树莓派CM4(二): UART/IIC/SPI调试
1. 参考资料
- 资料汇总页面
- 《bcm2711-peripherals.pdf》,下载地址
https://datasheets.raspberrypi.com/bcm2711/bcm2711-peripherals.pdf
- 《cm4io-datasheet.pdf》,下载地址
- 《cm4-product-brief.pdf》,下载地址
https://datasheets.raspberrypi.com/cm4/cm4-product-brief.pdf
- 《cm4-datasheet.pdf》,下载地址
2. 串口配置
2.1 概述
- 树莓派
CM4共有六路UART,均由GPIO复用而来 - 一个
mini UART(UART1)用作调试串口 + 五个PL011串口(UART0/2/3/4/5) - 如下图中白框所示,详情见
《bcm2711-peripherals.pdf》的5.3. Alternative Function Assignments章节

2.2 调试串口mini UART
mini UART- 为控制台预留,见《bcm2711-peripherals.pdf》的2.2章节- 需要修改
/boot/config.txt或/boot/firmware/config.txt,在其末尾添加如下内容以启用调试串口enable_uart=1
2.3 其它五路串口
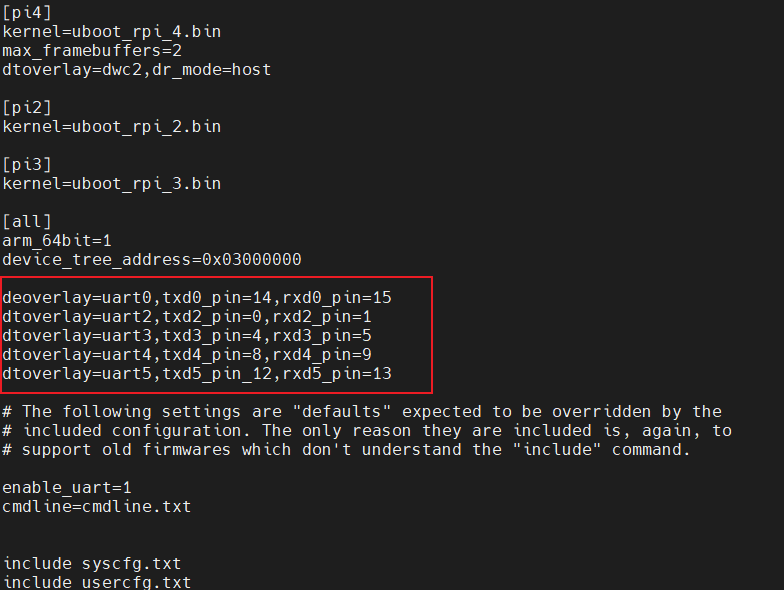
修改
/boot/config.txt,添加如下内容,表示启用UART0/2/3/4/5deoverlay=uart0,txd0_pin=14,rxd0_pin=15
dtoverlay=uart2,txd2_pin=0,rxd2_pin=1
dtoverlay=uart3,txd3_pin=4,rxd3_pin=5
dtoverlay=uart4,txd4_pin=8,rxd4_pin=9
dtoverlay=uart5,txd5_pin_12,rxd5_pin=13
如下图
修改完成后重启生效
2.4 确认所有串口均已启用
查看
dmesg中tty相关的日志,可以看到ttyS0+ttyAMA0 ~ ttyAMA4六路串口均已启用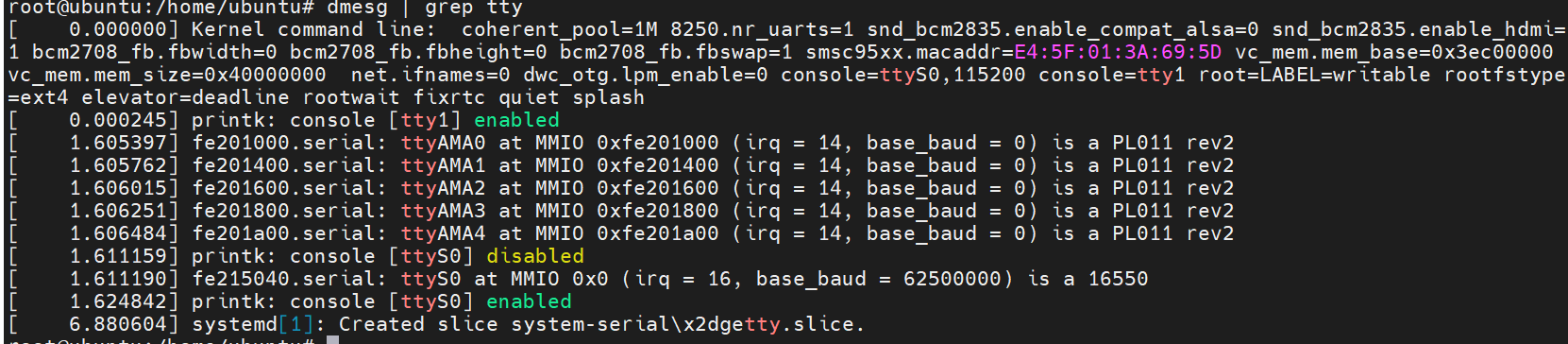
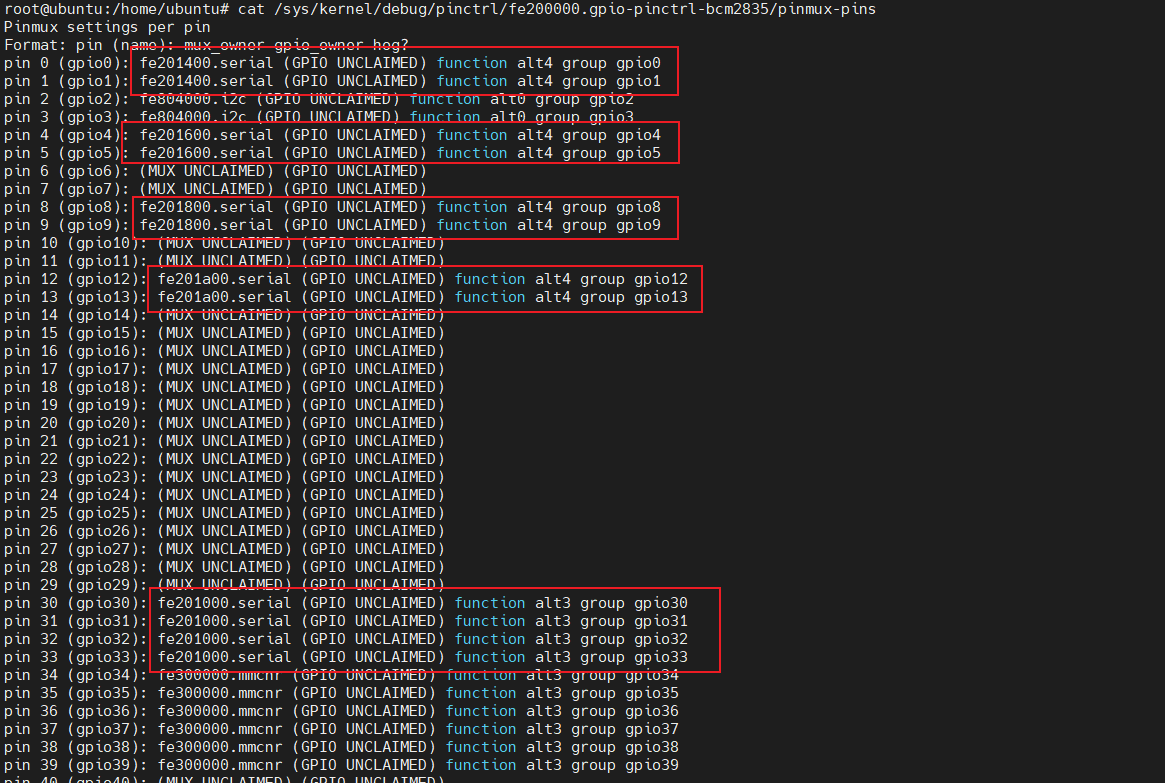
因为这六路串口都是通过GPIO复用而来的,进一步查看GPIO复用关系,如下图
查看
/dev目录下的ttyAMA节点
GPIO对应关系

结合
dmesg中的日志和上面的GPIO复用关系,可以知道/dev/ttyAMA*和uart的对应关系ttyAMA0 对应 UART0
ttyAMA1 对应 UART2,Tx = GPIO0, Rx = GPIO1
ttyAMA2 对应 UART3,Tx = GPIO4, Rx = GPIO5
ttyAMA3 对应 UART4,Tx = GPIO8, Rx = GPIO9
ttyAMA4 对应 UART5,Tx = GPIO12, Rx = GPIO13
2.5 调试串口测试
调试串口
UART1,GPIO14接Rx,GPIO15接Tx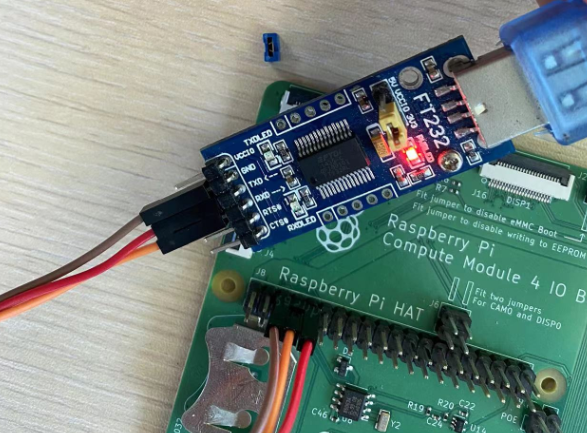
波特率
115200,连接的电脑后就可以通过该串口进入终端
2.6 其它串口测试
以
UART3为例,短接UART3的Tx和Rx引脚,即短接GPIO4和GPIO5如下图中的黑色杜邦线所示
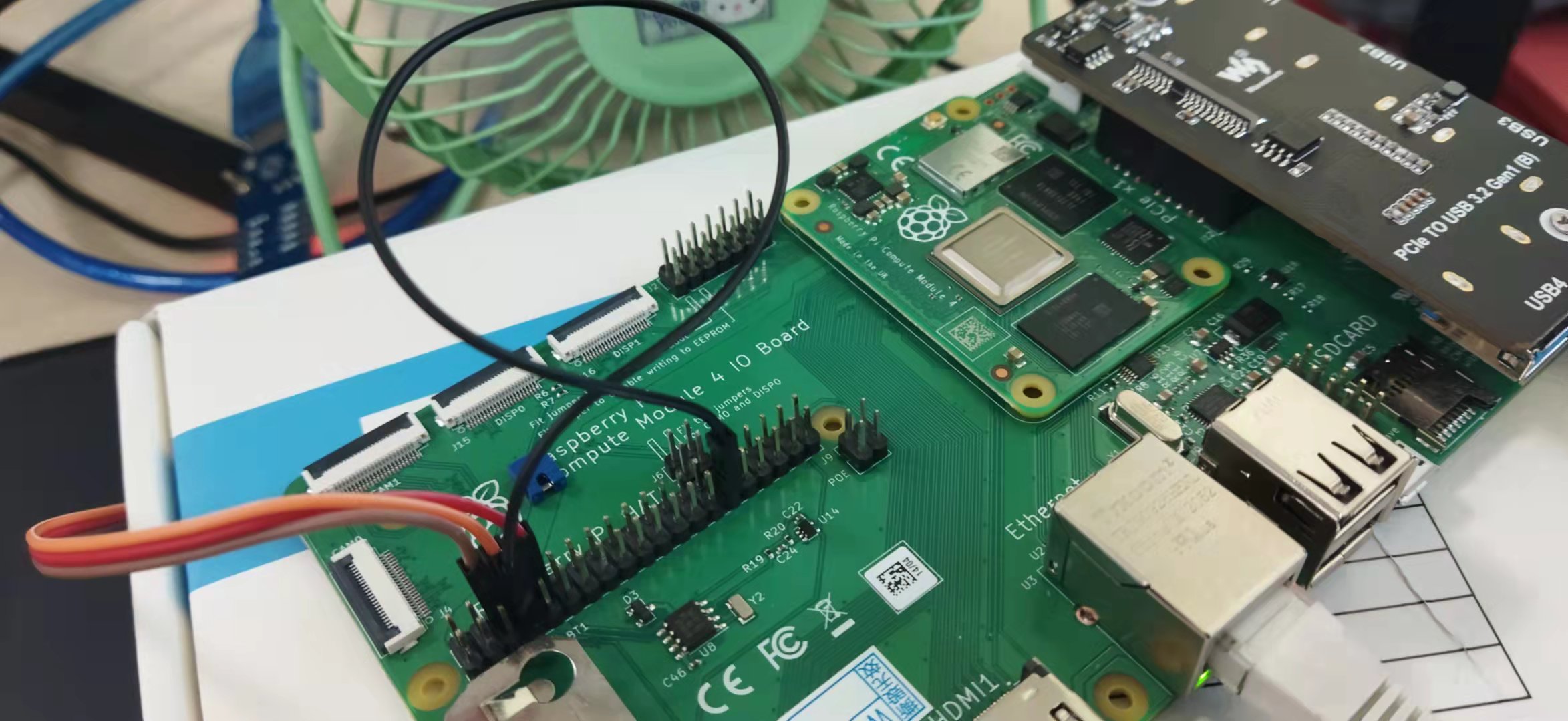
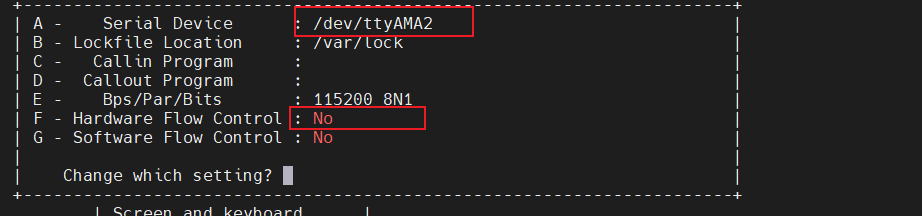
UART3对应/dev/ttyAMA2,使用minicom打开/dev/ttyAMA2节点
打开
minicom的回显功能,CTRL-A Z打开配置菜单,如下,输入E打开回显
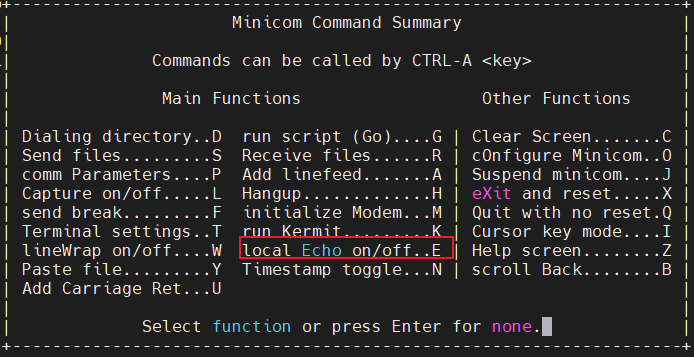
因为我们将UART3的Tx和Rx短接在一起,所以无论输入什么字符,都会看到显示了两次,一次是发送的数据,一次是接收的数据

其它
UART的测试方法同理
3. IIC配置
3.1 参考资料
《bcm2711-peripherals.pdf》的
Chapter 3.BSC章节《cm4io-datasheet.pdf》的
2.9. Fan connector章节《cm4io-datasheet.pdf》的
2.13. Real time clock (RTC)章节《cm4-datasheet.pdf》的
2.9. I2C (SDA0 SCL0)章节《cm4-datasheet.pdf》的
2.5.1. Alternative function assignments章节
3.2 硬件资源
- 树莓派CM4最多可启用5路
i2c - 其中内部的
i2c0使用两个GPIO管脚:SDA0连接在GPIO44上,SCL0连接在GPIO45上; 需要注意的使这两个管脚默认被分配给
CSI1/DIS1使用,只有当CSI1/DSI1未启用时,这两个管脚才能用作通用的i2c接口 CSI/DSI默认是关闭的,使用摄像头和DSI的时候会占用I2C-10/I2C-11/I2C-0三个I2C设备- 关于i2c这一部分有一个疑问:为什么没有
SDA2/SCL2呢?只有SDA0/1/3/4/5/6和SCL0/1/2/3/4/5? - i2c和GPIO的复用关系如下图中绿色框标出来的部分


3.3 启用i2c0
最简单的方法是通过
raspi-config来启用i2c,这种方法已经有不少相关文章了,在此不在赘述,接下来要说的是另一种方式修改
/boot/config.txt或/boot/firmware/config.txt,向其中添加如下内容dtparam=i2c_vc=on
向
/etc/modules中添加i2c-dev$ sudo echo "i2c-dev" >> /etc/modules
$ sudo echo " " >> /etc/modules # 追加一个空行
重启生效
3.4 检查i2c0是否启用成功
- 查看GPIO复用关系表可知,
i2c0的时钟线和数据线由GPIO44/45复用而来 - 查看GPIO复用关系,如下图,可以看到
GPIO44/45被复用为function alt1,正式i2c0的两个管脚sudo cat /sys/kernel/debug/pinctrl/fe200000.gpio-pinctrl-bcm2711/pinmux-pins

3.5 使用i2c-tools进行调试
安装i2c调试工具
i2c-toolssudo apt-get install -y i2c-tools
查看所有的
i2c总线sudo i2cdetect -l

注意:硬件上
i2c0 SDA0/SCL0对应的是这里的i2c-10, 参考《cm4io-datasheet.pdf》的2.9. Fan connector章节我在
i2c0上接了一个数字温度传感器,地址0x49查看
i2c-10上有哪些设备,只需要关注0x49即可$ sudo i2cdetect -y 10
0 1 2 3 4 5 6 7 8 9 a b c d e f
00: -- -- -- -- -- -- -- --
10: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
20: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
30: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
40: -- -- -- -- -- -- -- -- -- 49 -- -- -- -- -- --
50: -- 51 -- -- -- -- -- -- -- -- -- -- -- -- -- --
60: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
70: 70 71 72 73 -- -- -- --尝试读取一下温度,0x29换算一下正好是41℃
$ sudo i2cget -f -y 10 0x49
0x29
4. SPI配置
4.1 参考资料
- 《bcm2711-peripherals.pdf》的
2.3. Universal SPI Master (2x)章节
4.2 硬件资源
- 树莓派CM4最多可启用五路SPI,
SPI0/1/3/4/5/6,问题:和i2c一样,为什么没有SPI2 ? - 另外,虽然从GPIO复用表中能够找到六路SPI的管脚定义,但是有些SPI的管脚是冲突的,最多只能启用五路SPI
4.3 使能SPI
- 在
SPI0上连接一个2 inch的显示屏,分辨率240 * 320,官方资料如下
https://www.waveshare.net/wiki/2inch_LCD_Module#.E4.B8.8A.E5.B1.82.E5.BA.94.E7.94.A8
原理图如下
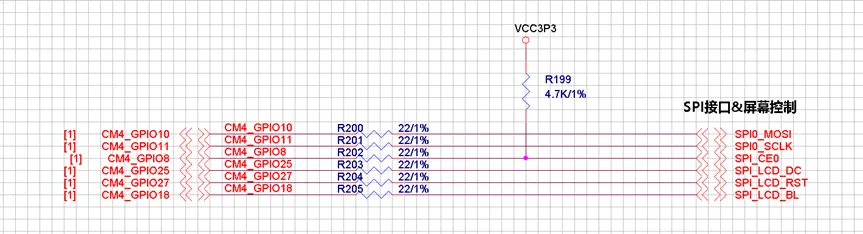
使能SPI,使用
raspi-config可以很方便地开启SPI;这里选择使用另一种方式:修改config.txt的方式来使用SPI修改
/boot/firmware/config.txt,取消#dtparam=spi=on这一行的注释,如果没有相关内容,手动添加之

重启生效,重启后就能够看到SPI对应的设备节点
/dev/spidev0.0和/dev/spidev0.1
4.4 SPI屏幕输出
- 安装
libraspberrypi-dev$ sudo apt-get install libraspberrypi-dev
FBCP移植FBCP (Framebuffer Copy)用于将帧缓冲中的内容复制到一个显示设备上直接在树莓派中进行编译,避免交叉编译
获取源码,安装相关依赖
$ wget https://www.waveshare.net/w/upload/1/18/Waveshare_fbcp.zip
$ unzip Waveshare_fbcp.zip
$ cd Waveshare_fbcp/
$ sudo chmod +x ./shell/*
$ sudo apt-get install -y cmake unzip
修改编译脚本
./shell/waveshare-2inch,修改如下#!/bin/bash # 清空编译输出目录
sudo rm -rf $(dirname "$0")/../build
mkdir $(dirname "$0")/../build
# 进入编译输出目录
cd $(dirname "$0")/../build
# cmake构建Makefile
sudo cmake -DSPI_BUS_CLOCK_DIVISOR=20 -DWAVESHARE_2INCH_LCD=ON -DBACKLIGHT_CONTROL=ON -DSTATISTICS=0 ..
# 开始编译
sudo make -j$(nproc)

开始编译
Waveshare_fbcp$ sudo ./shell/waveshare-2inch
编译得到的
fbcp就是所需的驱动程序

安装fbcp到/usr/local/bin/目录下,注意检查是否有可执行权限
Waveshare_fbcp$ sudo cp ./build/fbcp /usr/local/bin/
在
/etc/rc.local中添加如下内容,实现fbcp开机自启sudo fbcp &
修改
/boot/firmware/config.txt,注释掉DRM VC4 V3D相关内容,添加屏幕信息# 注释以下内容
# Enable DRM VC4 V3D driver
# dtoverlay=vc4-kms-v3d
# max_framebuffers=2 hdmi_force_hotplug=1
max_usb_current=1
hdmi_group=2
hdmi_mode=1
hdmi_mode=87
hdmi_cvt 320 240 60 6 0 0 0
hdmi_drive=2
display_rotate=90 # 我是将屏幕横过来使用的,故需要旋转90°
重启,正常情况下就能够看到屏幕显示了,并且会产生一个新的设备节点
/dev/fb0

4.5 使用FFmpeg在屏幕上播放视频
安装
ffmpeg$ sudo apt-get install -y ffmpeg
由于屏幕的分辨率是
320 * 240,需要将视频转成相应的分辨率后才能完美播放,可以参考下面的命令$ ffmpeg -i input.mp4 -vf "scale=320:-1" output.mp4
播放视频,循环播放;注意:必须要指定使用
/dev/fb0播放$ sudo ffmpeg -re -stream_loop -1 -i /home/jun/output.mp4 -vf "setpts=1.0*PTS" -pix_fmt bgra -f fbdev /dev/fb0
显示效果
写在最后
禁止转载到CSDN !!! 其它随意,转载请注明出处
树莓派CM4(二): UART/IIC/SPI调试的更多相关文章
- 一从二主IIC连接调试
最近有个项目需要实现快速开机出摄像头预览(2s内),但是我的板子linux上的qt应用起来都要10s左右了,于是在硬件上增加了一个屏驱芯片TW8836,这是一个mcu,可以直接获取摄像头数据送到lcd ...
- 采用FPGA实现UART转SPI
应用笔记 V1.1 2015/2/10 采用FPGA实现UART转SPI 概述 本文提供了实现UART转SPI的Verilog代码的功能描述.这份笔记将介绍UART和SPI的基本知识,代码设计 ...
- [原创]树莓派CM4配置GPIO复用为i2c
1.简介 项目中需要控制各种外设的电源,正常应该是通过GPIO进行控制,但是树莓派CM4的GPIO管脚有限,因此需要使用i2c扩展IO 查阅CM4-datesheet发现GPIO22和GPIO23可以 ...
- PX01关于手机屏IIC触摸调试学习笔记
相关文件下载: 上位机工具:http://www.xk-image.com/download/blog/0002_TP调试/LcdTools20210605.rar 调试案例:http://www.x ...
- Uart、SPI和I2C的区别
串口通信:UART.SPI.I2C区别[引用] 1.UART就是两线,一根发送一根接收,可以全双工通信,线数也比较少.数据是异步传输的,对双方的时序要求比较严格,通信速度也不是很快.在多机通信上面 ...
- 调试SQLSERVER (二)使用Windbg调试SQLSERVER的环境设置
调试SQLSERVER (二)使用Windbg调试SQLSERVER的环境设置 调试SQLSERVER (一)生成dump文件的方法调试SQLSERVER (三)使用Windbg调试SQLSERVER ...
- 【转】android 电容屏(二):驱动调试之基本概念篇
关键词:android 电容屏 tp 工作队列 中断 多点触摸协议平台信息:内核:linux2.6/linux3.0系统:android/android4.0 平台:S5PV310(samsung ...
- MIP开发教程(二) 使用MIP-CLI工具调试MIP网页
初始化 MIP 配置 新建一个 MIP 网页 编写 MIP 网页代码 校验 MIP 网页 调试 MIP 网页 1. 初始化 MIP 配置 首先在html目录下进行初始化 MIP 配置: $ mip i ...
- 关于树莓派Pi2通过UART连接攀藤G5传感器的python
1.准备工作:树莓派Pi2板子,攀藤G5传感器 关于树莓派40pin口网上很多,我们只了解与攀藤G5连接的问题 (1)攀藤G5pin1(VCC5v)要注意是5V,有很多板子接的是3V,而树莓派的pin ...
- 通信方案软件设计(环形动态申请内存,支持USART+IIC+SPI+CAN协议
1 <STM32进阶之串口环形缓冲区实现>中讲得比较清楚(链接) 2 amobbs中讲的方法有点复杂,以下是链接和参考源码: 通信方案软件设计(环形动态申请内存,支持USART+IIC+S ...
随机推荐
- IT运维全面数字化|芯片设计行业领跑打造运维流程闭环
在当今数字化转型的浪潮中,科技行业正经历着前所未有的变革.随着5G.人工智能.物联网等新兴技术的快速发展,企业对于高效.智能的运营模式的需求日益迫切. 芯片设计公司作为科技产业链中的关键一环,不仅要在 ...
- Python中multiprocessing.Pool进程池实现守护进程的方法
前言 在multiprocessing.Process中可以使用p.daemon=True将子进程p设置为守护进程. 那么在multiprocessing.Pool进程池中怎么实现这个功能呢? 什么是 ...
- python重拾基础第一天
本节内容 Python介绍 发展史 Python 2 or 3? 安装 Hello World程序 变量 用户输入 模块初识 .pyc是个什么鬼? 数据类型初识 数据运算 表达式if ...else语 ...
- LLM并行训练4-megascale论文学习
算法优化 并行注意力机制 \[串行版本: y = x + MLP(LayerNorm(x + Attention(LayerNorm(x)))) \] \[并行版本: y = x + MLP(Laye ...
- Excel 更改数据同步更新到Mysql数据库
刚上班,领导给我提出一个需求,想要每天更新Mysql数据库中的原有商品订单状态,添加新的商品订单状态.因为公司目前的数据库只能添加数据,不能更改数据,想要更改原有的数据,只能将原有的数据清空,再导入新 ...
- 小组合作实现的基于 jsp,servlet,mysql 编写的学校管理系统
基本完成的页面--源代码在<文件>中可下载 文件地址:https://i.cnblogs.com/Files.aspx 学生管理模块各功能已实现 百度网盘下载地址: 链接:https:// ...
- Node.js - fs.path模块
首先我有话说,是谁说的学完ajax就可以去vue了,太天真了我,学会js钻出来个ajax,学完ajax钻出来个node.js这一步步的,当然node不会学到太深入把表面的认识一下就可以了,这之后可能更 ...
- 【Python】python笔记:时间模块/时间函数
1.Python时间模块 import time import datetime # 一: time模块 ############## # 1.时间戳 print (time.time()) # 16 ...
- The Beauty of Physics
绪言/1 学物理的人用不着对物理方程的意义操心,只要关心物理方程的美就够了. --狄拉克 此曲只应天上有--开普勒的和谐宇宙/11 天体的运动只不过是某种永恒的复调音乐而已,要用才智而不是耳朵来倾听. ...
- 在Winform程序中增加隐藏的按键处理,用于处理一些特殊的界面显示或者系统初始化操作
以前,我看到一个朋友在对一个系统做初始化的时候,通过一组魔幻般的按键,调出来一个隐藏的系统设置界面,这个界面在常规的菜单或者工具栏是看不到的,因为它是一个后台设置的关键界面,不公开,同时避免常规用户的 ...