[Computer Vision] SIFT特征学习笔记
SIFT(Scale Invariant Feature Transform),尺度空间不变特征,目前手工设计的最好vision特征。
以下是学习http://blog.csdn.net/zddblog/article/details/7521424后的收获。
一、尺度空间
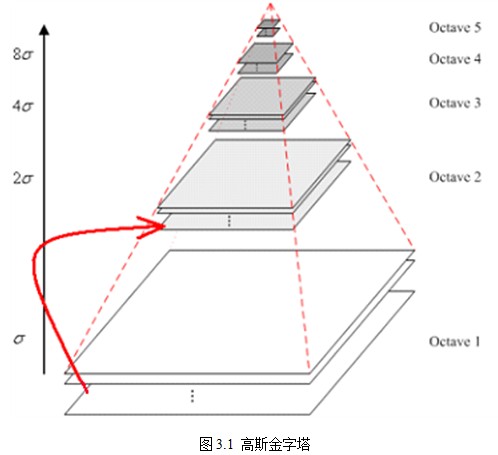
gaussian pyramid的产生:
1、为避免对第一组第一层图片(原始图片)做高斯滤波导致损失,在其基础上将尺度扩大一倍作为-1层,方法是用 =0.5做高斯滤波。
=0.5做高斯滤波。
2、对每组(octave)倒数第三张图片做降采样,产生下组的第一层图片(第一组不用),由于降采样,越往上图片越小。
3、每层图片在上一层基础上做高斯滤波。
所谓尺度即一张图片的精细程度或概括度,用度量,
由下往上尺度变大。尺度用高斯函数中的方差 来描述。
来描述。


从2.1的高斯分布图可知,对一个区域做高斯滤波,若方差越大(峰越低),则这个点被平滑得越厉害,那么图像就变得越模糊。在模糊的图片中我们看到的是更宏观的东西(大,尺度大),而清晰的图片看到的是更为微观的东西(小,尺度小)。
点->线,边缘,角点->轮廓形状->鼻子,嘴巴->头->人(尺度由小到大)
组(O,octave),层(S),尺度()三者的关系:

可见逐组逐层递增。
二、尺度空间上的关键点选取
关键点,即金字塔上的三维局部极值点。(三维:x,y,,每张图上的位置及图的尺度)
1、首先对gaussian做高斯差分(Difference of Gaussian,DOG)

即上层减下层。
原因:2002年Mikolajczyk在详细的实验比较中发现尺度归一化的高斯拉普拉斯函数 的极大值和极小值同其它的特征提取函数,例如:梯度,Hessian或Harris角特征比较,能够产生最稳定的图像特征。而Lindeberg早在1994年就发现高斯差分函数(Difference of Gaussian ,简称DOG算子)与尺度归一化的高斯拉普拉斯函数非常近似。
的极大值和极小值同其它的特征提取函数,例如:梯度,Hessian或Harris角特征比较,能够产生最稳定的图像特征。而Lindeberg早在1994年就发现高斯差分函数(Difference of Gaussian ,简称DOG算子)与尺度归一化的高斯拉普拉斯函数非常近似。
所以用DOG之后提取的极值更有效。从而金字塔变成:

2、关键点定位

取三维极值点。
用到了两个trick
(1)子像素插值(Sub-pixel Interpolation),找到连续空间上的精确极值点。
(2)消除边缘效应,DOG算子会产生较强的边缘响应。

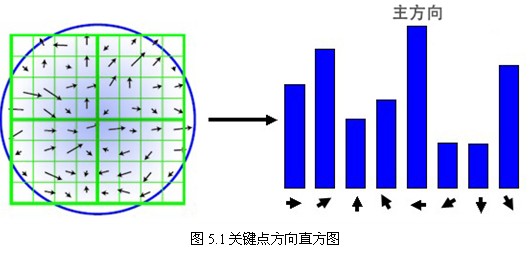
3、关键点方向
在每个找到的关键点的二维邻域内取方向梯度直方图,数值最大的方向作为该关键点的方向。
三、关键点的特征描述
每个关键点用一个向量来描述。
描述的方法就是取这个关键点在二维领域空间内的梯度值,
(1)取该点周围的4×4个区域,每个区域内含多个像素点
(2)每个区域的坐标轴旋转到该关键点的主方向上
(3)将子区域内的像素点的梯度值分配到8个方向上,计算其权值。
这样对于一个关键点,有4× 4× 8 = 128特征值。

SIFT的产生就是这样,对于一张输入图片,假设对其找到了K个关键点,他就有K× 128维的SIFT特征。
[Computer Vision] SIFT特征学习笔记的更多相关文章
- LBP特征 学习笔记
这几天一直在做人脸识别的项目,有用到LBP特征,但是毫无头绪,师姐这几天也比较忙,没有时间来指导我,随自己找相应的介绍LBP的博文来看,现在总算有了一个大体的思路了,就写下来吧 注:参考博文: 目标检 ...
- Learning ROS for Robotics Programming Second Edition学习笔记(五) indigo computer vision
中文译著已经出版,详情请参考:http://blog.csdn.net/ZhangRelay/article/category/6506865 Learning ROS for Robotics Pr ...
- 【学习笔记】SIFT尺度不变特征 (配合UCF-CRCV课程视频)
SIFT尺度不变特征 D. Lowe. Distinctive image features from scale-invariant key points, IJCV 2004 -Lecture 0 ...
- [学习笔记] CS131 Computer Vision: Foundations and Applications:Lecture 1 课程介绍
课程大纲:http://vision.stanford.edu/teaching/cs131_fall1718/syllabus.html 课程定位: 课程交叉: what is (computer) ...
- [学习笔记] CS131 Computer Vision: Foundations and Applications:Lecture 2 颜色和数学基础
大纲 what is color? The result of interaction between physical light in the environment and our visual ...
- [学习笔记] CS131 Computer Vision: Foundations and Applications:Lecture 4 像素和滤波器
Background reading: Forsyth and Ponce, Computer Vision Chapter 7 Image sampling and quantization Typ ...
- Sparse Filtering 学习笔记(二)好特征的刻画
Sparse Filtering 是一个用于提取特征的无监督学习算法,与通常特征学习算法试图建模训练数据的分布的做法不同,Sparse Filtering 直接对训练数据的特征分布进行分析,在所谓 ...
- SIFT特征点检测学习一(转载)
新手上路,先转载学习tornadomeet的博客:http://www.cnblogs.com/tornadomeet/archive/2012/08/16/2643168.html 特征点检测学习_ ...
- ArcGIS案例学习笔记-聚类点的空间统计特征
ArcGIS案例学习笔记-聚类点的空间统计特征 联系方式:谢老师,135-4855-4328,xiexiaokui@qq.com 目的:对于聚集点,根据分组字段case field,计算空间统计特征 ...
随机推荐
- PC-计算机动行命令里的密密!系统管理程序!
1. gpedit.msc-----组策略 3. Nslookup-------IP地址侦测器 4. explorer-------打开资源管理器 5. logoff---------注销 ...
- C#- Winform最小化到托盘
实现前先拉一个notifyIcon控件,在Icon属性中加入一个ICON小图标,然后具体的代码实现如下: using System; using System.Collections.Generic; ...
- C#是怎么获取窗口标题的
博客搬到了fresky.github.io - Dawei XU,请各位看官挪步.最新的一篇是:C#是怎么获取窗口标题的.
- 部署服务--NLB
通过服务部署NLB,是对某一层(一层下面可以自定义VM实例数量)服务下的多台VM进行NLB,而不是对多个层进行NLB.需要先进行如下准备: 1.VM需要使用静态IP和静态MAC,所以需要先在进行NLB ...
- [Webpack 2] Add Code Coverage to tests in a Webpack project
How much of your code runs during unit testing is an extremely valuable metric to track. Utilizing c ...
- SignalR安装以及安装问题
正常节奏 介绍 SignalR 是 ASP.NET 团队正在开发的一个 Microsoft .NET Framework 库和 jQuery 插件,可能包括在以后版本的 ASP.NET 平台中. 它提 ...
- C++面试题算法
#include <iostream> #include <string> using namespace std ; /* 题目:给一个字符串.例如 "ababc& ...
- jedis应用实例
最近将redis整合到项目中,将redis作为cache使用,未来进一步作为消息推送使用.我通过jedis和spring配置实现操作redis. spring配置 <!-- redis配置 -- ...
- JVM笔记7:类加载器
虚拟机设计团队把类加载阶段中的"通过一个类的全限定名来获取描述此类的二进制字节流"这个动作放到Java虚拟机外部实现,以便让应用程序自己决定如何去获取所需要的类,实现这个动作的代码 ...
- sqlserver 连不上的问题
tcp ip 属性 ipall 属性改为1433