STM32CubeMX教程8 TIM 通用定时器 - 输出比较
1、准备材料
开发板(STM32F407G-DISC1)
ST-LINK/V2驱动
STM32CubeMX软件(Version 6.10.0)
keil µVision5 IDE(MDK-Arm)
逻辑分析仪nanoDLA
2、实验目标
使用STM32CubeMX软件配置STM32F407通用定时器的输出比较通道,并将其输出到四个LED灯引脚实现LED灯流水灯效果
3、实验流程
3.0、前提知识
STM32F407的定时器通道均可以实现输出比较功能,输出比较功能是利用当前计数值CNT与捕获/比较寄存器CRR的值作比较,如果值相等就会产生输出比较结果,此时也会产生输出比较完成中断或DMA请求
定时器产生的输出比较结果可以输出到比较通道的具体引脚上,也可以直接内部使用不输出到引脚,具体输出的电平由比较模式和输出极性共同决定
输出比较模式有①冻结:保持当前电平、②匹配时输出有效电平、③匹配时输出无效电平、④匹配时翻转输出电平、⑤强制输出有效电平和⑥强制输出无效电平六种模式
有效电平可以手动设置为高/低电平
3.1、CubeMX相关配置
请先阅读“STM32CubeMX教程1 工程建立”实验3.4.1小节配置RCC和SYS
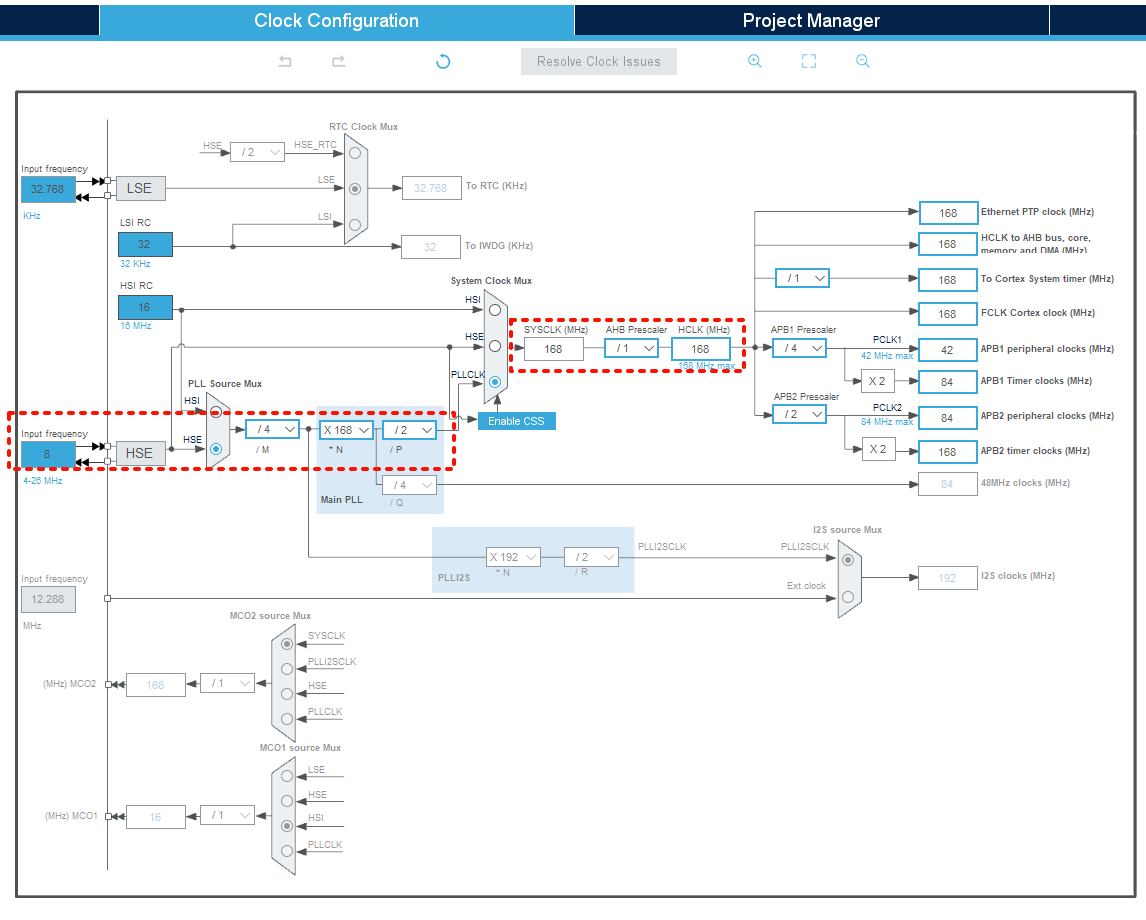
3.1.1、时钟树配置
系统时钟树配置与上一实验一致,均设置为STM32F407总线能达到的最高时钟频率,具体如下图所示
3.1.2、外设参数配置
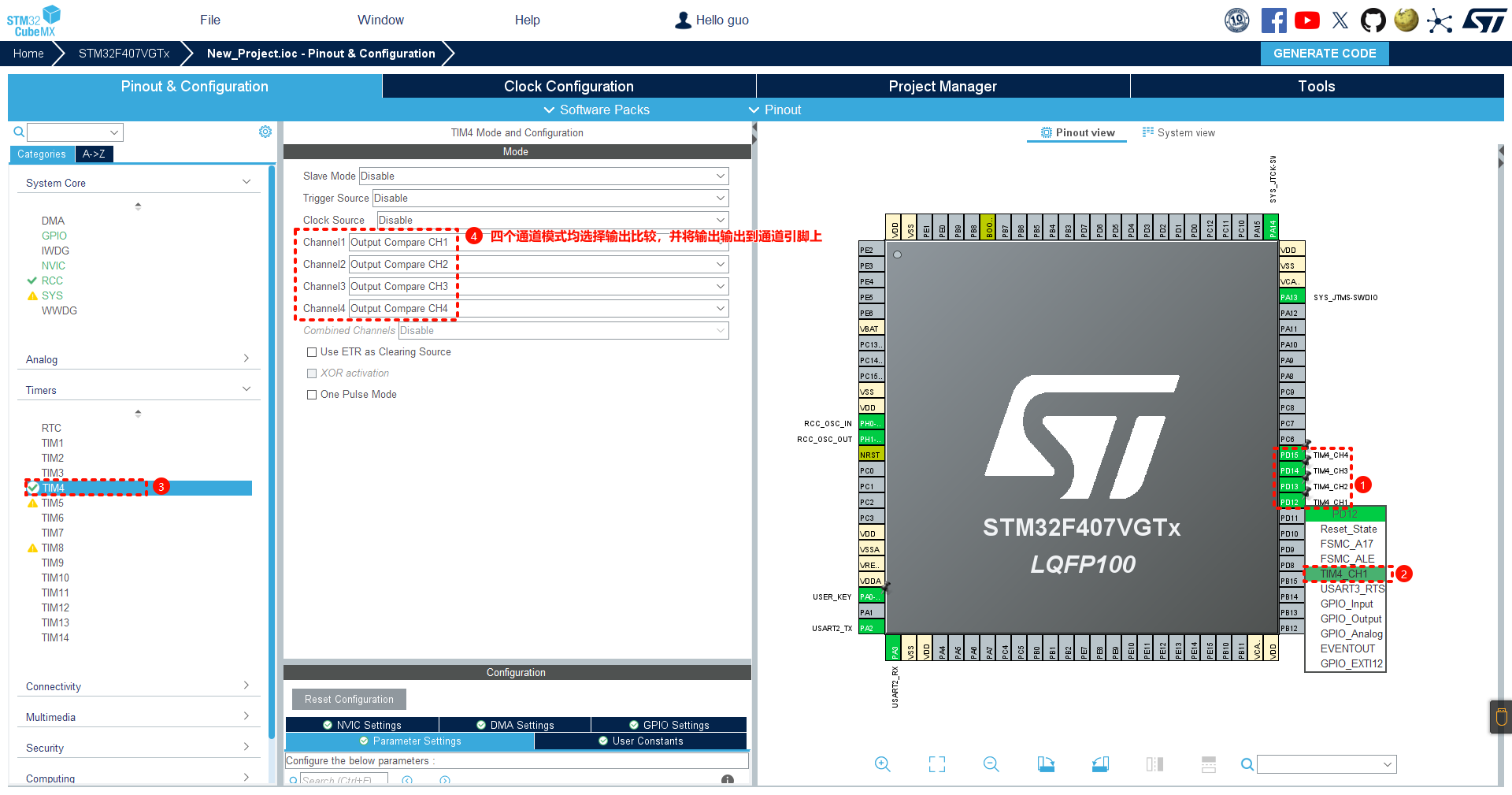
在Pinout & Configuration页面右边芯片引脚预览Pinout view中找到LED灯的四个控制引脚PD12、PD13、PD14和PD15,依次左键单击并配置其功能为TIM4_CHx
然后在页面左侧功能分类栏目中点开Timers栏目,单击栏目下的TIM4,并将其Channel1~4全部配置为Output Compare CHx
具体配置如下图所示
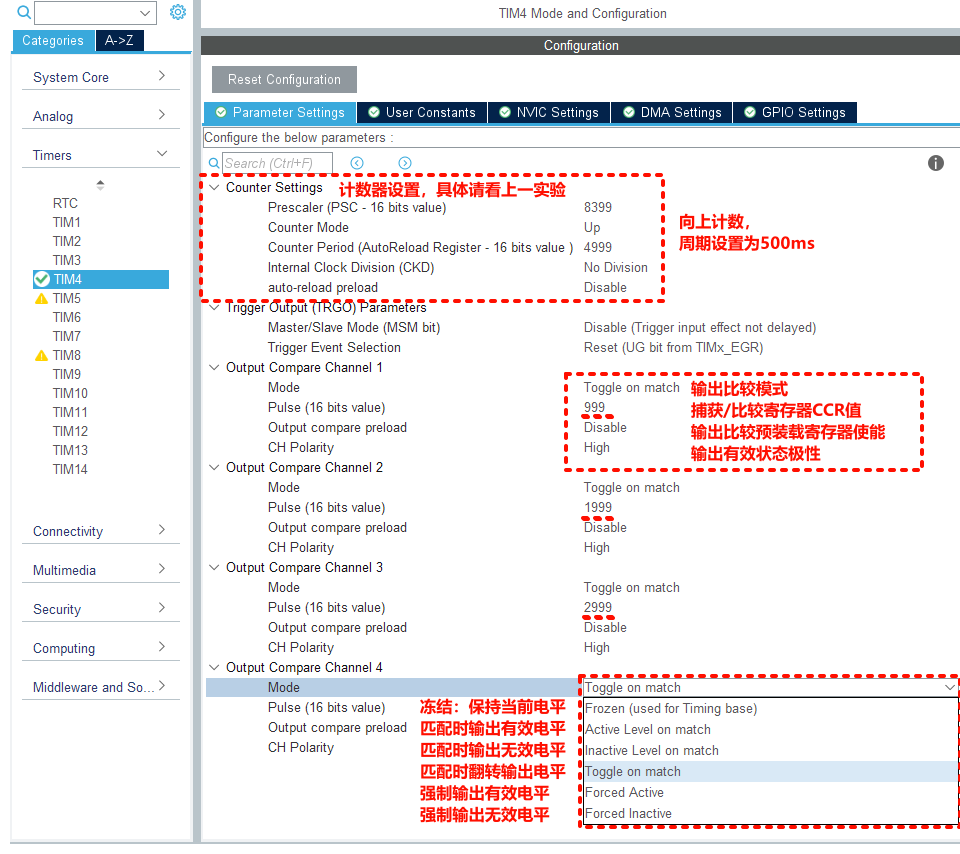
然后对启用的TIM4定时器的四个通道参数进行设置,下面对重要参数介绍
①首先对计数器参数的设置与之前讲解的一致,这里不再赘述,周期设为500ms,不分频不预装载
②四个通道的输出比较模式均选择为了Toggle on match,即当比较寄存器CCR的值和当前定时器计数值CNT匹配时翻转通道引脚输出状态,四个通道从上到下其比较寄存器的值CCR依次为999、1999、2999和3999,这表示在一个时钟500ms周期内,通道1、2、3和4分别在100ms、200ms、300ms和400ms的时候翻转其对应通道引脚的值
③输出比较四个通达均不启用预装载,通道输出有效状态为高电平,其他的模式如其字面意思较为好理解,这里不再过多阐述
具体的参数配置如下图所示
3.1.3、外设中断配置
在Pinout & Configuration页面左边System Core/NVIC中勾选TIM4全局中断,然后选择合适的中断优先级即可

3.2、生成代码
请先阅读“STM32CubeMX教程1 工程建立”实验3.4.3小节配置Project Manager
单击页面右上角GENERATE CODE生成工程
3.2.1、外设初始化函数调用流程
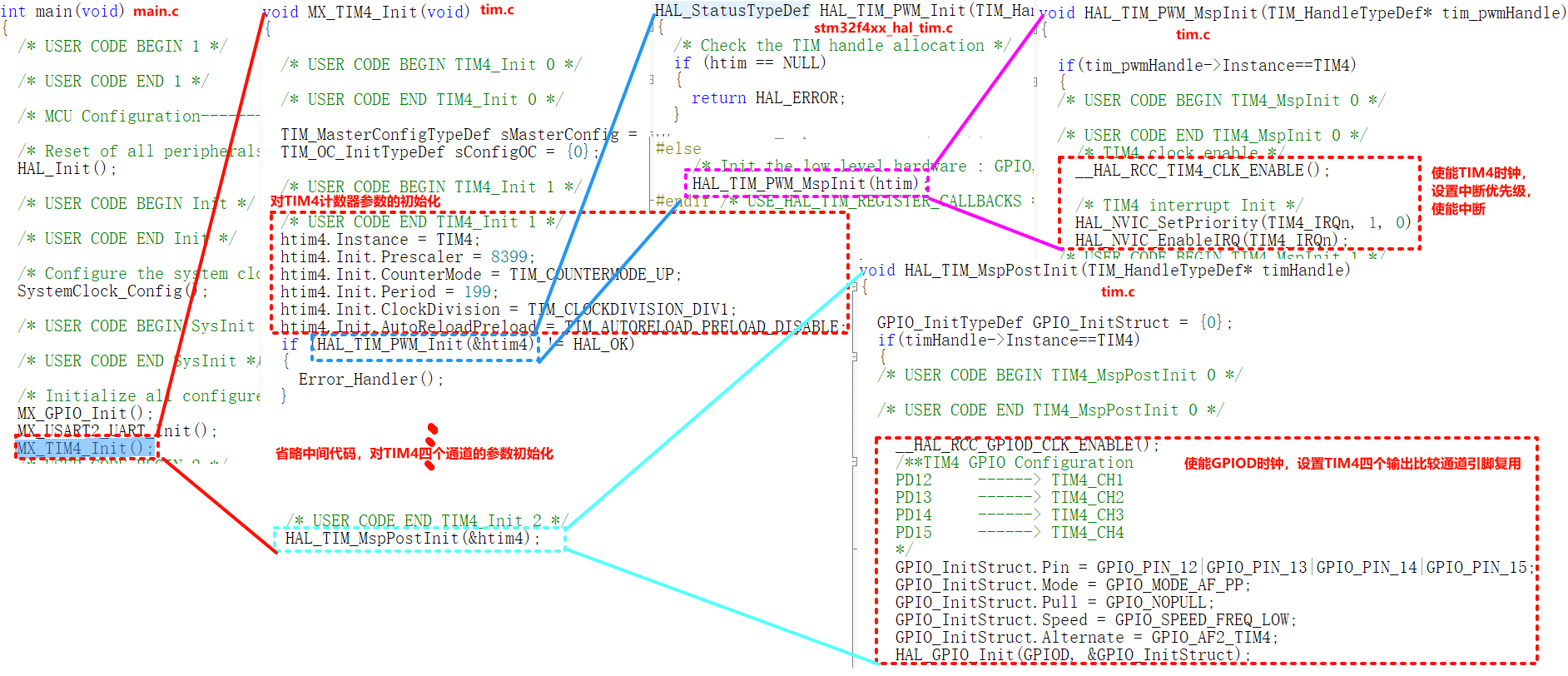
在生成的工程代码主函数main()中调用了MX_TIM4_Init()函数完成了对TIM4基本定时器参数,输出比较通道1/2/3/4参数的配置
然后在HAL_TIM_OC_Init()函数中调用了HAL_TIM_OC_MspInit()函数对TIM4时钟和中断进行了使能,并对中断优先级进行了配置
最后在MX_TIM4_Init()函数末尾调用了HAL_TIM_MspPostInit()函数对TIM4的四个输出比较通道引脚进行了复用设置,从而完成了整个初始化过程
如下图所示为TIM4输出比较初始化的具体函数调用流程
3.2.2、外设中断函数调用流程
再来看看输出比较中断回调函数流程,使能定时器全局中断后在stm32f4xx_it.c中自动生成了TIM4的中断处理函数TIM4_IRQHandler
TIM4_IRQHandler调用了HAL库的定时器中断处理函数HAL_TIM_IRQHandler,这个函数负责处理所有的定时器相关中断
通过判断中断来源及相关寄存器,最终输出比较事件完成的回调函数为HAL_TIM_OC_DelayElapsedCallback(或者是HAL_TIM_PWM_PulseFinishedCallback)(注释1),该函数为虚函数,需要用户重新实现
如下图所示为TIM4输出比较中断回调的具体函数调用流程
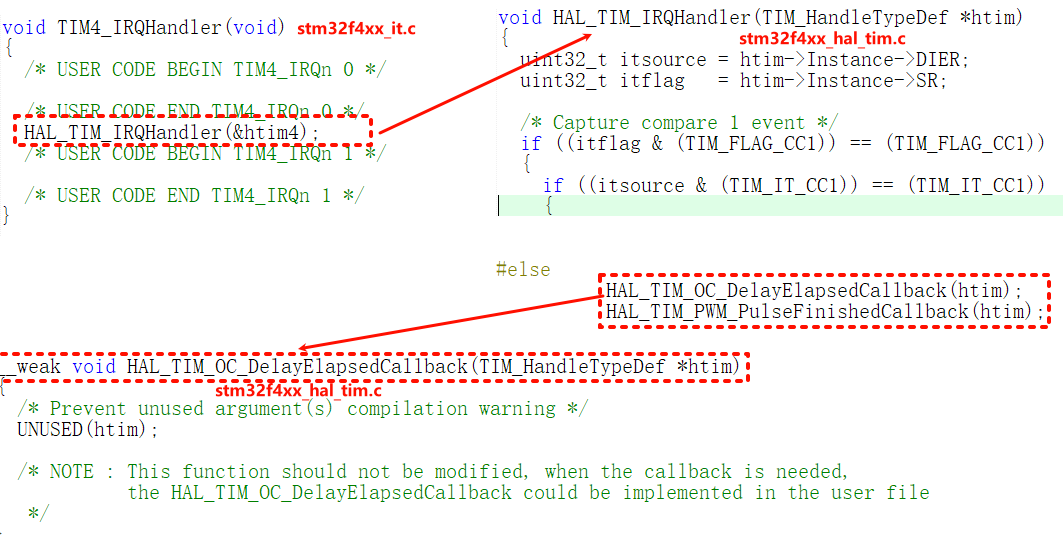
该实验目标不需要动态修改输出比较的参数,因此笔者这里没有重新在tim.c中重新实现该回调函数,需要提醒的是,输出比较事件完成时会同时进入HAL_TIM_OC_DelayElapsedCallback和HAL_TIM_PWM_PulseFinishedCallback两个回调函数中,因此请注意此实验确保注释掉PWM输出实验中HAL_TIM_PWM_PulseFinishedCallback函数体内动态修改占空比的代码,否则将达不到预期效果
3.2.3、添加其他必要代码
最后只需要在主函数中启动定时器(注释2),启动输出比较通道就可以实现本实验目标,启动代码如下图所示
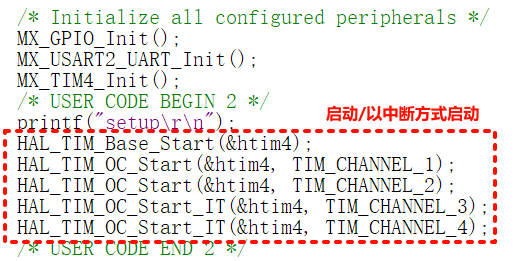
源代码如下
HAL_TIM_Base_Start(&htim4);
HAL_TIM_OC_Start(&htim4, TIM_CHANNEL_1);
HAL_TIM_OC_Start(&htim4, TIM_CHANNEL_2);
HAL_TIM_OC_Start_IT(&htim4, TIM_CHANNEL_3);
HAL_TIM_OC_Start_IT(&htim4, TIM_CHANNEL_4);
4、常用函数
/*启动输出比较通道*/
HAL_StatusTypeDef HAL_TIM_OC_Start(TIM_HandleTypeDef *htim, uint32_t Channel)
/*停止输出比较通道*/
HAL_StatusTypeDef HAL_TIM_OC_Stop(TIM_HandleTypeDef *htim, uint32_t Channel)
/*以中断方式启动输出比较通道*/
HAL_StatusTypeDef HAL_TIM_OC_Start_IT(TIM_HandleTypeDef *htim, uint32_t Channel)
/*停止以中断方式启动的输出比较通道*/
HAL_StatusTypeDef HAL_TIM_OC_Stop_IT(TIM_HandleTypeDef *htim, uint32_t Channel)
/*输出比较通道完成回调函数*/
void HAL_TIM_OC_DelayElapsedCallback(TIM_HandleTypeDef *htim)
5、烧录验证
5.1、具体步骤
“设置TIM4的4个通道为输出比较到通道 -> 配置TIM4基本参数及4个输出比较通道参数 -> NVIC中勾选TIM4全局中断并设置合适中断优先级 -> 在主函数中使用HAL_TIM_Base_Start(&htim4)启动定时器TIM4 -> 然后使用HAL_TIM_OC_Start_IT(&htim4, TIM_CHANNEL_x)函数开启四个通道的输出比较”
5.2、实验现象
烧录程序,上电单片机启动后会发现开发板上的四个LED灯,按照绿、橙、红和蓝的顺序依次点亮,然后不断循环,实际现象如下图所示
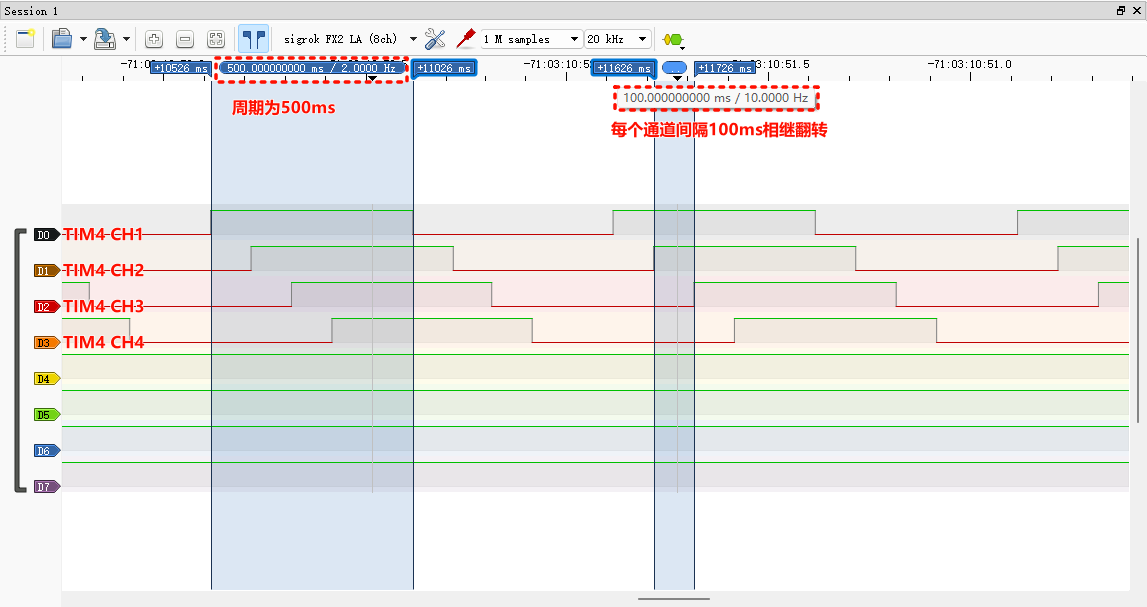
使用逻辑分析仪监测TIM4的四个输出通道引脚,可以看出TIM4的四个通道输出的电平翻转周期均为500ms,并且4个通道间每个通道均间隔100ms相继翻转状态
6、注释详解
注释1:在生成PWM波的实验中提到其使用的中断回调函数HAL_TIM_PWM_PulseFinishedCallback也可以换成输出比较完成的回调函数HAL_TIM_OC_DelayElapsedCallback,因为笔者发现在HAL库的定时器中断处理函数HAL_TIM_IRQHandler中,这两个函数是同时调用的,也就是说调用函数1,函数2也会跟着调用,所以笔者认为两个都可以使用
注释2:笔者发现在启动输出比较/输入捕获/PWM输出时,可以不调用定时器启动函数,执行HAL_TIM_xx_Start/HAL_TIM_xx_Start_IT函数时会自动启动定时器;另外HAL_TIM_OC_Start/HAL_TIM_OC_Start_IT两个输出比较启动函数和HAL_TIM_PWM_Start/HAL_TIM_PWM_Start_IT两个PWM输出启动函数,除了函数名和一些注释外其函数体内的代码一模一样;
更多内容请浏览 OSnotes的CSDN博客
STM32CubeMX教程8 TIM 通用定时器 - 输出比较的更多相关文章
- TIM—高级定时器输出PWM
高级定时器输出PWM 主频144M,生成一个频率为1K,占空比为30%的PWM详细代码参考EVT例程PWM_Output 重要参数说明 TIM_TimeBaseInitStructure.TIM_Pe ...
- 第32章 TIM—高级定时器—零死角玩转STM32-F429系列
第32章 TIM—高级定时器 全套200集视频教程和1000页PDF教程请到秉火论坛下载:www.firebbs.cn 野火视频教程优酷观看网址:http://i.youku.com/fire ...
- STM32通用定时器(转载)
STM32的定时器功能很强大,学习起来也很费劲儿. 其实手册讲的还是挺全面的,只是无奈TIMER的功能太复杂,所以显得手册很难懂,我就是通过这样看手册:while(!SUCCESS){看手册-}才搞明 ...
- (五)转载:通用定时器PWM输出
1. TIMER输出PWM基本概念 脉冲宽度调制(PWM),是英文“Pulse Width Modulation”的缩写,简称脉宽调制,是利用微处理器的数字输出来对模拟电路进行控制的一种非常有 ...
- STM32(7)——通用定时器PWM输出
1.TIMER输出PWM基本概念 脉冲宽度调制(PWM),是英文“Pulse Width Modulation”的缩写,简称脉宽调制,是利用微处理器的数字输出来对模拟电路进行控制的一种 ...
- stm32之通用定时器TIM
STM32系列的CPU,有多达8个定时器: 1.其中TMI1和TIM8是能够产生三对PWM互补输出的高级定时器,常用于三相电机的驱动:它们的时钟有APB2的输出产生: 2.其它6个为普通定时器,时钟由 ...
- 第31章 TIM—基本定时器—零死角玩转STM32-F429系列
第31章 TIM—基本定时器 全套200集视频教程和1000页PDF教程请到秉火论坛下载:www.firebbs.cn 野火视频教程优酷观看网址:http://i.youku.com/fire ...
- 关于STM32CubeMX使用LL库设置PWM输出
HAL和LL库 HAL是ST为了实现代码在ST家族的MCU上的移植性,推出的一个库,称为硬件抽象层,很明显,这样做将会牺牲存储资源,所以项目最后的代码比较冗余,且运行效率大大降低,运行速度受制于fla ...
- STM32 通用定时器的几种配置方式
STM32 通用定时器的几种配置方式 //------------------------------------------------------------------------------ ...
- TIM—基本定时器
本章参考资料:< STM32F4xx 参考手册>.< STM32F4xx 规格书>.库帮助文档< stm32f4xx_dsp_stdperiph_lib_um.chm&g ...
随机推荐
- 洛谷题解 | P1051 谁拿了最多奖学金
目录 题目描述 输入格式 输出格式 输入输出样例 提示 题目思路 AC代码 题目描述 某校的惯例是在每学期的期末考试之后发放奖学金.发放的奖学金共有五种,获取的条件各自不同: 1. 院士奖学金,每人 ...
- 不能显式拦截ajax请求的302响应?
记录工作中早该加深印象的一个小case: ajax请求不能显式拦截 302响应. 我们先来看一个常规的登录case: 浏览器请求资源,服务器发现该请求未携带相关凭据(cookie或者token) 服务 ...
- GPT-4 API waitlist
Skip to main content Site Navigation GPT-4 API waitlist We're making GPT-4 available as an API for d ...
- 【RocketMQ】RocketMQ存储结构设计
CommitLog 生产者向Broker发送的消息,会以顺序写的方式,写入CommitLog文件,CommitLog文件的根目录由配置参数storePathRootDir决定,默认每一个CommitL ...
- 【算法】游戏中的学习,使用c#面向对象特性控制游戏角色移动
最近,小悦的生活像是一首繁忙的交响曲,每天忙得团团转,虽然她的日程安排得满满当当,但她并未感到充实.相反,她很少有时间陪伴家人,这让她感到有些遗憾.在周五的午后,小悦的哥哥突然打来电话,他的声音里充满 ...
- QMainWindow无法显示,使用show()不显示窗口(QT)
当使用 MainWindow w: w.show(); 不显示窗口时 变更为: MainWindow *w=new MainWindow(); w->show();
- 使用JNA读取dll文件
由于项目需要进行读卡操作,需要使用java进行读取dll文件 设备:德卡T10 1. 引入POM文件 <dependency> <groupId>net.java.dev.jn ...
- [学习笔记]TypeScript查缺补漏(二):类型与控制流分析
@ 目录 类型约束 基本类型 联合类型 控制流分析 instanceof和typeof 类型守卫和窄化 typeof判断 instanceof判断 in判断 内建函数,或自定义函数 赋值 布尔运算 保 ...
- Asp.Net Core webapi+net6 使用资源筛选器(过滤器) 做缓存
写一个特性类,用来做标记 [AttributeUsage(AttributeTargets.Method)] //只对方法有效 public class ResourceFilterAttribute ...
- 国产瀚高数据库简单实践 及 authentication method 13 not supported 错误解决方法
近几年IT界软硬件"国产化"搞得很密集,给很多公司带来了商机.但是有些公司拿国外的代码改改换个皮肤,就是"自主知识产权"的国产软件,光明正大卖钱,这个有点... ...