4.1 ROS元功能包
4.1 ROS元功能包
场景:完成ROS中一个系统性的功能,可能涉及到多个功能包,比如实现了机器人导航模块,该模块下有地图、定位、路径规划...等不同的子级功能包。那么调用者安装该模块时,需要逐一的安装每一个功能包吗?
显而易见的,逐一安装功能包的效率低下,在ROS中,提供了一种方式可以将不同的功能包打包成一个功能包,当安装某个功能模块时,直接调用打包后的功能包即可,该包又称之为元功能包(metapackage)。
概念
MetaPackage是Linux的一个文件管理系统的概念。是ROS中的一个虚包,里面没有实质性的内容,但是它依赖了其他的软件包,通过这种方法可以把其他包组合起来,我们可以认为它是一本书的目录索引,告诉我们这个包集合中有哪些子包,并且该去哪里下载。
例如:
- sudo apt install ros-noetic-desktop-full 命令安装ros时就使用了元功能包,该元功能包依赖于ROS中的其他一些功能包,安装该包时会一并安装依赖。
还有一些常见的MetaPackage:navigation moveit! turtlebot3 ....
作用
方便用户的安装,我们只需要这一个包就可以把其他相关的软件包组织到一起安装了。
实现
首先:新建一个功能包
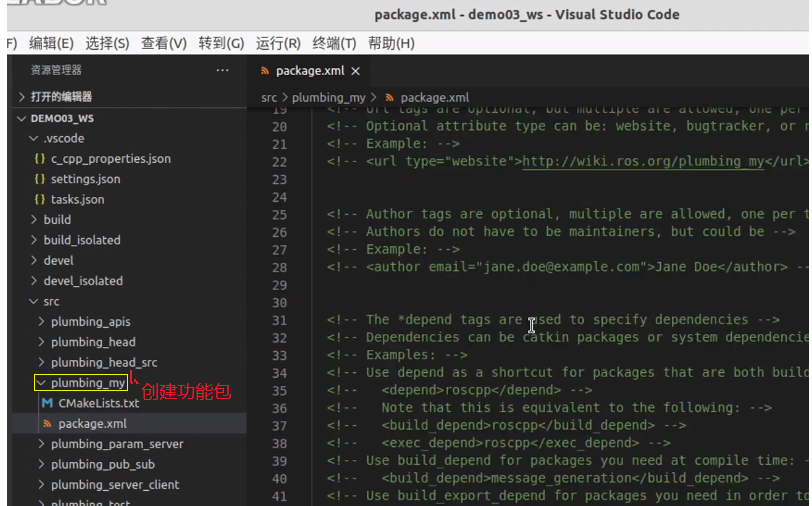
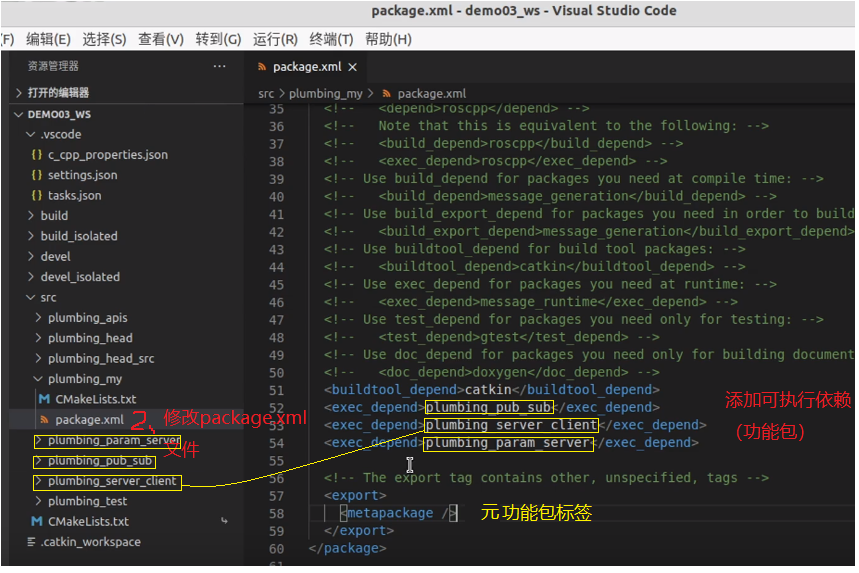
然后:修改package.xml ,内容如下:
<exec_depend>被集成的功能包</exec_depend>
.....
<export>
<metapackage />
</export>
最后:修改 CMakeLists.txt,内容如下:
cmake_minimum_required(VERSION 3.0.2)
project(demo)
find_package(catkin REQUIRED)
catkin_metapackage()
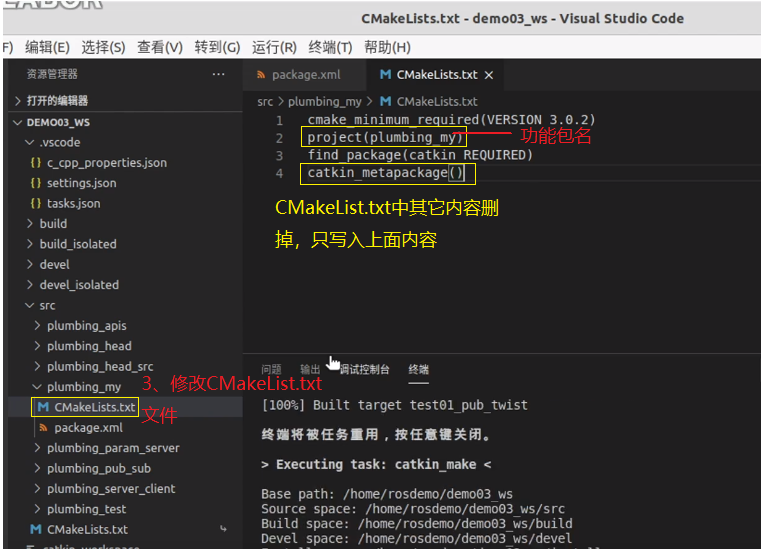
PS:CMakeLists.txt 中不可以有换行。
另请参考:
4.1 ROS元功能包的更多相关文章
- 在github上最热门好评高的ROS相关功能包
在github上最热门最受欢迎的ROS相关功能包 下面依次列出,排名不分先后: 1 Simulation Tools In ROS https://github.com/ros-simulation ...
- ROS新功能包PlotJuggler绘图
http://www.ros.org/news/2017/01/new-package-plotjuggler.html PlotJuggler,一个基于Qt的应用程序,允许用户加载,搜索和绘图数据. ...
- ROS(indigo)机器人操作系统学习资料和常用功能包汇总整理(ubuntu14.04LTS)
ROS(indigo)机器人操作系统学习资料和常用功能包汇总整理(ubuntu14.04LTS) 1. 网站资源: ROSwiki官网:http://wiki.ros.org/cn GitHub ...
- 创建ROS功能包(四)
为了方便直接用ROS的create-pkg命令行工具 roscreate-pkg chapter2_tutorials std_msgs rospy roscpp std_msgs 包含了常见的消息类 ...
- (转)-编写第一个ROS(创建工作空间workspace和功能包package)
原文网址:http://www.cnblogs.com/liuamin/p/5704281.html 刚接触ROS,学着写了第一个程序,怕以后忘记,就将其步骤记录下来.. 首先你必须保证你电脑已安装配 ...
- 编写第一个ROS(创建工作空间workspace和功能包package)
刚接触ROS,学着写了第一个程序,怕以后忘记,就将其步骤记录下来.. 首先你必须保证你电脑已安装配置好ROS. 1.创建工作空间(workspace) 我们所创建功能包package,应该全部放到一个 ...
- 在ros功能包CMakeLists.txt中获取所在功能包的路径 便于添加第三方库的相对路径
在 ros 功能包中要使用第三方的动态库,将其放在系统默认库路径和使用绝对路径均不可取,这样的话可移植性较差,将该功能包移到其它电脑时要重新配置依赖库的路径,太麻烦了. 于是找到下面这个方法,解决了R ...
- ROS功能包- rrt_exploration
一种基于RRT实现的多机器人地图探测算法的ROS软件包. 它还具有使用图像处理提取边界点.基于图像的边界检测等功能. 适用版本:indigo.jade.kinetic.lunar. 注意事项:官网文档 ...
- ROS-3 : Catkin工作空间和ROS功能包
一.创建一个Catkin工作空间 步骤一:构建catkin工作空间 安装完成ROS版本后,设置好环境变量:$ source /opt/ros/kinetic/setup.bash.然后即可创建一个ca ...
随机推荐
- ceph 问题总结已解决
waiting for a volume to be created, either by external provisioner "ceph.com/rbd" or manua ...
- Python:pandas(二)——pandas函数
Python:pandas(一) 这一章翻译总结自:pandas官方文档--General functions 空值:pd.NaT.np.nan //判断是否为空 if a is np.nan: .. ...
- Python:Dict
0.运算符 in:检查字典中是否有某个key 'a' in {'a':1,'b':2} True 提取其中Key对应的Value: d={'1':'A','2':'B','3':'C'} d['2'] ...
- c# TextBox只能输入数字的处理方法(完整版各种情况考虑在内,可根据需求灵活修改)
//选择文本框的事件窗口,找到按键输入的方法KeyPress,双击建立新的方法. /// <summary> /// textBox只能输入数字的处理方法 /// </summary ...
- matplotlib(终章)
今日内容概要 matplotlib实际案例演示 各种图形的总结 数据清洗(简单) 数据清洗的案例 今日内容详细 matplotlib实际案例演示 # 2.绘制每年电影上映数量曲线图 首先载入模块 im ...
- SQL从零到迅速精通【实用函数(2)】
1.对查询结果进行排序 查询stu_info表中所有学生信息,并按照成绩由高到底进行排序,输入语句如下. SELECT * FROM stu_info ORDER BY s_score DESC; ...
- SpringBoot接入轻量级分布式日志框架(GrayLog)
我是3y,一年CRUD经验用十年的markdown程序员常年被誉为优质八股文选手 前两天我不是发了一篇数据链路追踪的文章嘛,在末尾也遗留了TODO:运行应用的服务器一般是集群,日志数据会记录到不同的 ...
- 一些JDK自带的性能分析利器
有时候碰到服务器CPU飙升或者程序卡死之类的问题,一般都不太好定位.这类bug一般都隐藏的比较深并且还可能是偶发性的,比较棘手. 对于此类问题,一般我们都有固定的分析流程.借助于JDK自带的一些分析工 ...
- Golang 语言特性
1. 函数 与c 语言不同,go 语言中,函数的参数和返回值都由栈来存储. 传值:函数调用时会复制参数,被调用方和调用方持有两份不相关的两份数据 传引用:函数调用时会传递参数指针,被调用方和调用方持有 ...
- JavaWeb 08_JSP+Dao+Bean+Servlet 实现登录注册(连接数据库,验证码登录,两周内免登陆等功能)
一.数据库db_01 表usert 字段username,password 二. 目录 三. 配置信息 四. 代码 index.jsp <script type="text/j ...