操作系统 -- SLAB如何分配内存
在Linux系统中比页更小的内存对象要怎么分配呢? -- SLAB,学习下SLAB分配器的原理和实现
SLAB
与Cosmos物理页面管理器一样,Linux中的伙伴系统是以页面为最小单位分配到,现实更多要以内核对象为单位分配内存,其实更具体一点说,就是根据内核对象的实例变量大小来申请和释放内存空间,这些数据结构实例变量的大小通常从几十字节到几百字节不等,远远小于一个页面的大小。
如果一个几十字节大小的数据结构实例变量,就要为此分配一个页面,这无疑是对宝贵物理内存的一种巨大浪费,因此一个更好的技术方案应运而生,就是 Slab 分配器(由 Sun 公司的雇员 Jeff Bonwick 在 Solaris 2.4 中设计并实现)。
走进SLAB对象
何为 SLAB 对象?
在 SLAB 分配器中,它把一个内存页面或者一组连续的内存页面,划分成大小相同的块,其中这一个小的内存块就是 SLAB 对象,但是这一组连续的内存页面中不只是 SLAB 对象,还有 SLAB 管理头和着色区。
SLAB示意图:
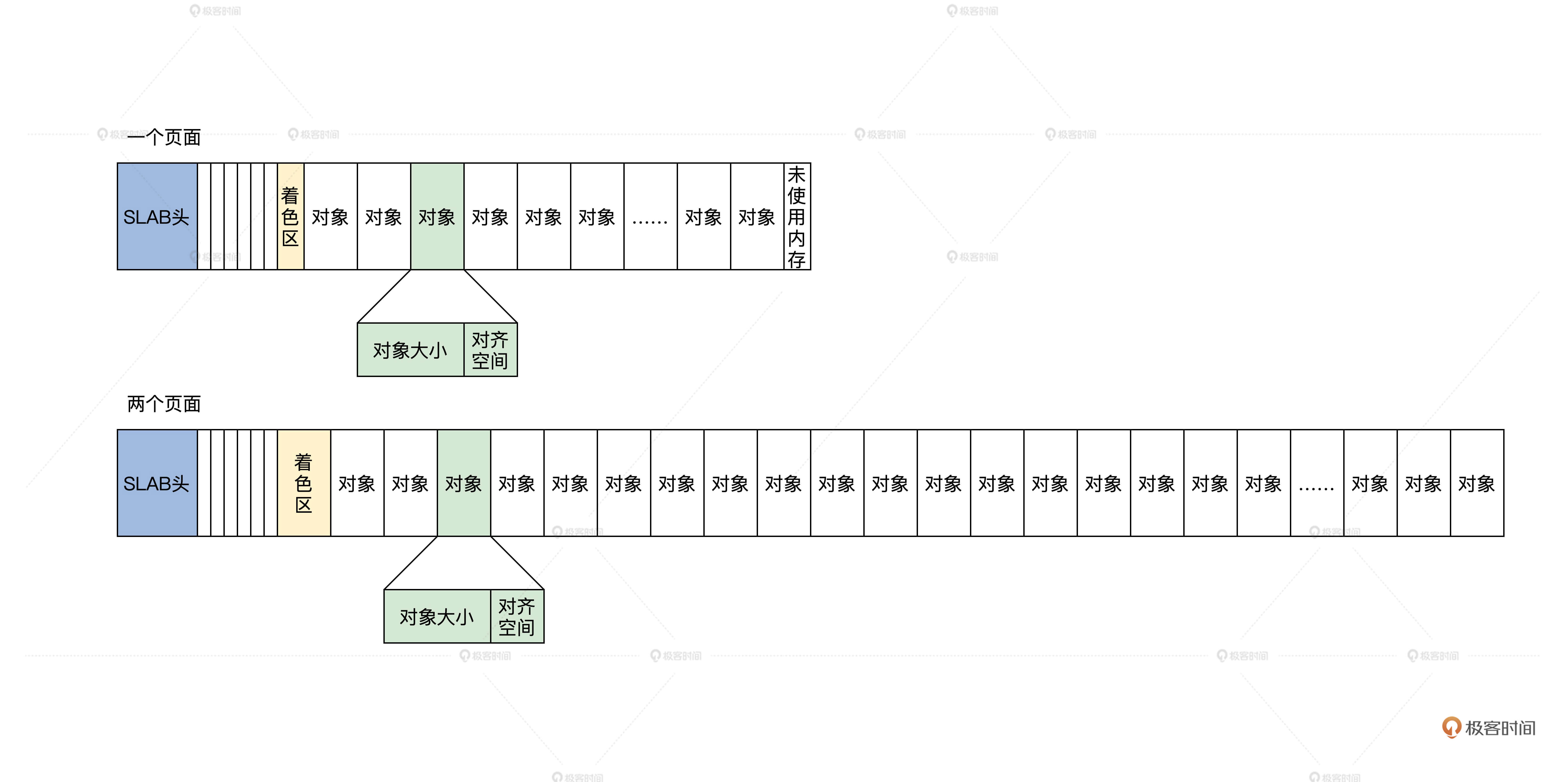
上图中有一个内存页面和两个内存页面的 SLAB,还有着色区。
何为着色区
这个着色区也是一块动态的内存块,建立 SLAB 时才会设置它的大小,目的是为了错开不同 SLAB 中的对象地址,降低硬件 Cache 行中的地址争用,以免导致 Cache 抖动效应,整个系统性能下降。
SLAB 头其实是一个数据结构,但是它不一定放在保存对象内存页面的开始。通常会有一个保存 SLAB 管理头的 SLAB,在 Linux 中,SLAB 管理头用 kmem_cache 结构来表示,代码如下。
struct array_cache {
unsigned int avail;
unsigned int limit;
void *entry[];
};
struct kmem_cache {
//是每个CPU一个array_cache类型的变量,cpu_cache是用于管理空闲对象的
struct array_cache __percpu *cpu_cache;
unsigned int size; //cache大小
slab_flags_t flags;//slab标志
unsigned int num;//对象个数
unsigned int gfporder;//分配内存页面的order
gfp_t allocflags;
size_t colour;//着色区大小
unsigned int colour_off;//着色区的开始偏移
const char *name;//本SLAB的名字
struct list_head list;//所有的SLAB都要链接起来
int refcount;//引用计数
int object_size;//对象大小
int align;//对齐大小
struct kmem_cache_node *node[MAX_NUMNODES];//指向管理kmemcache的上层结构
};
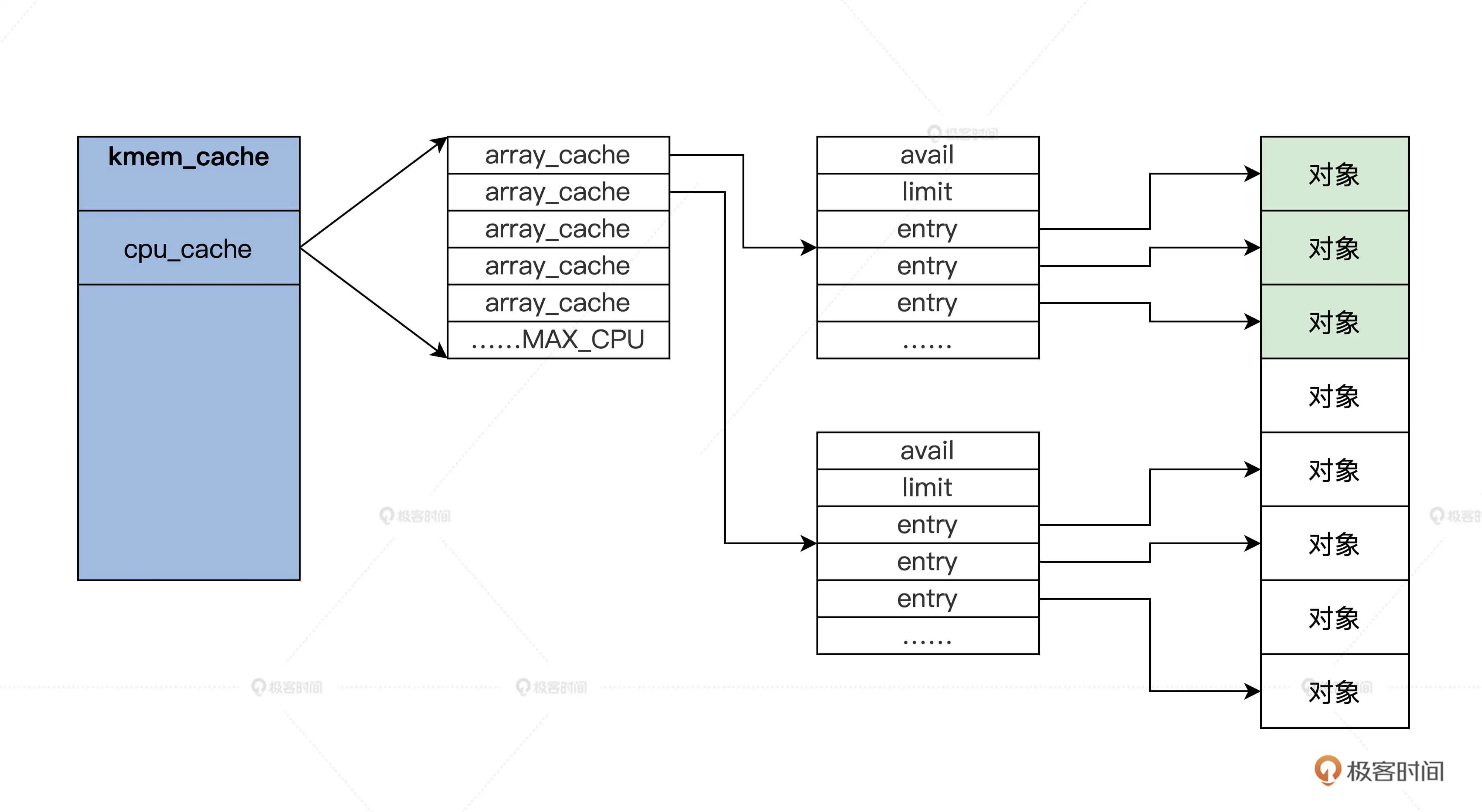
上述代码中,有多少个 CPU,就会有多少个 array_cache 类型的变量。这种为每个 CPU 构造一个变量副本的同步机制,就是每 CPU 变量(per-cpu-variable)。array_cache 结构中"entry[]"表示了一个遵循 LIFO 顺序的数组,"avail"和"limit"分别指定了当前可用对象的数目和允许容纳对象的最大数目。
kmem_cache结构图解:
第一个kmem_cache
第一个 kmem_cache 是哪里来的呢?其实它是静态定义在代码中的,如下所示。
static struct kmem_cache kmem_cache_boot = {
.batchcount = 1,
.limit = BOOT_CPUCACHE_ENTRIES,
.shared = 1,
.size = sizeof(struct kmem_cache),
.name = "kmem_cache",
};
void __init kmem_cache_init(void)
{
int i;
//指向静态定义的kmem_cache_boot
kmem_cache = &kmem_cache_boot;
for (i = 0; i < NUM_INIT_LISTS; i++)
kmem_cache_node_init(&init_kmem_cache_node[i]);
//建立保存kmem_cache结构的kmem_cache
create_boot_cache(kmem_cache, "kmem_cache",
offsetof(struct kmem_cache, node) +
nr_node_ids * sizeof(struct kmem_cache_node *),
SLAB_HWCACHE_ALIGN, 0, 0);
//加入全局slab_caches链表中
list_add(&kmem_cache->list, &slab_caches);
{
int nid;
for_each_online_node(nid) {
init_list(kmem_cache, &init_kmem_cache_node[CACHE_CACHE + nid], nid);
init_list(kmalloc_caches[KMALLOC_NORMAL][INDEX_NODE], &init_kmem_cache_node[SIZE_NODE + nid], nid);
}
}
//建立kmalloc函数使用的的kmem_cache
create_kmalloc_caches(ARCH_KMALLOC_FLAGS);
}
管理 kmem_cache
我们建好了第一个 kmem_cache,以后 kmem_cache 越来越多,而且我们并没有看到 kmem_cache 结构中有任何指向内存页面的字段,但在 kmem_cache 结构中有个保存 kmem_cache_node 结构的指针数组。
kmem_cache_node 结构是每个内存节点对应一个,它就是用来管理 kmem_cache 结构的,它开始是静态定义的,初始化时建立了第一个 kmem_cache 结构之后,init_list 函数负责一个个分配内存空间,代码如下所示。
#define NUM_INIT_LISTS (2 * MAX_NUMNODES)
//定义的kmem_cache_node结构数组
static struct kmem_cache_node __initdata init_kmem_cache_node[NUM_INIT_LISTS];
struct kmem_cache_node {
spinlock_t list_lock;//自旋锁
struct list_head slabs_partial;//有一部分空闲对象的kmem_cache结构
struct list_head slabs_full;//没有空闲对象的kmem_cache结构
struct list_head slabs_free;//对象全部空闲kmem_cache结构
unsigned long total_slabs; //一共多少kmem_cache结构
unsigned long free_slabs; //空闲的kmem_cache结构
unsigned long free_objects;//空闲的对象
unsigned int free_limit;
};
static void __init init_list(struct kmem_cache *cachep, struct kmem_cache_node *list,
int nodeid)
{
struct kmem_cache_node *ptr;
//分配新的 kmem_cache_node 结构的空间
ptr = kmalloc_node(sizeof(struct kmem_cache_node), GFP_NOWAIT, nodeid);
BUG_ON(!ptr);
//复制初始时的静态kmem_cache_node结构
memcpy(ptr, list, sizeof(struct kmem_cache_node));
spin_lock_init(&ptr->list_lock);
MAKE_ALL_LISTS(cachep, ptr, nodeid);
//设置kmem_cache_node的地址
cachep->node[nodeid] = ptr;
}
我们第一次分配对象时,肯定没有对应的内存页面存放对象,那么 SLAB 模块就会调用 cache_grow_begin 函数获取内存页面,然后用获取的页面来存放对象,我们一起来看看代码。
static void slab_map_pages(struct kmem_cache *cache, struct page *page,void *freelist)
{
//页面结构指向kmem_cache结构
page->slab_cache = cache;
//指向空闲对象的链表
page->freelist = freelist;
}
static struct page *cache_grow_begin(struct kmem_cache *cachep,
gfp_t flags, int nodeid)
{
void *freelist;
size_t offset;
gfp_t local_flags;
int page_node;
struct kmem_cache_node *n;
struct page *page;
WARN_ON_ONCE(cachep->ctor && (flags & __GFP_ZERO));
local_flags = flags & (GFP_CONSTRAINT_MASK|GFP_RECLAIM_MASK);
//获取页面
page = kmem_getpages(cachep, local_flags, nodeid);
//获取页面所在的内存节点号
page_node = page_to_nid(page);
//根据内存节点获取对应kmem_cache_node结构
n = get_node(cachep, page_node);
//分配管理空闲对象的数据结构
freelist = alloc_slabmgmt(cachep, page, offset,
local_flags & ~GFP_CONSTRAINT_MASK, page_node);
//让页面中相关的字段指向kmem_cache和空闲对象
slab_map_pages(cachep, page, freelist);
//初始化空闲对象管理数据
cache_init_objs(cachep, page);
return page;
}
static void cache_grow_end(struct kmem_cache *cachep, struct page *page)
{
struct kmem_cache_node *n;
void *list = NULL;
if (!page)
return;
//初始化结page构的slab_list链表
INIT_LIST_HEAD(&page->slab_list);
//根据内存节点获取对应kmem_cache_node结构.
n = get_node(cachep, page_to_nid(page));
spin_lock(&n->list_lock);
//slab计数增加
n->total_slabs++;
if (!page->active) {
//把这个page结构加入到kmem_cache_node结构的空闲链表中
list_add_tail(&page->slab_list, &n->slabs_free);
n->free_slabs++;
}
spin_unlock(&n->list_lock);
}
上述代码中的注释已经很清楚了,cache_grow_begin 函数会为 kmem_cache 结构分配用来存放对象的页面,随后会调用与之对应的 cache_grow_end 函数,把这页面挂载到 kmem_cache_node 结构的链表中,并让页面指向 kmem_cache 结构。
这样 kmem_cache_node,kmem_cache,page 这三者之间就联系起来了。你再看一下后面的图,就更加清楚了。
SLAB全局结构示意图:
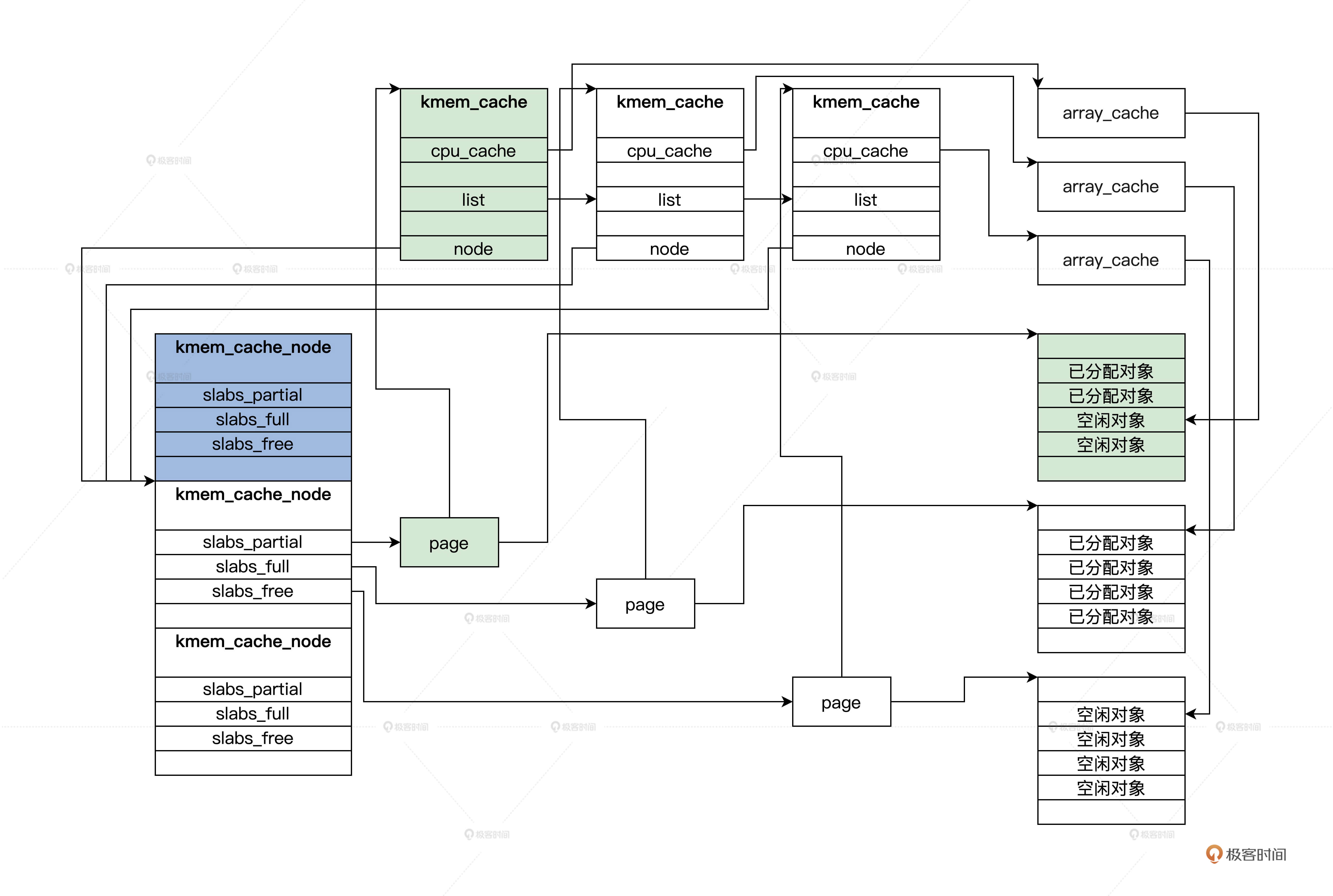
上图中 page 可能是一组连续的 pages,但是只会把第一个 page 挂载到 kmem_cache_node 中,同时,在 slab_map_pages 函数中又让 page 指向了 kmem_cache。
但你要特别留意 kmem_cache_node 中的三个链表,它们分别挂载的 pages,有一部分是空闲对象的 page、还有对象全部都已经分配的 page,以及全部都为空闲对象的 page。这是为了提高分配时查找 kmem_cache 的性能。
SLAB分配对象的过程
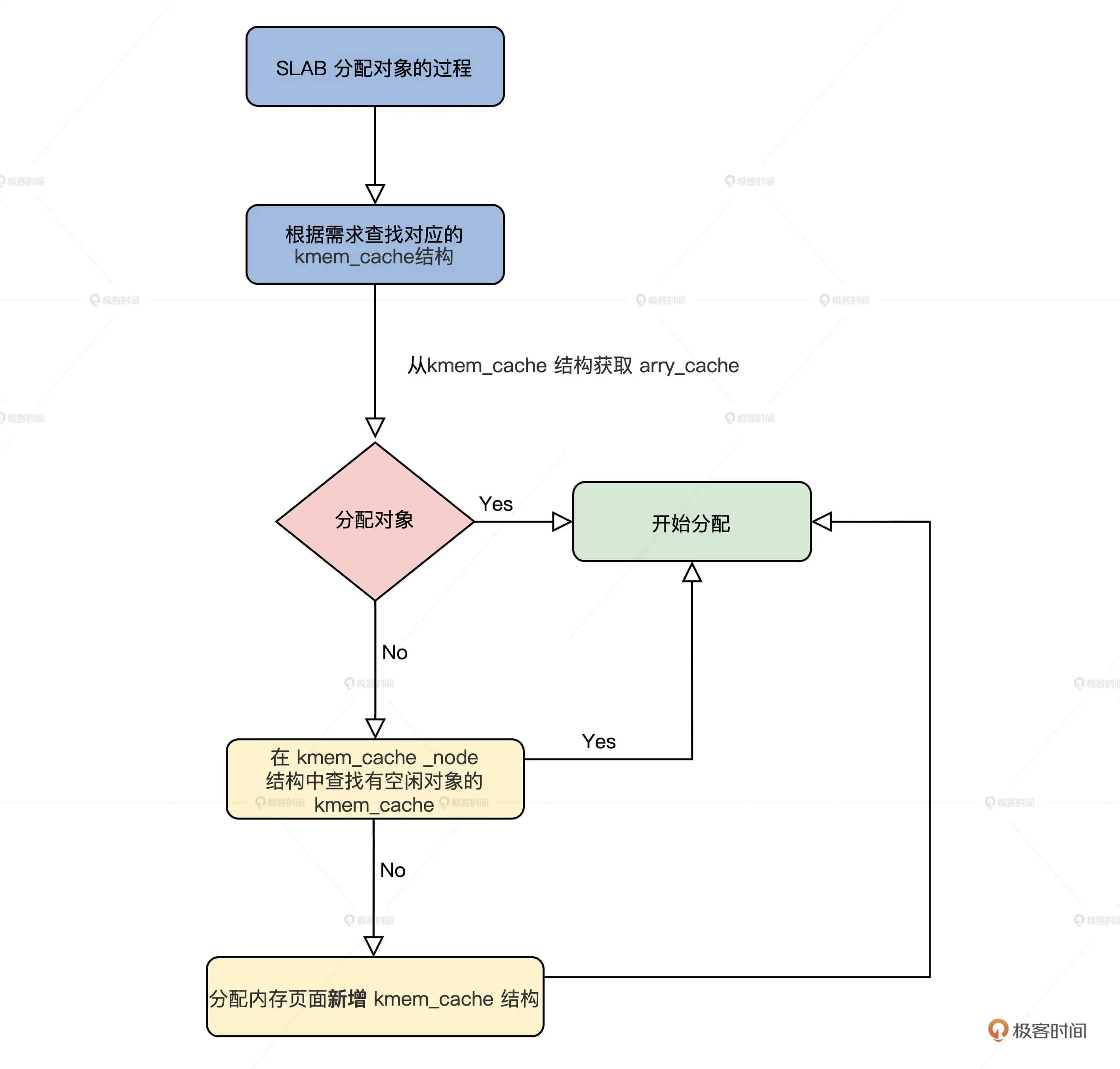
有了前面对 SLAB 数据结构的了解,SLAB 分配对象的过程你自己也能推导出来,无非是根据请求分配对象的大小,查找对应的 kmem_cache 结构,接着从这个结构中获取 arry_cache 结构,然后分配对象。
如果没有空闲对象了,就需要在 kmem_cache 对应的 kmem_cache_node 结构中查找有空闲对象的 kmem_cache。如果还是没找到,最后就要分配内存页面新增 kmem_cache 结构了。
SLAB分配对象的过程图解:
下面我们从接口开始了解这些过程。
SLAB 分配接口
其实在 Linux 内核中,用的最多的是 kmalloc 函数,经常用于分配小的缓冲区,或者数据结构分配实例空间,这个函数就是 SLAB 分配接口,它是用来分配对象的,这个对象就是一小块内存空间。
下面一起来看看代码。
static __always_inline void *__do_kmalloc(size_t size, gfp_t flags,unsigned long caller)
{
struct kmem_cache *cachep;
void *ret;
if (unlikely(size > KMALLOC_MAX_CACHE_SIZE))
return NULL;
//查找size对应的kmem_cache
cachep = kmalloc_slab(size, flags);
if (unlikely(ZERO_OR_NULL_PTR(cachep)))
return cachep;
//分配对象
ret = slab_alloc(cachep, flags, caller);
return ret;
}
void *__kmalloc(size_t size, gfp_t flags)
{
return __do_kmalloc(size, flags, _RET_IP_);
}
static __always_inline void *kmalloc(size_t size, gfp_t flags)
{
return __kmalloc(size, flags);
}
上面代码的流程很简单,就是在 __do_kmalloc 函数中,查找出分配大小对应的 kmem_cache 结构,然后调用 slab_alloc 函数进行分配。可以说,slab_alloc 函数才是 SLAB 的接口函数,但是它的参数中必须要有 kmem_cache 结构。
如何查找kmem_cache结构
由于 SLAB 的接口函数 slab_alloc,它的参数中必须要有 kmem_cache 结构指针,指定从哪个 kmem_cache 结构分配对象,所以在调用 slab_alloc 函数之前必须给出 kmem_cache 结构。
我们怎么查找到它呢?这就需要调用 kmalloc_slab 函数了,代码如下所示。
enum kmalloc_cache_type {
KMALLOC_NORMAL = 0,
KMALLOC_RECLAIM,
#ifdef CONFIG_ZONE_DMA
KMALLOC_DMA,
#endif
NR_KMALLOC_TYPES
};
struct kmem_cache *kmalloc_caches[NR_KMALLOC_TYPES][KMALLOC_SHIFT_HIGH + 1] __ro_after_init ={ static u8 size_index[24] __ro_after_init = {
3, /* 8 */
4, /* 16 */
5, /* 24 */
5, /* 32 */
6, /* 40 */
6, /* 48 */
6, /* 56 */
6, /* 64 */
1, /* 72 */
1, /* 80 */
1, /* 88 */
1, /* 96 */
7, /* 104 */
7, /* 112 */
7, /* 120 */
7, /* 128 */
2, /* 136 */
2, /* 144 */
2, /* 152 */
2, /* 160 */
2, /* 168 */
2, /* 176 */
2, /* 184 */
2 /* 192 */
};
//根据分配标志返回枚举类型,其实是0、1、2其中之一
static __always_inline enum kmalloc_cache_type kmalloc_type(gfp_t flags)
{
#ifdef CONFIG_ZONE_DMA
if (likely((flags & (__GFP_DMA | __GFP_RECLAIMABLE)) == 0))
return KMALLOC_NORMAL;
return flags & __GFP_DMA ? KMALLOC_DMA : KMALLOC_RECLAIM;
#else
return flags & __GFP_RECLAIMABLE ? KMALLOC_RECLAIM : KMALLOC_NORMAL;
#endif
}
struct kmem_cache *kmalloc_slab(size_t size, gfp_t flags)
{
unsigned int index;
//计算出index
if (size <= 192) {
if (!size)
return ZERO_SIZE_PTR;
index = size_index[size_index_elem(size)];
} else {
if (WARN_ON_ONCE(size > KMALLOC_MAX_CACHE_SIZE))
return NULL;
index = fls(size - 1);
}
return kmalloc_caches[kmalloc_type(flags)][index];
}
从上述代码,不难发现 kmalloc_caches 就是个全局的二维数组,kmalloc_slab 函数只是根据分配大小和分配标志计算出了数组下标,最后取出其中 kmem_cache 结构指针。
那么 kmalloc_caches 中的 kmem_cache,它又是谁建立的呢?我们还是接着看代码
struct kmem_cache *__init create_kmalloc_cache(const char *name,
unsigned int size, slab_flags_t flags,
unsigned int useroffset, unsigned int usersize)
{
//从第一个kmem_cache中分配一个对象放kmem_cache
struct kmem_cache *s = kmem_cache_zalloc(kmem_cache, GFP_NOWAIT);
if (!s)
panic("Out of memory when creating slab %s\n", name);
//设置s的对齐参数,处理s的freelist就是arr_cache
create_boot_cache(s, name, size, flags, useroffset, usersize);
list_add(&s->list, &slab_caches);
s->refcount = 1;
return s;
}
//新建一个kmem_cache
static void __init new_kmalloc_cache(int idx, enum kmalloc_cache_type type, slab_flags_t flags)
{
if (type == KMALLOC_RECLAIM)
flags |= SLAB_RECLAIM_ACCOUNT;
//根据kmalloc_info中信息建立一个kmem_cache
kmalloc_caches[type][idx] = create_kmalloc_cache(
kmalloc_info[idx].name[type],
kmalloc_info[idx].size, flags, 0,
kmalloc_info[idx].size);
}
//建立所有的kmalloc_caches中的kmem_cache
void __init create_kmalloc_caches(slab_flags_t flags)
{
int i;
enum kmalloc_cache_type type;
for (type = KMALLOC_NORMAL; type <= KMALLOC_RECLAIM; type++) {
for (i = KMALLOC_SHIFT_LOW; i <= KMALLOC_SHIFT_HIGH; i++) {
if (!kmalloc_caches[type][i])
//建立一个新的kmem_cache
new_kmalloc_cache(i, type, flags);
if (KMALLOC_MIN_SIZE <= 32 && i == 6 &&
!kmalloc_caches[type][1])
new_kmalloc_cache(1, type, flags);
if (KMALLOC_MIN_SIZE <= 64 && i == 7 &&
!kmalloc_caches[type][2])
new_kmalloc_cache(2, type, flags);
}
}
}
到这里,__do_kmalloc 函数中根据分配对象大小查找的所有 kmem_cache 结构,我们就建立好了,保存在 kmalloc_caches 数组中。下面我们再去看看对象是如何分配的。
分配对象
下面我们从 slab_alloc 函数开始探索对象的分配过程,slab_alloc 函数的第一个参数就 kmem_cache 结构的指针,表示从该 kmem_cache 结构中分配对象。
static __always_inline void *slab_alloc(struct kmem_cache *cachep, gfp_t flags, unsigned long caller)
{
unsigned long save_flags;
void *objp;
//关中断
local_irq_save(save_flags);
//分配对象
objp = __do_cache_alloc(cachep, flags);
//恢复中断
local_irq_restore(save_flags);
return objp;
}
接口函数总是简单的,真正干活的是 __do_cache_alloc 函数,下面我们就来看看这个函数。
static inline void *____cache_alloc(struct kmem_cache *cachep, gfp_t flags)
{
void *objp;
struct array_cache *ac;
//获取当前cpu在cachep结构中的array_cache结构的指针
ac = cpu_cache_get(cachep);
//如果ac中的avail不为0,说明当前kmem_cache结构中freelist是有空闲对象
if (likely(ac->avail)) {
ac->touched = 1;
//空间对象的地址保存在ac->entry
objp = ac->entry[--ac->avail];
goto out;
}
objp = cache_alloc_refill(cachep, flags);
out:
return objp;
}
static __always_inline void *__do_cache_alloc(struct kmem_cache *cachep, gfp_t flags)
{
return ____cache_alloc(cachep, flags);
}
上述代码中真正做事的函数是 ____cache_alloc 函数,它首先获取了当前 kmem_cache 结构中指向 array_cache 结构的指针,找到它里面空闲对象的地址(如果你不懂 array_cache 结构,请回到 SLAB 对象那一小节复习),然后在 array_cache 结构中取出一个空闲对象地址返回,这样就分配成功了。
这个速度是很快的,如果 array_cache 结构中没有空闲对象了,就会调用 cache_alloc_refill 函数。那这个函数又干了什么呢?我们接着往下看。代码如下所示。
static struct page *get_first_slab(struct kmem_cache_node *n, bool pfmemalloc)
{
struct page *page;
assert_spin_locked(&n->list_lock);
//首先从kmem_cache_node结构中的slabs_partial链表上查看有没有page
page = list_first_entry_or_null(&n->slabs_partial, struct page,slab_list);
if (!page) {
//如果没有
n->free_touched = 1;
//从kmem_cache_node结构中的slabs_free链表上查看有没有page
page = list_first_entry_or_null(&n->slabs_free, struct page,slab_list);
if (page)
n->free_slabs--; //空闲slab计数减一
}
//返回page
return page;
}
static void *cache_alloc_refill(struct kmem_cache *cachep, gfp_t flags)
{
int batchcount;
struct kmem_cache_node *n;
struct array_cache *ac, *shared;
int node;
void *list = NULL;
struct page *page;
//获取内存节点
node = numa_mem_id();
ac = cpu_cache_get(cachep);
batchcount = ac->batchcount;
//获取cachep所属的kmem_cache_node
n = get_node(cachep, node);
shared = READ_ONCE(n->shared);
if (!n->free_objects && (!shared || !shared->avail))
goto direct_grow;
while (batchcount > 0) {
//获取kmem_cache_node结构中其它kmem_cache,返回的是page,而page会指向kmem_cache
page = get_first_slab(n, false);
if (!page)
goto must_grow;
batchcount = alloc_block(cachep, ac, page, batchcount);
}
must_grow:
n->free_objects -= ac->avail;
direct_grow:
if (unlikely(!ac->avail)) {
//分配新的kmem_cache并初始化
page = cache_grow_begin(cachep, gfp_exact_node(flags), node);
ac = cpu_cache_get(cachep);
if (!ac->avail && page)
alloc_block(cachep, ac, page, batchcount);
//让page挂载到kmem_cache_node结构的slabs_list链表上
cache_grow_end(cachep, page);
if (!ac->avail)
return NULL;
}
ac->touched = 1;
//重新分配
return ac->entry[--ac->avail];
}
调用 cache_alloc_refill 函数的过程,主要的工作都有哪些呢?
- 首先,获取了 cachep 所属的 kmem_cache_node。
- 然后调用 get_first_slab,获取 kmem_cache_node 结构还有没有包含空闲对象的 kmem_cache。但是请注意,这里返回的是 page,因为 page 会指向 kmem_cache 结构,page 所代表的物理内存页面,也保存着 kmem_cache 结构中的对象。
- 最后,如果 kmem_cache_node 结构没有包含空闲对象的 kmem_cache 了,就必须调用 cache_grow_begin 函数,找伙伴系统分配新的内存页面,而且还要找第一个 kmem_cache 分配新的对象,来存放 kmem_cache 结构的实例变量,并进行必要的初始化。
这些步骤完成之后,再调用 cache_grow_end 函数,把刚刚分配的 page 挂载到 kmem_cache_node 结构的 slabs_list 链表上。因为 cache_grow_begin 和 cache_grow_end 函数在前面已经分析过了,这里不再赘述。
操作系统 -- SLAB如何分配内存的更多相关文章
- linux设备驱动归纳总结(五):1.在内核空间分配内存【转】
本文转载自:http://blog.chinaunix.net/uid-25014876-id-79134.html linux设备驱动归纳总结(五):1.在内核空间分配内存 xxxxxxxxxxxx ...
- Linux进程分配内存的两种方式--brk() 和mmap()
如何查看进程发生缺页中断的次数? 用ps -o majflt,minflt -C program命令查看. majflt代表major fault,中文名叫大错误,minflt代表minor faul ...
- 内存分配的原理__进程分配内存有两种方式,分别由两个系统调用完成:brk和mmap(不考虑共享内存)
如何查看进程发生缺页中断的次数? 用ps -o majflt,minflt -C program命令查看. majflt代表major fault,中文名叫大错误,minflt代表minor faul ...
- alloc_page分配内存空间--Linux内存管理(十七)
1 前景回顾 在内核初始化完成之后, 内存管理的责任就由伙伴系统来承担. 伙伴系统基于一种相对简单然而令人吃惊的强大算法. Linux内核使用二进制伙伴算法来管理和分配物理内存页面, 该算法由Know ...
- innodb分配内存
innodb分配内存有三种方法 1)使用OS的malloc 2)使用innodb自己实现的内存分配方法 3)使用goolge的Tmalloc innodb引擎分析之内存管理 在my.cn配置文件中可设 ...
- Linux设备驱动程序学习之分配内存
内核为设备驱动提供了一个统一的内存管理接口,所以模块无需涉及分段和分页等问题. 我已经在第一个scull模块中使用了 kmalloc 和 kfree 来分配和释放内存空间. kmalloc 函数内幕 ...
- 《Linux Device Drivers》第八章 分配内存——note
本章主要介绍Linux内核的内存管理. kmalloc函数的内幕 不正确所获取的内存空间清零 分配的区域在物理内存中也是连续的 flags參数 <linux/slab.h> <lin ...
- 为什么使用剪切板时都用GlobalAlloc分配内存(历史遗留问题,其实没关系了)
我在使用剪切板时,发现通用的都是使用GlobalAlloc来分配内存,我就想不是说在Win32中GlobalAlloc和LocalAlloc是一样的那为什么不用LocalAlloc呢,原谅我的好奇心吧 ...
- 【操作系统之十】内存分页管理与swap
一.虚拟内存电脑里内存分内存条(这里我们叫物理内存)和硬盘,内存条保存程序运行时数据,硬盘持久保存数据.那么虚拟内存是什么? 程序运行会启动一个进程,进程里有程序段.全局数据.栈和堆,这些都会加载到内 ...
- 进程分配内存的两种方式--brk() 和mmap()(不设计共享内存)(转)
如何查看进程发生缺页中断的次数? 用ps -o majflt,minflt -C program命令查看. majflt代表major fault,中文名叫大错误,minflt代表minor faul ...
随机推荐
- 甲壳虫ADB助手-让你轻松不用电脑就能卸载电视自带软件
甲壳虫ADB助手是一款非常使用的安卓ADB调试工具,它适用于各种安卓系统设备,包括手机.平板.手表和电视等等,可以帮助用户直接在手机上对设备进行ADB调试,而且不需要ROOT,支持无线配对连接,让用户 ...
- Flink学习(三) 批流版本的wordcount JAVA版本
Flink 开发环境通常来讲,任何一门大数据框架在实际生产环境中都是以集群的形式运行,而我们调试代码大多数会在本地搭建一个模板工程,Flink 也不例外. Flink 一个以 Java 及 Scala ...
- 远程debug
1. 在idea中添加远程服务器信息 打开应用配置 填写配置 1. 在 + 选择 Remote JVM Debug 2. 在 2 处填写名称,任意 3. 在 3 填写服务器ip 4. 在 4 填写de ...
- 代码托管平台对比分析:Gitee与GitLab
一.Gitee:本土化服务的深度实践者 Gitee凭借对中国开发者需求的精准洞察,提供了多项针对性优化功能,尤其适合国内团队: 高速稳定的访问体验 服务器均部署于国内,代码拉取.推送及CI/CD流程的 ...
- [解决方案]无法加载文件 C:\Users\Administrator\AppData\Roaming\npm\vue.ps1,因为在此系统中禁止执行脚本
前言 windows环境,安装vue-cli 脚手架. 安装成功,但是执行 vue -V 报错了. 报错信息:无法加载文件 C:\Users\Administrator\AppData\Roaming ...
- 【MathType】word2016数学公式编号
问题 毕业论文排版中,对数学公式需要类似(3-1)的格式. 解决技巧 在写论文初稿的时候,先不要于公式的编号,先给它编一个号,比如(3) (2) (4)的. 最后写完了以后,再再添加section , ...
- 事务及mysql中的隔离级别
事务,一个或一组sql语句组成的执行单元,是最小的执行单元,要么全执行,要么全不执行.如果单元中某条sql语句执行失败,整个单元将会回滚,所有受影响的数据返回到事务开始前的状态. 事务具有ACID四个 ...
- 如何限制goroutine的数量
为什么要控制goroutine的数量? 在我们开发过程中,如果不对goroutine加以控制而进行滥用的话,可能会导致服务整体崩溃.比如耗尽系统资源导致程序崩溃,或者CPU使用率过高导致系统忙不过来. ...
- Go配置管理神器—Viper中文教程
Viper中文教程 Viper是适用于Go应用程序的完整配置解决方案.它被设计用于在应用程序中工作,并且可以处理所有类型的配置需求和格式. 安装 go get github.com/spf13/vip ...
- 使用`forEach`方法前后的代码逐步简化过程
简化前的完整循环代码 首先,我们使用传统的for-each循环遍历HashMap: import java.util.HashMap; import java.util.Map; public cla ...