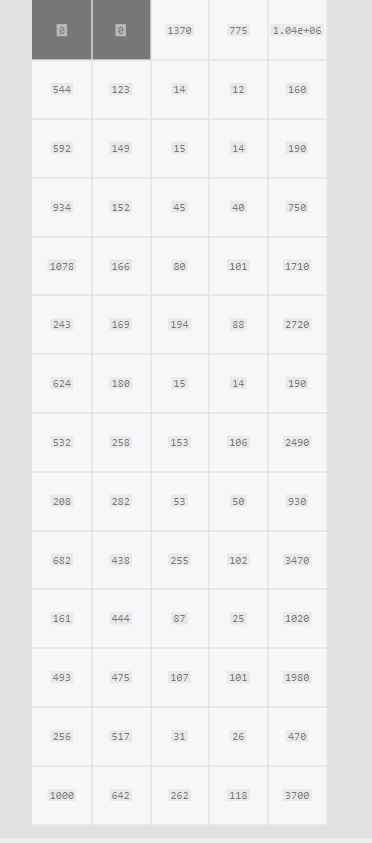
OpenCV中的新函数connectedComponentsWithStats使用
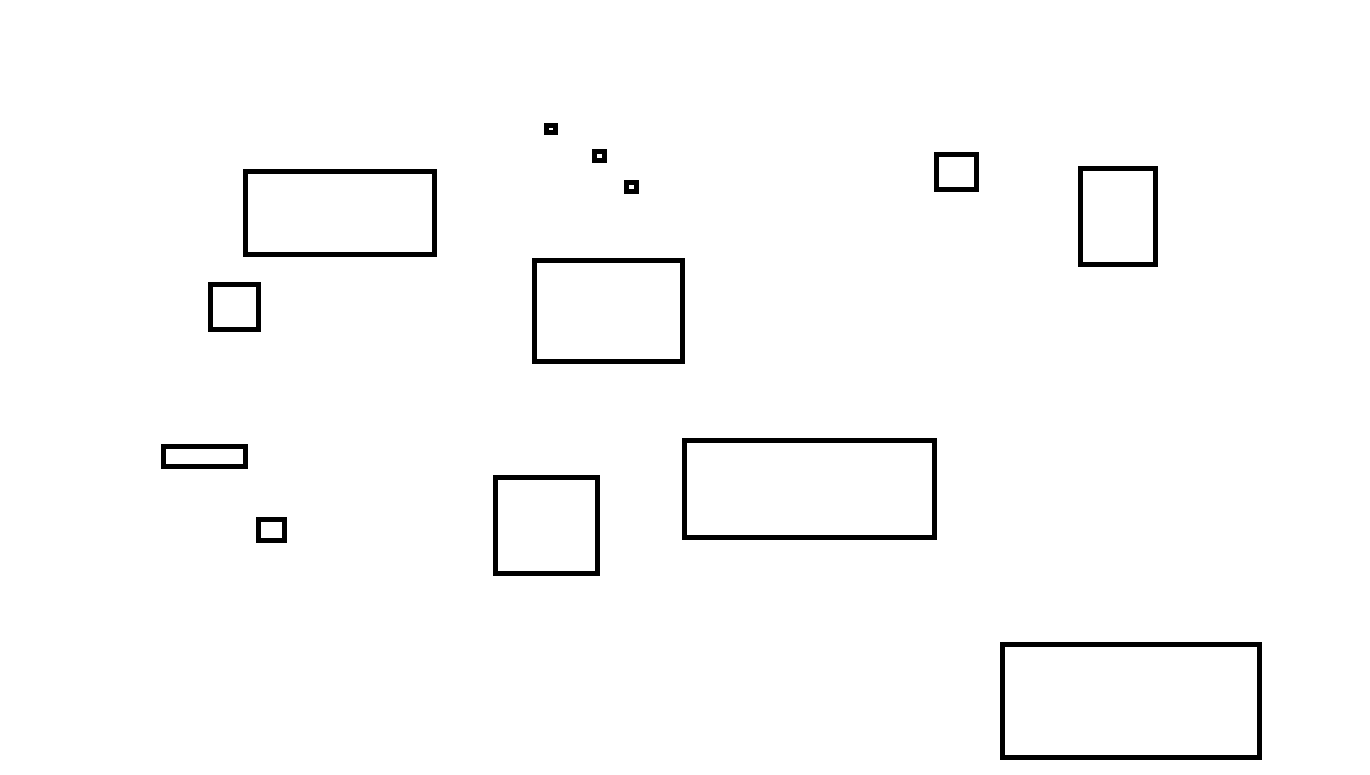
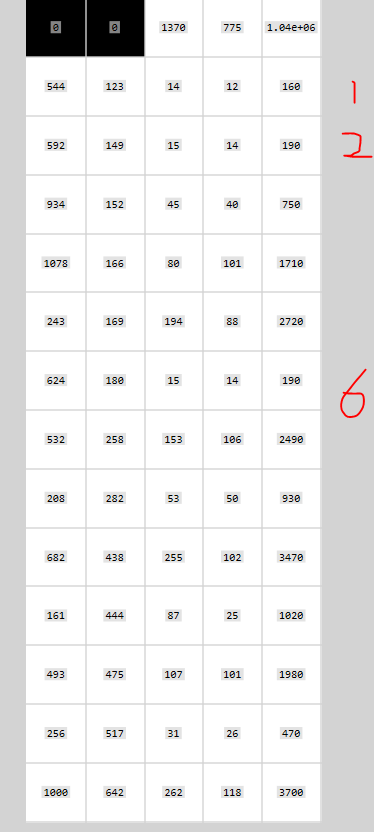
主要内容:对比新旧函数,用于过滤原始图像中轮廓分析后较小的区域,留下较大区域。
}
);
cv::waitKey();
OpenCV中的新函数connectedComponentsWithStats使用的更多相关文章
- OpenCV中的绘图函数-OpenCV步步精深
OpenCV 中的绘图函数 画线 首先要为画的线创造出环境,就要生成一个空的黑底图像 img=np.zeros((512,512,3), np.uint8) 这是黑色的底,我们的画布,我把窗口名叫做i ...
- 【计算机视觉】OpenCV中直方图处理函数简述
计算直方图calcHist 直方图是对数据集合的统计 ,并将统计结果分布于一系列提前定义的bins中.这里的数据不只指的是灰度值 ,统计数据可能是不论什么能有效描写叙述图像的特征. 如果有一个矩阵包括 ...
- OpenCV中的常用函数
1.cvLoadImage:将图像文件加载至内存: 2.cvNamedWindow:在屏幕上创建一个窗口: 3.cvShowImage:在一个已创建好的窗口中显示图像: 4.cvWaitKey:使程序 ...
- 5、opencv中的绘图函数
1.目标 a.学习使用 OpenCV 绘制不同几何图形 b. 你将会学习到这些函数: cv2.line(), cv2.circle(), cv2.rectangle(),cv2.ellipse(),c ...
- OpenCV中的绘图函数
OpenCV可以用来绘制不同的集合图形,包括直线,矩形,圆,椭圆,多边形以及在图片上添加文字.用到的绘图函数包括 cv2.line(),cv2.circle(),cv2.rectangle() ,cv ...
- opencv中自适应阈值函数的实现(c++)
根据<面向飞机蒙皮接缝的线结构光检测技术研究_张卡>论文中的原理,编写了自适应阈值函数 原理: //计算灰度最大最小值 void MaxGrayValue(Mat image,int &a ...
- Opencv中的阈值函数
OpenCV基础——threshold函数的使用 图像的二值化就是将图像上的像素点的灰度值设置为0或255,这样将使整个图像呈现出明显的黑白效果. 参数原型 参数说明 src:源图像,可以为8位的灰度 ...
- opencv中的exp32f函数
exp32f opencv的exp函数和cmath的exp函数在精度上存在一定差异,通过查找源码,发现了这么一段实现.代码如下: 点击查看代码 #define EXPTAB_SCALE 6 #defi ...
- opencv中的缩放函数
图像处理里面缩放操作是比较常见的: 最近邻插值:类似简单映射的处理方式,目标图像w1,h1,原始图像w0,h0,则在目标图像上的点(x,y)的像素点实际对应原始图上(x*w0/w1,y*h0/h1)的 ...
随机推荐
- c++11——改进容器性能
使用emplace_back就地构造 emplace_back能就地通过参数构造对象,不需要拷贝或者移动内存,相比push_back能更好的避免内存的拷贝和移动,使得容器插入元素的性能得到进一步提升. ...
- 【CSS系列】块级元素和行内元素
块级元素: 块级元素生成一个元素框,默认会填充其父元素的内容区,旁边不能有其他元素,换句话说,它在元素框之前和之后生成了“分隔符”. 列表项是块级额元素的一个特例,除了表现方式与其他块元素一致,列表项 ...
- window.postMessage跨文档通信
window.postMessage 1.浏览器兼容情况:IE8+.chrome.firefox等较新浏览器都至此. 2.使用方法: a.otherWindow.postMessage( messag ...
- js 数组函数
Array.prototype.join Array.prototype.reverse Array.prototype.sort Array.prototype.concat Array.proto ...
- Ubuntu16.04安装Nessus和MSF
一.Nessus篇: 1.参考文献:https://www.cnblogs.com/shamojituan/p/6511208.html 2.下载地址:https://downloads.nessus ...
- react路由守卫
react没有vue那样的路由钩子beforeEach,实现登陆验证. 实现效果:如果没有登陆,就跳转到登陆界面,如果登陆过浏览器存有登陆信息就跳转到所输入的路由界面,如果该路由不存在则跳到404页面 ...
- Css-常用css
/*怪异盒子模型*/ .box { box-sizing: border-box; } /*水平居中的内联块级*/ .inBlock { display: inline-block; vertical ...
- Android 小例子服务端
这是之前发布的Android项目的服务端源码,只是简单的根据请求返回了一些测试数据,没有实现对数据库的操作,可以根据需求自己实现. 这是mvc4 WebAPI项目,需要用vs2012打开. 如果是用的 ...
- poj2376 Cleaning Shifts【线段树】【DP】
Cleaning Shifts Time Limit: 1000MS Memory Limit: 65536K Total Submissions: 32561 Accepted: 7972 ...
- Oracle系统结构之修改oracle内存参数
Linux主机16g内存,修改oracle数据库内存参数: 1.编辑/etc/fstab文件:针对tmpfs行将defaults改成defaults,size=12g(千万注意格式,不能出现错误) 修 ...