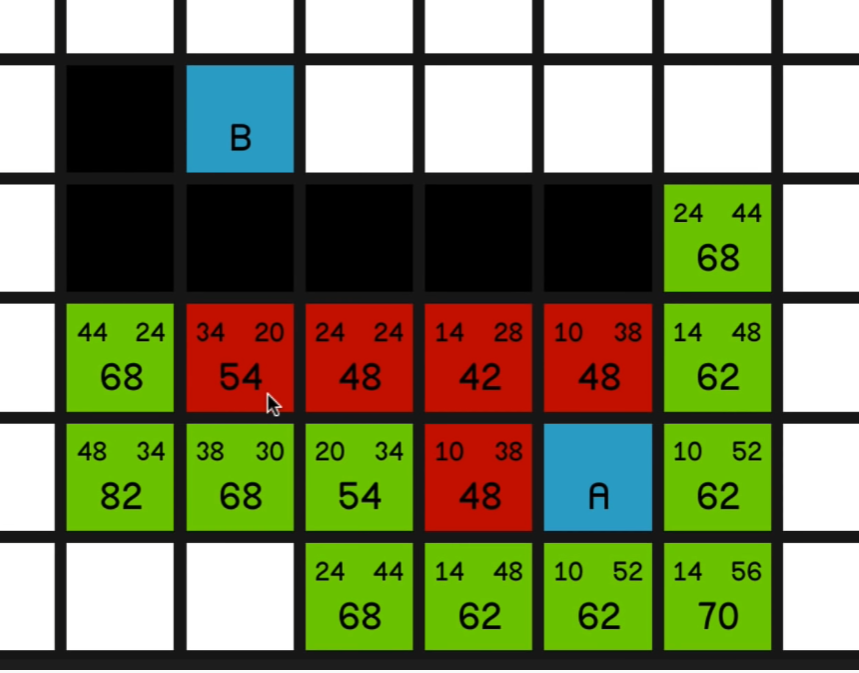
那么先计算起点周围的所有节点的三个值
这里设每两个相邻节点间的距离为10,那么对角线距离为14
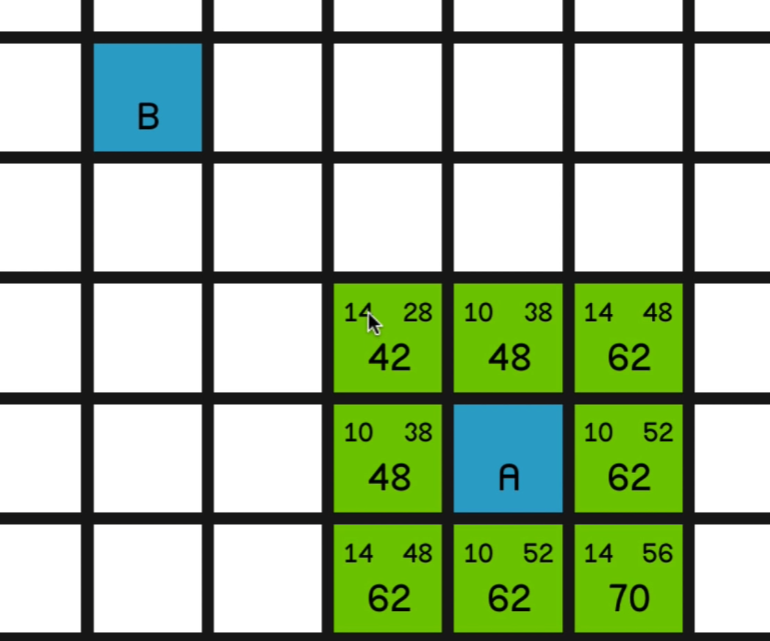
那么计算得出,F值最小的是A点左上角的方块,将节点放入列表(数组也行)将A设为该节点的父节点,然后计算周围方块的距离
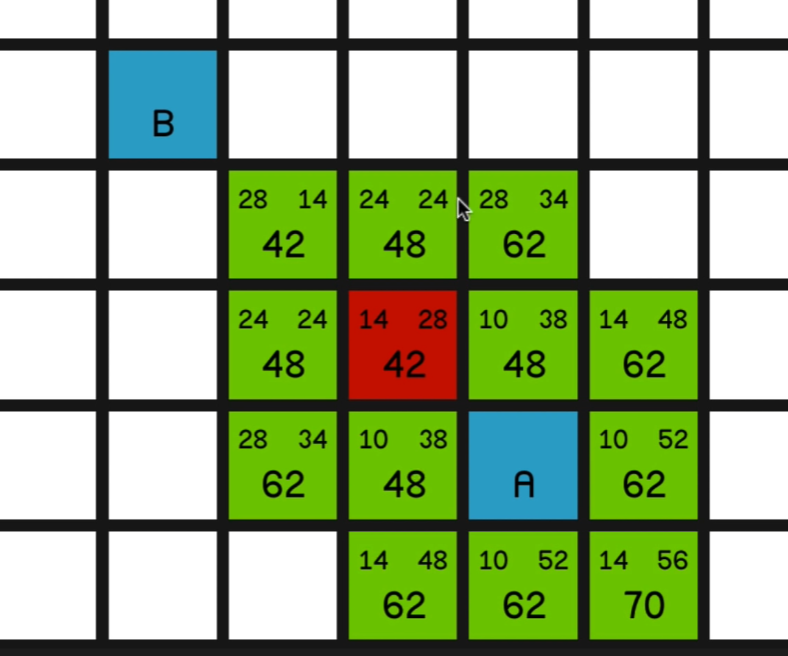
因为是从A点移动过来的,所以下次比较时不再比较A点
再次计算得出F值最小的仍然为左上角的节点

这样就求出了A到B点的最短路径
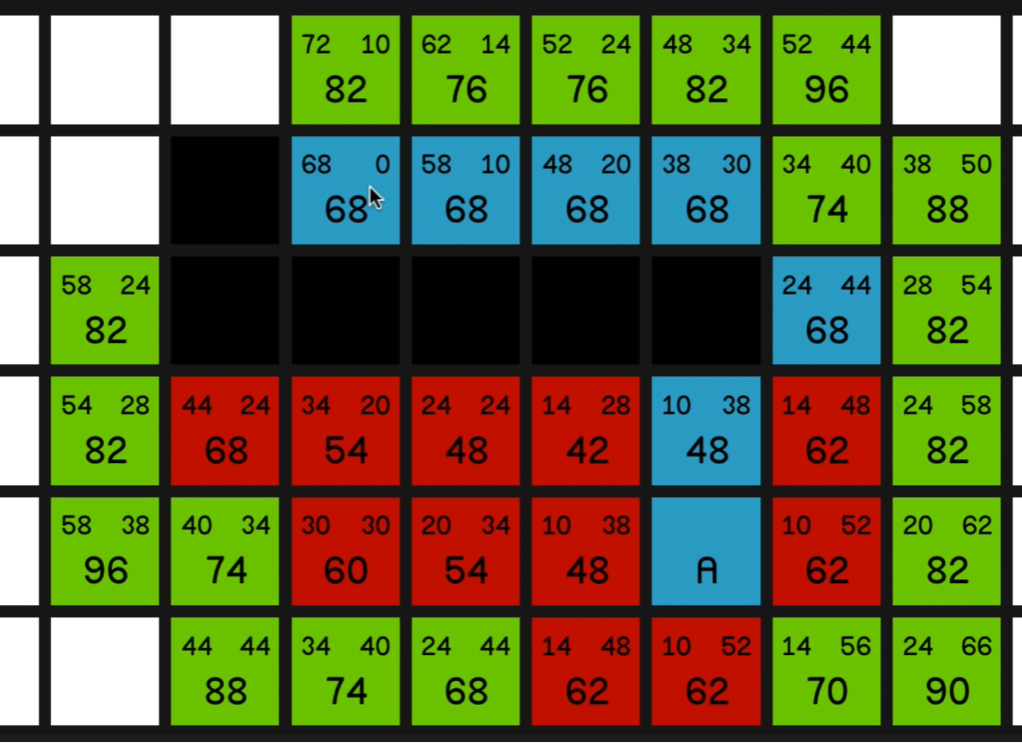
如果A、B之间存在障碍物那么又该怎么办呢?
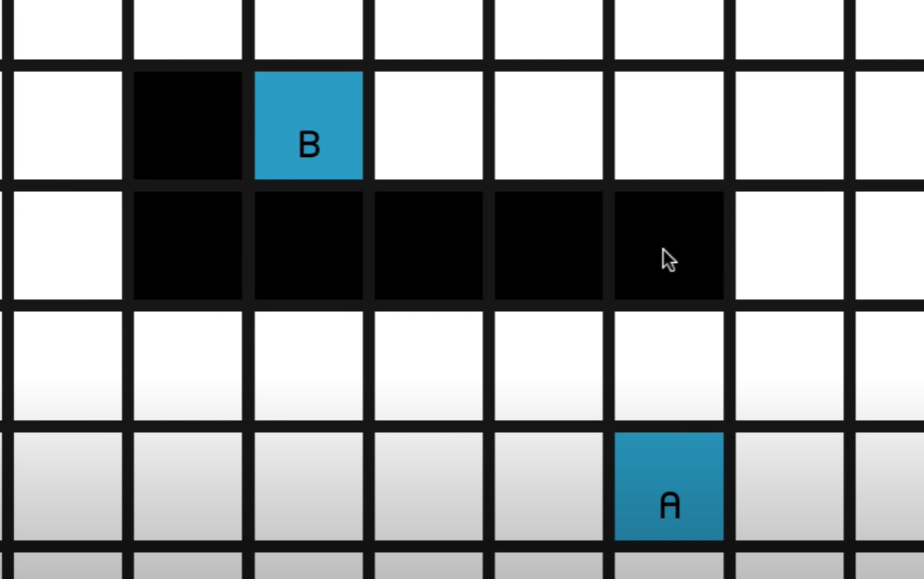
同样也是计算最小的 F 值
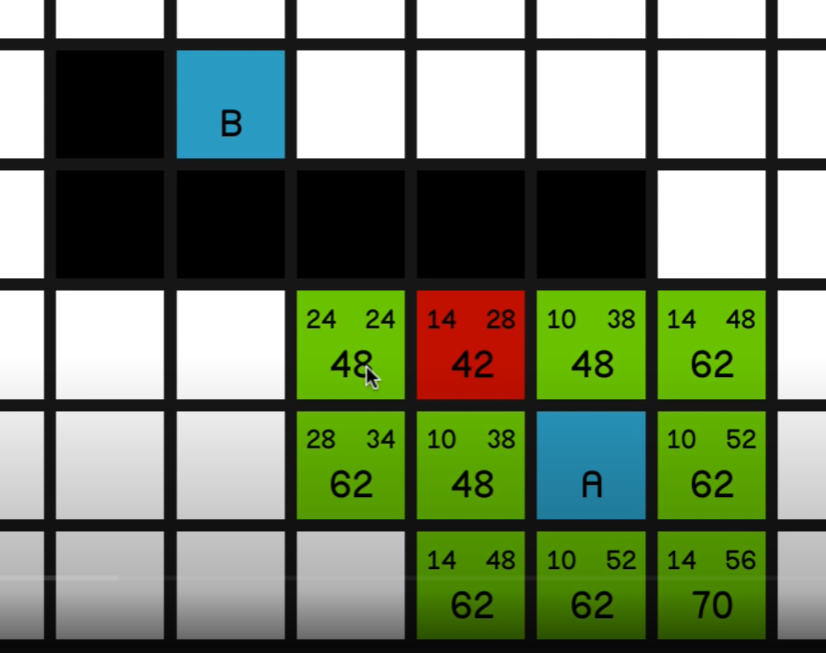
但这里出现了三个相同的F值
那么接下来优先选择 H 值最小的路径,即距离目标点最近的路径
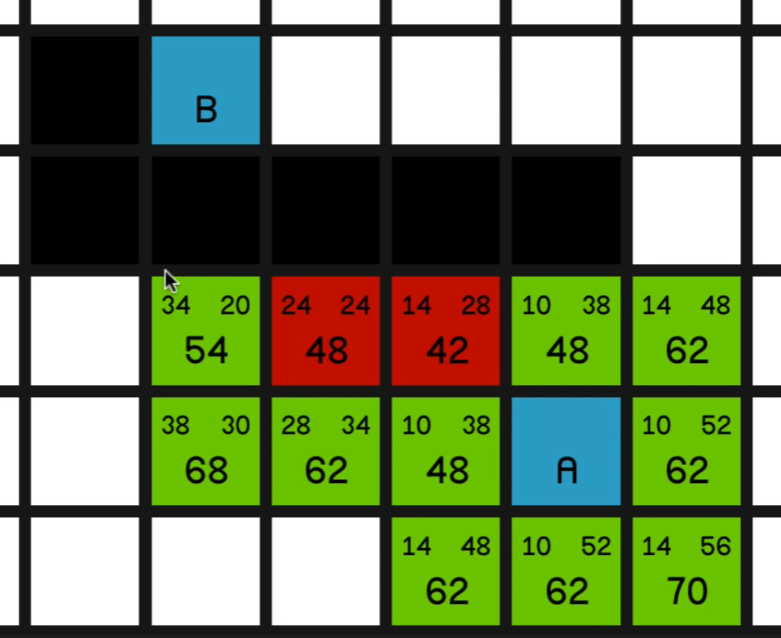
但是移动过后 F 值 反而变大了
那么反过来寻找之前 F 值最小的路径,但接下来还是 F 值更大
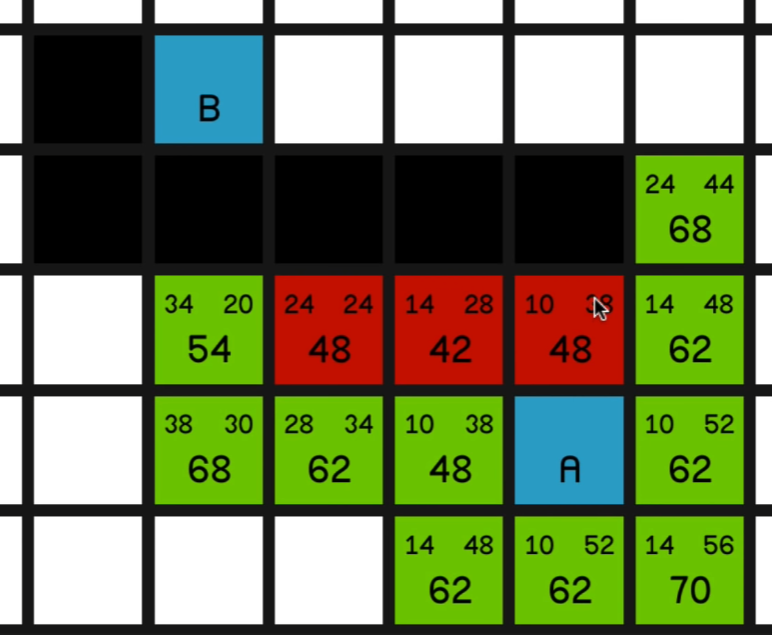
那么仍然选择 F 值最小的路径
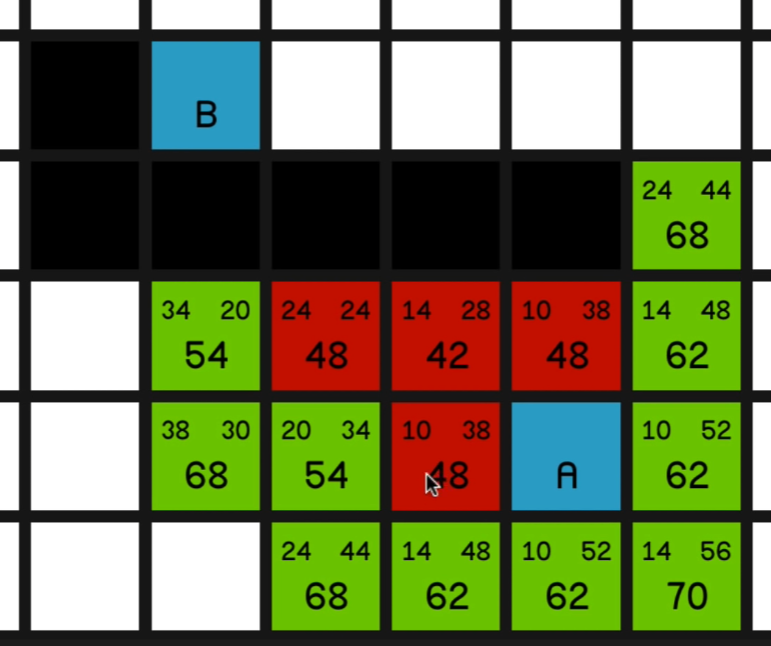
然后是下一个F值最小的路径
然后是下一个
直到距离目的地的hCost为0
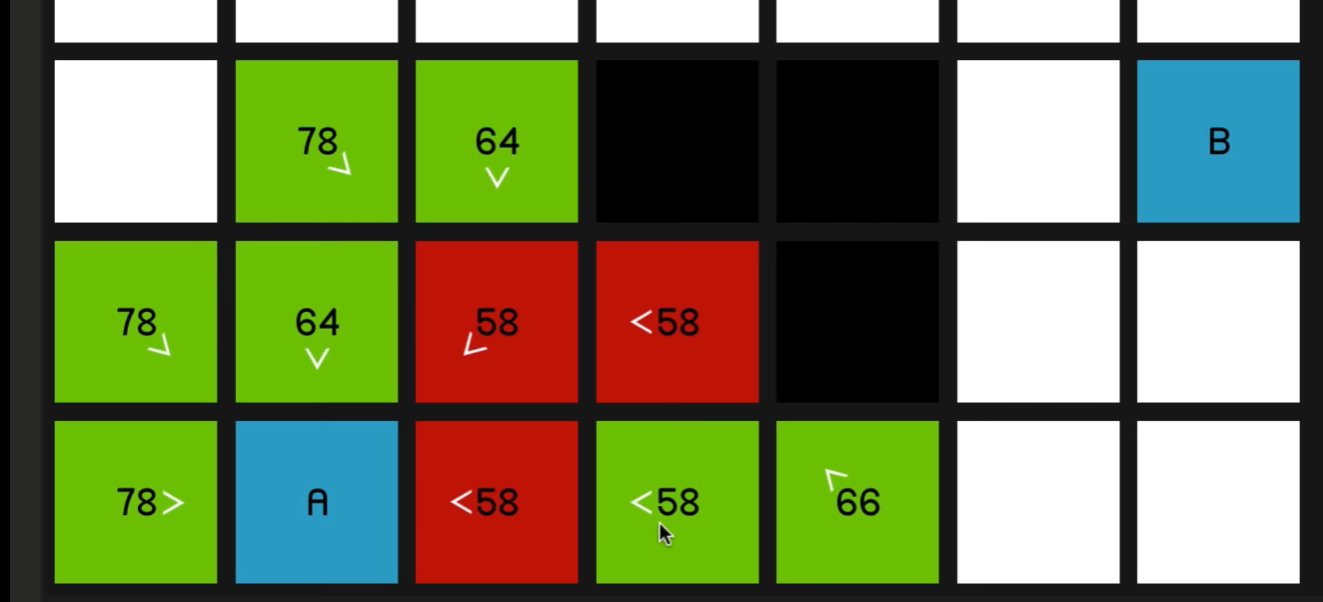
再来一个例子,这里说明如何找出最短的路径,箭头表示父节点

第一次计算A点周围节点的F值后,找出最小的那个,将节点的父节点设为A点
再次计算,将周围节点设为子节点,然后后发现周围有两个58的点,选中gCost更小也就是下面A旁边那个58的点
再次计算
在计算过下面那个58节点后发现旁边节点从这里经过所需的cost更小,所以重新设置父节点
再次说明
如果经过黄线的路径,右下角节点的Cost会达到66

如果经过下面到达,Cost为58,会更小,会重新设置父节点
这里重新计算的fCost为 A — 58 — 58,fCost为58更小,说明新路径更小,重新设置父节点
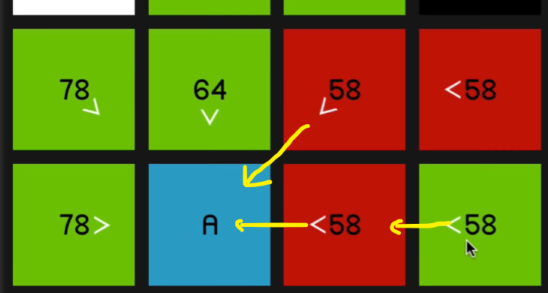
按照此方法循环直至找到目标点
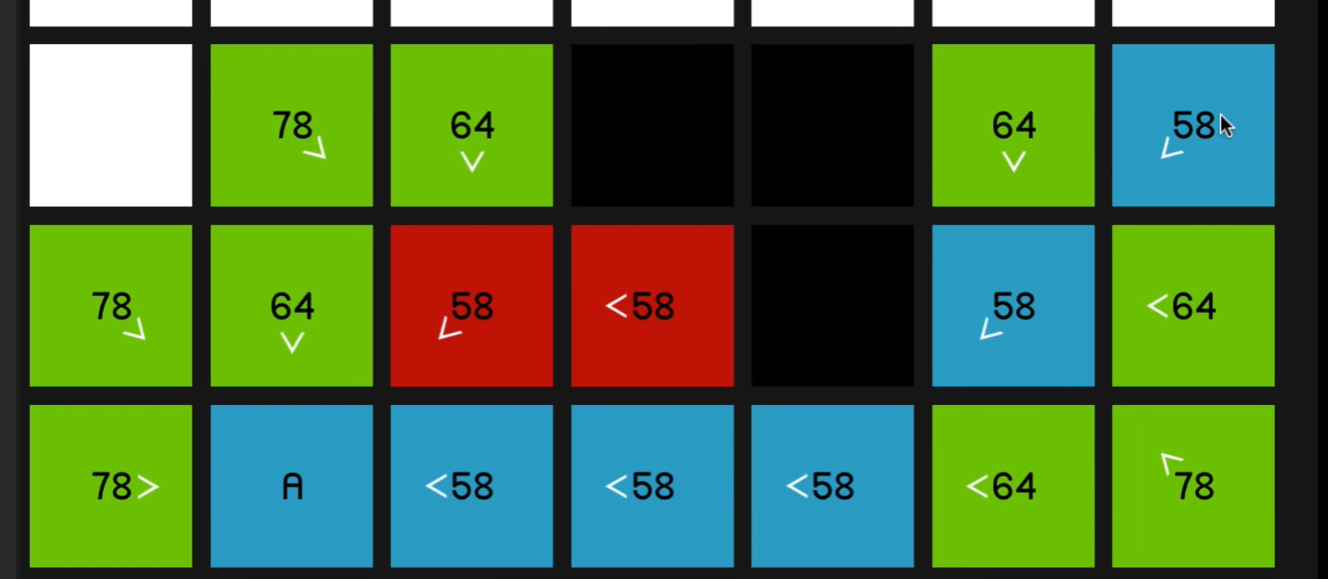
因为设置了父节点(图中箭头表示),那么只需要从目标点开始,一直获取父节点即可,将获取到的所有节点存储进列表或数组然后进行翻转,就得到了A-B的最短路径
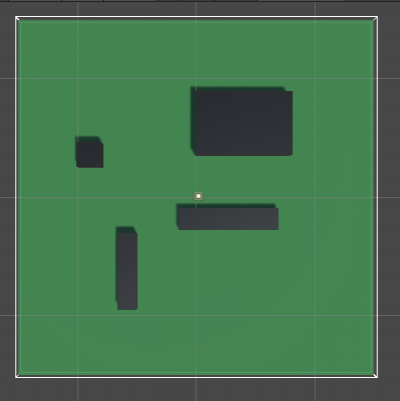
二、在Unity中设置路径点
然后添加Cuble视为障碍物
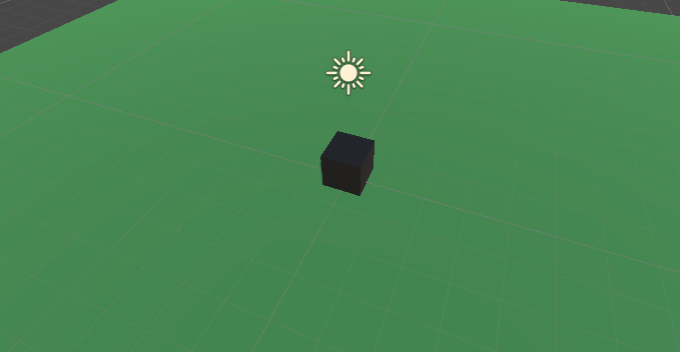
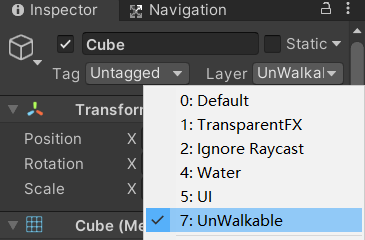
将Cube的层级设为UnWalkable
接着复制几个

新建脚本Node,节点目前只包含坐标位置,和是否能行走
public class Node
{
public bool walkable; //节点是否能走动
public Vector3 worldPos; //节点的空间坐标
public Node(bool _walkable, Vector3 _worldPos) //构造器
{
walkable = _walkable;
worldPos = _worldPos;
}
}
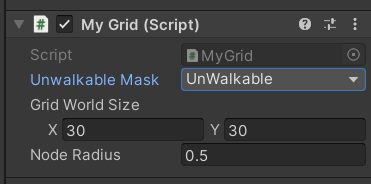
新建脚本MyGrid,添加到新建空物体A*上
public class MyGrid : MonoBehaviour
{
public LayerMask unwalkableMask; //节点是否能走动
public Vector2 gridWorldSize; //地图的范围,节点在地图内创建
public float nodeRadius; //节点的大小
Node[,] grid; //节点数组
private void OnDrawGizmos()
{
//首先画出地图的范围 //宽度 厚度 长度
Gizmos.DrawWireCube(transform.position, new Vector3(gridWorldSize.x, 1, gridWorldSize.y));
}
}
然后设置节点地图大小
继续修改MyGrid
public class MyGrid : MonoBehaviour
{
public LayerMask unwalkableMask; //是否能行走
public Vector2 gridWorldSize; //需要寻路的地图大小
public float nodeRadius; //节点半径
Node[,] grid; //节点
float nodeDiameter; //节点的直径
int gridSizeX, gridSizeY;
void Start()
{
nodeDiameter = nodeRadius * 2;
gridSizeX = Mathf.RoundToInt(gridWorldSize.x / nodeDiameter); //计算出x轴方向有多少个节点
gridSizeY = Mathf.RoundToInt(gridWorldSize.y / nodeDiameter); //计算出z轴方向有多少个节点
CreateGrid();
}
void CreateGrid()
{
grid = new Node[gridSizeX, gridSizeY]; //初始化节点数组
//计算网格的起始点(原点)
Vector3 worldButtonLeft = transform.position
- Vector3.right * gridWorldSize.x / 2
- Vector3.forward * gridWorldSize.y / 2;
for (int x = 0; x < gridSizeX; x++)
{
for (int y = 0; y < gridSizeY; y++)
{
//计算节点的空间坐标
Vector3 worldPoint = worldButtonLeft
+ Vector3.right * (x * nodeDiameter + nodeRadius)
+ Vector3.forward * (y * nodeDiameter + nodeRadius);
//判断节点是否能行走,根据节点范围是否与障碍物碰撞
bool walkable = !(Physics.CheckSphere(worldPoint, nodeRadius, unwalkableMask));
grid[x, y] = new Node(walkable, worldPoint); //将节点的数据添加进二位数组
}
}
}
private void OnDrawGizmos()
{
Gizmos.DrawWireCube(transform.position, new Vector3(gridWorldSize.x, 1, gridWorldSize.y));
if (grid != null)
{
foreach (Node node in grid)
{
//绘制出所有节点,可以行走为白色,不能行走为红色
Gizmos.color = (node.walkable) ? Color.white : Color.red;
Gizmos.DrawCube(node.worldPos, Vector3.one * (nodeDiameter - 0.1f));//减少Gizmos方块的大小便于观察
}
}
}
}
运行结果
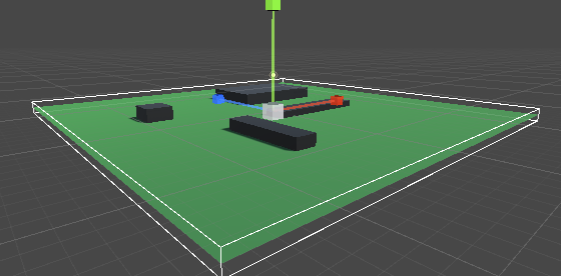
接下来添加一个起点和一个终点
新建两个Capsule

那么如何知道起点现在在哪个节点呢?
继续修改MyGrid
public class MyGrid : MonoBehaviour
{
......
public Node NodeFromWorldPos(Vector3 worldPos) //这里传入起点的位置
{
//这里 percentX 和 percentY 计算起点位置占地图区域横竖坐标的比例
float percentX = (worldPos.x + gridWorldSize.x / 2) / gridWorldSize.x;
float percentY = (worldPos.z + gridWorldSize.y / 2) / gridWorldSize.y;
//将起点的位置限定在地图范围之内
percentX = Mathf.Clamp01(percentX);
percentY = Mathf.Clamp01(percentY);
//总节点数量 * 所在区域比例 = 在第几个节点, -1 是为了从 0 开始计算,因为0也有一个节点
int x = Mathf.RoundToInt((gridSizeX - 1) * percentX);
int y = Mathf.RoundToInt((gridSizeY - 1) * percentY);
return grid[x, y];
}
private void OnDrawGizmos()
{
Gizmos.DrawWireCube(transform.position, new Vector3(gridWorldSize.x, 1, gridWorldSize.y));
if (grid != null)
{
//计算出起点的位置
Node playerNode = NodeFromWorldPos(player.position);
foreach (Node node in grid)
{
Gizmos.color = (node.walkable) ? Color.white : Color.red;
if (playerNode == node) //设置起点位置节点的颜色
{
Gizmos.color = Color.cyan;
}
Gizmos.DrawCube(node.worldPos, Vector3.one * (nodeDiameter - 0.1f));
}
}
}
}
运行结果
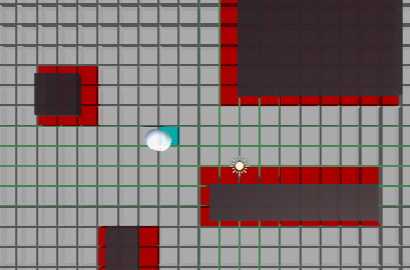
三、实现寻路算法
修改Node
public class Node
{
......
public int gridX; //地图中x方向第几个节点
public int gridY; //地图中y方向第几个节点
public int gCost; //g值
public int hCost; //h值
public Node parent; //父节点,最后用于存储实际路径
//重新添加了两个参数,便于计算邻近节点
public Node(bool _walkable, Vector3 _worldPos,int _gridX, int _gridY)
{
walkable = _walkable;
worldPos = _worldPos;
gridX = _gridX;
gridY = _gridY;
}
public int FCost //属性,F值
{
get
{
return gCost + hCost;
}
}
}
新建脚本PathFinding,并添加到物体A*上
public class PathFinding : MonoBehaviour
{
public Transform seeker, target; //声明两个坐标,起始点和目标点
private MyGrid grid;
......
private void Update()
{
FindPath(seeker.position, target.position); //计算路径
}
private void FindPath(Vector3 startPos, Vector3 targetPos)
{
Node startNode = grid.NodeFromWorldPos(startPos); //输入空间坐标,计算出起始点处于哪个节点位置
Node targwtNode = grid.NodeFromWorldPos(targetPos); //输入空间坐标,计算出目标点处于哪个节点位置
List<Node> openSet = new List<Node>(); //用于存储需要评估的节点
HashSet<Node> closedSet = new HashSet<Node>(); //用于存储已经评估的节点
openSet.Add(startNode); //将起始点加入openSet,进行评估
while (openSet.Count > 0) //如果还有待评估的节点
{
#region //获取待评估列表中 F 值最小的节点
Node currentNode = openSet[0]; //获取其中一个待评估的节点
for (int i = 0; i < openSet.Count; i++) //将该节点与所有待评估的节点比较,找出 F 值 最小的节点,F
//值相同就h值更小的节点
{
if (openSet[i].FCost < currentNode.FCost
|| openSet[i].FCost == currentNode.FCost
&& openSet[i].hCost < currentNode.hCost)
{
currentNode = openSet[i];
}
}
#endregion
openSet.Remove(currentNode); //待评估节点中去掉 F 值最小的节点
closedSet.Add(currentNode); //将该节点加入已评估的节点,之后不再参与评估
if (currentNode == targwtNode) //如果该节点为目标终点,就计算出实际路径并结束循环
{
RetracePath(startNode, targwtNode);
return;
}
//如果该节点不是目标点,遍历该点周围的所有节点
foreach (Node neighbor in grid.GetNeighbors(currentNode))
{
//如果周围某节点不能行走 或 周围某节点已经评估,为上一个节点,则跳过
// 说明某节点已经设置父节点
if (!neighbor.walkable || closedSet.Contains(neighbor))
{
continue;
}
//计算前起始点前往某节点的 gCost 值,起始点的 gCost 值就是0
//经过循环这里会计算周围所有节点的g值
int newMovementCostToNeighbor = currentNode.gCost + GetDinstance(currentNode, neighbor);
//如果新路线 gCost 值更小(更近), 或 某节点没有评估过(为全新的节点)
if (newMovementCostToNeighbor < neighbor.gCost || !openSet.Contains(neighbor))
{
neighbor.gCost = newMovementCostToNeighbor; //计算某节点gCost
neighbor.hCost = GetDinstance(neighbor, targwtNode); //计算某节点hCost
neighbor.parent = currentNode; //将中间节点设为某节点的父节点
//如果存在某节点gCost更小的节点,会重新将中间节点设为某节点父节点
if (!openSet.Contains(neighbor)) //如果某节点没有评估过
{
openSet.Add(neighbor); //将某节点加入待评估列表,在下一次循环进行评估,
//下一次循环又会找出这些周围节点 F 值最小的节点
}
}
}
}
}
private void RetracePath(Node startNode, Node endNode) //获取实际路径
{
List<Node> path = new List<Node>();
Node currentNode = endNode;
while (currentNode != startNode) //如果当前不为目标点
{
path.Add(currentNode); //将当前节点加入路径
currentNode = currentNode.parent;//获取下一个节点(当前节点的父节点)
}
path.Reverse(); //反转所有元素的顺序
grid.path = path; //返回实际路径
}
private int GetDinstance(Node nodeA, Node nodeB) //计算两个节点间的cost
{
int dstX = Mathf.Abs(nodeA.gridX - nodeB.gridX);
int dstY = Mathf.Abs(nodeA.gridY - nodeB.gridY);
if (dstX > dstY)
{
return 14 * dstY + 10 * (dstX - dstY);
}
return 14 * dstX + 10 * (dstY - dstX);
}
}
修改脚本MyGrid
public class MyGrid : MonoBehaviour
{
......
public List<Node> path;
......
void CreateGrid()
{
......
for (int x = 0; x < gridSizeX; x++)
{
for (int y = 0; y < gridSizeY; y++)
{
...... //多了两个参数,方便计算周围节点
grid[x, y] = new Node(walkable, worldPoint, x, y); //将节点的数据添加进二位数组
}
}
}
......
public List<Node> GetNeighbors(Node node) //获取节点周围的所有节点
{
List<Node> neighbors = new List<Node>();
//节点的相对坐标左侧为x-1,右侧为x+1,下方y-1,上方y+1
for (int x = -1; x <= 1; x++)
{
for (int y = -1; y <= 1; y++)
{
if (x == 0 && y == 0) //跳过中间的节点
{
continue;
}
//从x、y相对于中间节点的坐标 加上 中间节点位于地图的坐标,得到了周围节点位于地图的坐标
int checkX = node.gridX + x;
int checkY = node.gridY + y;
//限定节点范围,防止出现地图外的不存在的节点
if (checkX >= 0 && checkX < gridSizeX && checkY >= 0 && checkY < gridSizeY)
{
neighbors.Add(grid[checkX, checkY]);//添加周围节点
}
}
}
return neighbors;
}
private void OnDrawGizmos()
{
......
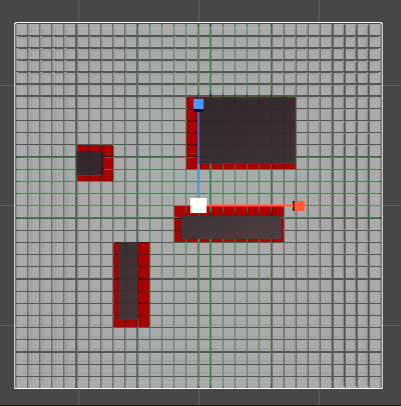
if (path != null)
{
if (path.Contains(node)) //给路径添加颜色
{
Gizmos.color = Color.yellow;
}
}
Gizmos.DrawCube(node.worldPos, Vector3.one * (nodeDiameter - 0.1f));
}
}
}
}
自行在Inspector面板中设置相应的参数
运行结果
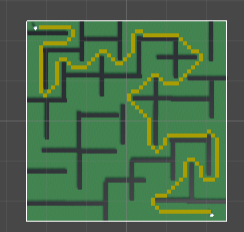
可以随时修改起点和终点的位置
演示视频:https://www.bilibili.com/video/BV14B4y127YN/
下一篇 A*寻路算法2.0 将使用数组实现堆来代替List列表存储节点,算法消耗的时间将减少约60%
Unity实现A*寻路算法学习1.0的更多相关文章
- Unity实现A*寻路算法学习2.0
二叉树存储路径节点 1.0中虽然实现了寻路的算法,但是使用List<>来保存节点性能并不够强 寻路算法学习1.0在这里:https://www.cnblogs.com/AlphaIcaru ...
- A* 寻路算法学习
代码小记 #include <iostream> #include <list> struct POINT { int X; int Y; }; // G: 起点到当前点的成本 ...
- A星寻路算法入门(Unity实现)
最近简单学习了一下A星寻路算法,来记录一下.还是个萌新,如果写的不好,请谅解.Unity版本:2018.3.2f1 A星寻路算法是什么 游戏开发中往往有这样的需求,让玩家控制的角色自动寻路到目标地点, ...
- 基于Unity的A星寻路算法(绝对简单完整版本)
前言 在上一篇文章,介绍了网格地图的实现方式,基于该文章,我们来实现一个A星寻路的算法,最终实现的效果为: 项目源码已上传Github:AStarNavigate 在阅读本篇文章,如果你对于里面提到的 ...
- cocos2d-x学习日志(13) --A星寻路算法demo
你是否在做一款游戏的时候想创造一些怪兽或者游戏主角,让它们移动到特定的位置,避开墙壁和障碍物呢?如果是的话,请看这篇教程,我们会展示如何使用A星寻路算法来实现它! A星算法简介: A*搜寻算法俗称A星 ...
- js实现A*寻路算法
这两天在做百度前端技术学院的题目,其中有涉及到寻路相关的,于是就找来相关博客进行阅读. 看了Create Chen写的理解A*寻路算法具体过程之后,我很快就理解A*算法的原理.不得不说作者写的很好,通 ...
- A*寻路算法的探寻与改良(二)
A*寻路算法的探寻与改良(二) by:田宇轩 第二部分:这部分内容主要是使用C语言编程实现A*, ...
- A*寻路算法lua实现
前言:并在相当长的时间没有写blog该,我觉得有点"颓废"该,最近认识到各种同行,也刚刚大学毕业,我认为他们是优秀的.认识到与自己的间隙,有点自愧不如.我没有写blog当然,部分原 ...
- 如何在Cocos2D游戏中实现A*寻路算法(六)
大熊猫猪·侯佩原创或翻译作品.欢迎转载,转载请注明出处. 如果觉得写的不好请告诉我,如果觉得不错请多多支持点赞.谢谢! hopy ;) 免责申明:本博客提供的所有翻译文章原稿均来自互联网,仅供学习交流 ...
随机推荐
- Nature | 易基因DNA甲基化测序助力人多能干细胞向胚胎全能8细胞的人工诱导
北京时间2022年3月22日凌晨,<Nature>期刊在线刊登了由中国科学院广州生物医学与健康研究所等单位牵头,深圳市易基因科技有限公司.中国科学技术大学等单位参与,应用人多能干细胞向胚胎 ...
- 详细描述一下 Elasticsearch 搜索的过程?
想了解 ES 搜索的底层原理,不再只关注业务层面了. 解答: 搜索拆解为"query then fetch" 两个阶段. query 阶段的目的:定位到位置,但不取. 步骤拆解如下 ...
- 使用 rabbitmq 的场景?
1.服务间异步通信 2.顺序消费 3.定时任务 4.请求削峰
- 如何在自定义端口上运行 Spring Boot 应用程序?
为了在自定义端口上运行 Spring Boot 应用程序,您可以在 application.properties 中指定端口. server.port = 8090
- 区分 BeanFactory 和 ApplicationContext?
BeanFactory ApplicationContext 它使用懒加载 它使用即时加载 它使用语法显式提供资源对象 它自己创建和管理资源对象 不支持国际化 支持国际化 不支持基于依赖的注解 支持基 ...
- SpringCloud个人笔记-01-Eureka初体验
eureka是一个高可用的组件,它没有后端缓存,每一个实例注册之后需要向注册中心发送心跳,在默认情况下erureka server也是一个eureka client ,必须要指定一个 serve &l ...
- 攻防世界upload1
upload1 进入环境就一个上传,我们先上传一个普通的木马文件看看 木马内容 <?php @eval($_POST["cmd"]); ?> 估计是前端校验我们查看源码 ...
- 模拟web服务器http请求应答
我们在浏览器打开网页,其实是向远端服务器提出页面发送请求,远端服务器在接到请求后,就开始执行请求页面的程序文件,然后将执行结果通过html格式,发送到你的浏览器,再显示出来.以下用百度(www.bai ...
- Vue的computed(计算属性)使用实例之TodoList
最近倒腾了一会vue,有点迷惑其中methods与computed这两个属性的区别,所以试着写了TodoList这个demo,(好土掩面逃~); 1. methods methods类似react中组 ...
- win10 Celery异步任务报错: Task handler raised error: ValueError('not enough values to unpack (expected 3, got 0)
示例代码如下: from celery import Celery app = Celery('tasks', backend='redis://×××:6379/1', broker='redis: ...