Crashing Robots 分类: POJ 2015-06-29 11:44 10人阅读 评论(0) 收藏
| Time Limit: 1000MS | Memory Limit: 65536K | |
| Total Submissions: 8340 | Accepted: 3607 |
Description
occupy a circular floor space with a diameter of 1 meter. Assume there are N robots, numbered from 1 through N. You will get to know the position and orientation of each robot, and all the instructions, which are carefully (and mindlessly) followed by the
robots. Instructions are processed in the order they come. No two robots move simultaneously; a robot always completes its move before the next one starts moving.
A robot crashes with a wall if it attempts to move outside the area of the warehouse, and two robots crash with each other if they ever try to occupy the same spot.
Input
the NS-direction.
The second line contains two integers, 1 <= N, M <= 100, denoting the numbers of robots and instructions respectively.
Then follow N lines with two integers, 1 <= Xi <= A, 1 <= Yi <= B and one letter (N, S, E or W), giving the starting position and direction of each robot, in order from 1 through N. No two robots start at the same position.
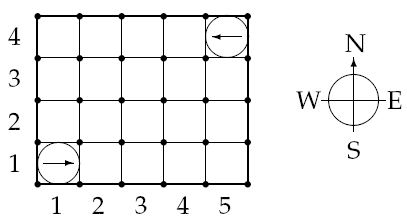
Figure 1: The starting positions of the robots in the sample warehouse
Finally there are M lines, giving the instructions in sequential order.
An instruction has the following format:
< robot #> < action> < repeat>
Where is one of
- L: turn left 90 degrees,
- R: turn right 90 degrees, or
- F: move forward one meter,
and 1 <= < repeat> <= 100 is the number of times the robot should perform this single move.
Output
- Robot i crashes into the wall, if robot i crashes into a wall. (A robot crashes into a wall if Xi = 0, Xi = A + 1, Yi = 0 or Yi = B + 1.)
- Robot i crashes into robot j, if robots i and j crash, and i is the moving robot.
- OK, if no crashing occurs.
Only the first crash is to be reported.
Sample Input
4
5 4
2 2
1 1 E
5 4 W
1 F 7
2 F 7
5 4
2 4
1 1 E
5 4 W
1 F 3
2 F 1
1 L 1
1 F 3
5 4
2 2
1 1 E
5 4 W
1 L 96
1 F 2
5 4
2 3
1 1 E
5 4 W
1 F 4
1 L 1
1 F 20
Sample Output
Robot 1 crashes into the wall
Robot 1 crashes into robot 2
OK
Robot 1 crashes into robot 2
模拟题#include <iostream>
#include <cstring>
#include <cstdio>
#include <cmath>
#include <string>
#include <stack>
#include <queue>
#include <vector>
#include <algorithm>
using namespace std; const int Max=1100000; struct node
{
int dir;
int x;
int y;
} Robot[110]; struct INS
{
int num;
int action;
int repeat;
} Order[110]; bool Map[110][110]; int Dir[4][2]= {{1,0},{0,-1},{-1,0},{0,1}}; int A,B; int n,m; int Handle(int s)
{
if(s=='S'||s=='R')
{
return 1;
}
if(s=='N')
{
return 3;
}
if(s=='E'||s=='F')
{
return 0;
}
if(s=='W')
{
return 2;
}
if(s=='L')
return -1;
return 0;
}
bool Mon()
{
for(int i=0; i<m; i++)
{
if(Order[i].action==1)
{
while(Order[i].repeat--)
{
Robot[Order[i].num].dir++;
if(Robot[Order[i].num].dir==4)
{
Robot[Order[i].num].dir=0;
}
}
}
else if(Order[i].action==-1)
{
while(Order[i].repeat--)
{
Robot[Order[i].num].dir--;
if(Robot[Order[i].num].dir==-1)
{
Robot[Order[i].num].dir=3;
}
}
}
else if(Order[i].action==0)
{
while(Order[i].repeat--)
{
Map[Robot[Order[i].num].x][Robot[Order[i].num].y]=false;
Robot[Order[i].num].x+=Dir[Robot[Order[i].num].dir][0];
Robot[Order[i].num].y+=Dir[Robot[Order[i].num].dir][1];
if(Robot[Order[i].num].x==0||Robot[Order[i].num].x==A+1||Robot[Order[i].num].y==0||Robot[Order[i].num].y==B+1)
{
printf("Robot %d crashes into the wall\n",Order[i].num);
return false;
}
else if(Map[Robot[Order[i].num].x][Robot[Order[i].num].y])
{
for(int j=1; j<=n; j++)
{
if(j!=Order[i].num&&Robot[j].x==Robot[Order[i].num].x&&Robot[j].y==Robot[Order[i].num].y)
{
printf("Robot %d crashes into robot %d\n",Order[i].num,j);
return false;
}
}
}
else
{
Map[Robot[Order[i].num].x][Robot[Order[i].num].y]=true;
}
} }
}
return true;
}
int main()
{
int T;
char s;
scanf("%d",&T);
while(T--)
{
scanf("%d %d",&A,&B);
scanf("%d %d",&n,&m);
memset(Map,false,sizeof(Map));
for(int i=1; i<=n; i++)
{
scanf("%d %d %c",&Robot[i].x,&Robot[i].y,&s);
Map[Robot[i].x][Robot[i].y]=true;
Robot[i].dir=Handle(s);
}
for(int i=0; i<m; i++)
{
scanf("%d %c %d",&Order[i].num,&s,&Order[i].repeat);
Order[i].action=Handle(s);
}
if(Mon())
{
printf("OK\n");
}
}
return 0;
}
版权声明:本文为博主原创文章,未经博主允许不得转载。
Crashing Robots 分类: POJ 2015-06-29 11:44 10人阅读 评论(0) 收藏的更多相关文章
- 百度编辑器UEditor ASP.NET示例Demo 分类: ASP.NET 2015-01-12 11:18 346人阅读 评论(0) 收藏
在百度编辑器示例代码基础上进行了修改,封装成类库,只需简单配置即可使用. 完整demo下载 版权声明:本文为博主原创文章,未经博主允许不得转载.
- Train Problem I 分类: HDU 2015-06-26 11:27 10人阅读 评论(0) 收藏
Train Problem I Time Limit: 2000/1000 MS (Java/Others) Memory Limit: 65536/32768 K (Java/Others) ...
- Least Common Ancestors 分类: ACM TYPE 2014-10-19 11:24 84人阅读 评论(0) 收藏
#include <iostream> #include <cstdio> #include <cstring> #include <cmath> #i ...
- 二分图匹配(KM算法)n^4 分类: ACM TYPE 2014-10-04 11:36 88人阅读 评论(0) 收藏
#include <iostream> #include<cstring> #include<cstdio> #include<cmath> #incl ...
- Segment Tree with Lazy 分类: ACM TYPE 2014-08-29 11:28 134人阅读 评论(0) 收藏
#include<stdio.h> #include<string.h> #include<algorithm> using namespace std; stru ...
- 8大排序算法图文讲解 分类: Brush Mode 2014-08-18 11:49 78人阅读 评论(0) 收藏
排序算法可以分为内部排序和外部排序,内部排序是数据记录在内存中进行排序,而外部排序是因排序的数据很大,一次不能容纳全部的排序记录,在排序过程中需要访问外存. 常见的内部排序算法有:插入排序.希尔排序. ...
- C语言之void类型及void指针 分类: C/C++ 2015-07-13 11:24 8人阅读 评论(0) 收藏
原文网址:http://www.cnblogs.com/pengyingh/articles/2407267.html 1.概述 许多初学者对C/C 语言中的void及void指针类型不甚理解,因此在 ...
- 指向函数的指针 分类: C/C++ 2015-07-13 11:03 14人阅读 评论(0) 收藏
原文网址:http://www.cnblogs.com/zxl2431/archive/2011/03/25/1995285.html 讲的很清楚,备份记录. (一) 用函数指针变量调用函数 可以用指 ...
- iOS调用相机,相册,上传头像 分类: ios技术 2015-04-14 11:23 256人阅读 评论(0) 收藏
一.新建工程 二.拖控件,创建映射 三.在.h中加入delegate @interface ViewController : UIViewController 复制代码 四.实现按钮事件 -(IBAc ...
随机推荐
- j2ee Servlet、Filter、Listener
首先,JSP/Servlet规范中定义了Servlet.Filter.Listener这三种角色,并没有定义Interceptor这个角色,Interceptor是某些MVC框架中的角色,比如Stru ...
- iOS 提交代码出现提示弹出框显示 “A commit message is required to perform this operation.Enter a commit message and try again.“
需要你写一下你确认提交的信息,就是你这次提交上去修改了什么功能,简单描述一下
- Leetcode: Water and Jug Problem && Summary: GCD求法(辗转相除法 or Euclidean algorithm)
You are given two jugs with capacities x and y litres. There is an infinite amount of water supply a ...
- CareerCup: 17.14 minimize unrecognized characters
Oh, no! You have just completed a lengthy document when you have an unfortu- nate Find/Replace misha ...
- Codeforce Round #214 Div2
我是不是快要滚蛋了,这次CF爆0? 居然第一题都过不去了,妈蛋附近有没有神经病医院,我要去看看! 精力憔悴! 第一题,我以为要恰好这么多钱,不能多余,想想这也没必要,不符合逻辑,及自己就是这么傻逼! ...
- Ubuntu 16.04 LTS Final Beta
期待已久的Ubuntu LTS 版本开放了公测版本 Ubuntu 16.04 (Xenial Xerus) Daily Build(http://cdimage.ubuntu.com/daily-l ...
- C++之路进阶——codevs4416(FFF的后宫)
4416 FFF 团卧底的后宫 时间限制: 1 s 空间限制: 128000 KB 题目等级 : 黄金 Gold 题目描述 Description 你在某日收到了 FFF 团卧底的求 ...
- CS2013调试DLL
需要打开两个项目,一个是Win32Project1,由这个项目创建DLL,注意要在DLL函数前加上__declspec(dllexport),这样就会还配套生成一个.lib 然后再打开一个项目,一般为 ...
- 使用 GitHub / GitLab 的 Webhooks 进行网站自动化部署
老早就想写这个话题了,今天正好有机会研究了一下 git 的自动化部署.最终做到的效果就是,每当有新的 commit push 到 master 分支的时候,就自动在测试/生产服务器上进行 git pu ...
- clock divider
一个clock的产生: 1) Clock source的选择: cgm_mux5(.clk_out, .clk_in0, .clk_in1, .clk_in2, .clk_in3, .clk_in4, ...