使用ros_driver运行velodyne16线激光雷达
一、使用ros_driver运行VLP16
推荐网址:
http://blog.csdn.net/littlethunder/article/details/51920681
https://www.cnblogs.com/williamc17/p/9705492.html
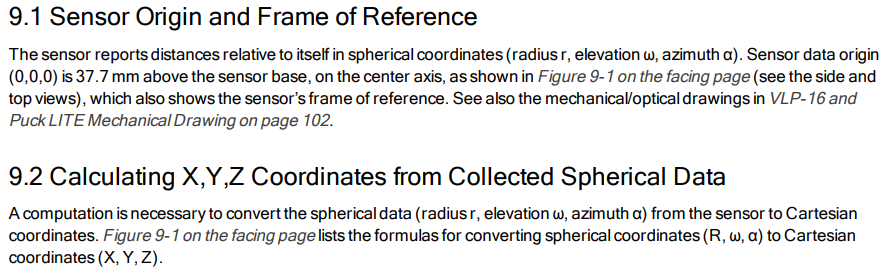
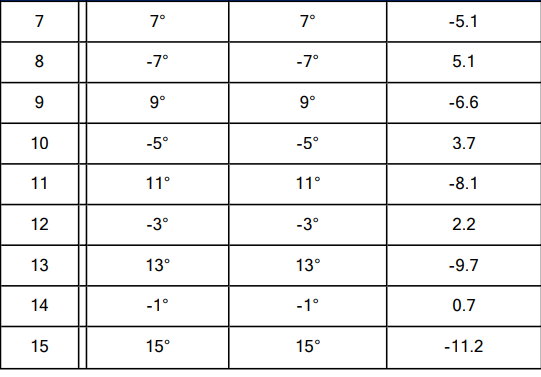
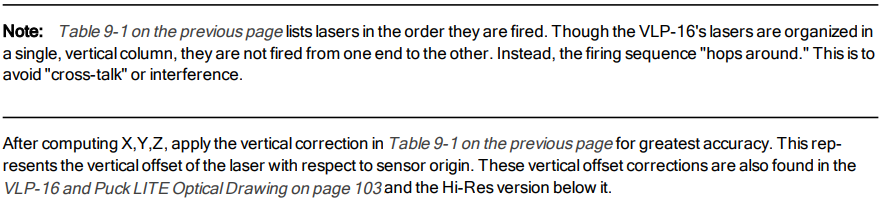
二、源于用户手册的情报


三、ros-driver所使用的坐标系不同于官方用户手册指定的坐标系
为了让所有开发者围绕相同的坐标系开发软件,ros中制定了标准的坐标系定义方案。
详情如以下链接所示:
https://github.com/ros-drivers/velodyne/issues/71
http://www.ros.org/reps/rep-0103.html#axis-orientation
http://www.ros.org/reps/rep-0105.html
四、ros_driver近期的更新
该更新解决两个问题:
a. 可以输出有序的点云; organize_cloud:=true
b. 可以保证每一帧点云的第一个点都来自相同的方位; cut_angle:=6.283185 // 2*pi = 6.283185
roslaunch velodyne_pointcloud VLP16_points.launch cut_angle:=6.283185 organize_cloud:=true calibr:="/home/gordon/ros_ws/src/velodyne/velodyne_pointcloud/VLP16.yaml"
c. 可以设置雷达的采集范围而不会导致单帧点云的点出错,但是这会导致每一帧点云的第一个点来自不同的方位; cut_angle:=5.24 // 5.24 rad = 300 deg
更多问题可以到ros_driver/velodyne的github issue上提问,维护者超nice!
使用ros_driver运行velodyne16线激光雷达的更多相关文章
- 使用velodyne16线激光雷达跑loam-velodyne
一.velodyne-VLP16使用教程 推荐网址: http://blog.csdn.net/littlethunder/article/details/51920681 https://www.c ...
- lego loam 跑镭神32线激光雷达
师弟反应镭神32线激光雷达(32C)录制的数据包不能跑lego loam,这里就总结一下. 首先lego loam默认的接受的topic name是velodyne_points,点云的frame_i ...
- vue-cli中process.env配置以及打包本地运行或者线上运行配置
我们知道打包默认npm run build,可是打包后点击dist文件中index.html一片空白.问题在于路径问题.我们在工程文件的最外层增加文件.env.production这个文件就是这么奇怪 ...
- cartographer 3D运行录制rosbag包
目录: 1.运行多线激光雷达: 2.运行IMU: 3.录制rosbag包: 4.配置cartographer: 5.查看地图: 1.运行多线激光雷达: 主要是测试雷达是否正在运行,确认雷达点云topi ...
- 开发函数计算的正确姿势 —— 使用 Fun Local 本地运行与调试
前言 首先介绍下在本文出现的几个比较重要的概念: 函数计算(Function Compute): 函数计算是一个事件驱动的服务,通过函数计算,用户无需管理服务器等运行情况,只需编写代码并上传.函数计算 ...
- Learning opencv续不足(七)线图像的设计D
因为线图像startline有了起点和终点,我们就可以用DDA法求出线上所有点,任意斜率直线通过四象限八区域查表法界定.我们只示范一个区域:函数为: public PointF DdaFindPtIm ...
- Lidar激光雷达市场
Lidar激光雷达市场 近年来,激光雷达技术在飞速发展,从一开始的激光测距技术,逐步发展了激光测速.激光扫描成像.激光多普勒成像等技术,如今在无人驾驶.AGV.机器人等领域已相继出现激光雷达的身影. ...
- TOF摄像机可以替代Flash激光雷达吗?
TOF摄像机可以替代Flash激光雷达吗? 一.基于ToF技术的Flash激光雷达 基本成像原理上ToF Camera与LiDAR相同,都采用飞行时间测距技术(包括利用APD或SPAD的直接测距法,和 ...
- 激光雷达 LOAM 论文 解析
转自:https://blog.csdn.net/hltt3838/article/details/109261334 固态激光雷达的一段视频:https://v.qq.com/x/page/a078 ...
随机推荐
- k8s-kubernetes-configmap存储
存储 configMap configMap描述信息 ConfigMap功能在Kubernetes1.2版本中引入,许多应用程序会从配置文件.命令行参数或环境变量中读取配置信息. ConfigMap ...
- linux whoami 显示当前用户的用户名
[root@MongoDB ~]# whoami root
- urllib:处理网络异常
from urllib import request, error import ssl import urllib.request import socket import urllib.error ...
- Objective-C中的自动释放池
自动释放池块@autoreleasepool 自动释放池块在MRC和ARC下都可以使用.在MARC下,为了将自动释放池块内部的变量放入自动释放池,需要手动调用autorelease方法:在ARC下,只 ...
- [转载]Ubuntu如何切换到命令行模式
来源:https://blog.csdn.net/lyy14011305/article/details/76325067 Ubuntu提供两种进入方式,一个是我们平常最熟悉的图形界面形式,还有一种是 ...
- springboot中的编码设置
在springboot中编码配置可以通过filter也可以通过springboot的核心配置文件application.properties中配置如下信息: #配置字符编码spring.http.en ...
- 深入理解java虚拟机(1)走进jvm
1.JDK:java程序设计语言.java虚拟机.javaAPI 二.自动内存管理机制 ----------------------------------------------------- 1. ...
- 什么是RESTful API、WSGI、pecan
RESTful API REST的全称是Representational State Transfer(表征状态转移), 是Roy Fielding在他的博士论文Architectural Style ...
- Java学习路线(完整详细版)
Java学习路线(完整详细版) https://jingyan.baidu.com/article/c1a3101e110864de656deb83.html
- python gRPC简单示例
Ubuntu18.04安装gRPC protobuf-compiler-grpc安装 sudo apt-get install protobuf-compiler-grpc protobuf-comp ...