cull/clip distance example
http://www.gamedev.net/topic/578866-d3d10-how-to-increase-maxcount-of-sv_clipdistance/
The D3D#_CLIP_OR_CULL_DISTANCE_* values are #defines in the d3d11.h header file. For distance count the value is 8 and for element count the value is 2. This means you can have any number of clip or cull values provide that their sum is 8 or less and that they must be fit into 2 vec4 registers.
In D3D10+ you have to code the math yourself in the shader to put the vertex through the plane equation and then store the resulting distance value in one of the registers. Values greater than or equal to zero should not be clipped/culled. The values you provide will be interpolated so that each pixel is clipped appropriately.
Here is an example, using just cull distance.
cbuffer ClipPlanes
{
float4 planes[6];
};
struct VS_OUT
{
float4 pos : SV_Position;
float4 clips[2] : SV_CullDistance;
};
VS_OUT vsmain( float4 pos : SV_Position )
{
VS_OUT vsout = (VS_OUT)0;
vsout.pos = pos;
for( uint i = 0; i < planes.Length; ++i )
{
((float[8])vsout.clips)[i] = dot( planes[i].xyz, pos.xyz ) - planes[i].w;
}
return vsout;
}
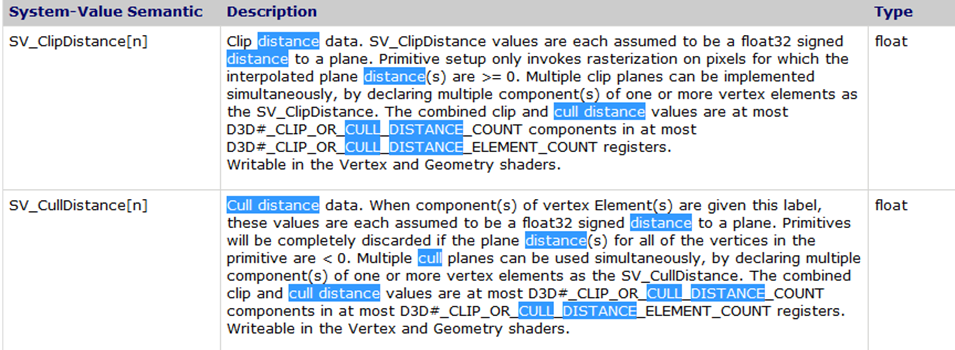
下面D3D文档中对ClipDistance和CullDistance的描述。gpu将会在体元装配阶段进行这些clip和cull操作。
cull/clip distance example的更多相关文章
- A trip through the Graphics Pipeline 2011_10_Geometry Shaders
Welcome back. Last time, we dove into bottom end of the pixel pipeline. This time, we’ll switch ...
- NV 200, 300, 400, 500, 600, 700, 800
NV GF6系列架构分析(GPU gem2 读书笔记) http://www.cnblogs.com/wangdaniu/archive/2006/02/20/334089.html 总线带宽:PCI ...
- ROS学习记录(二)————使用smartcar进行仿真(用.xacro文件来运行rviz)
我发现一个学习ROS系统的好网站: 创客智造http://www.ncnynl.com/ 这里面关于ROS的各个方面都有很详细的介绍. 这周,不,上周我对整个ROS是绝望的,我用一个一个下午的时间在敲 ...
- 引擎设计跟踪(九.14.3) deferred shading 准备
目前做的一些准备工作 1.depth prepass for forward shading. 做depth prepass的原因是为了完善渲染流程, 虽然架构上支持多个pass, 但实际上从来没有测 ...
- Robot Operating System (ROS)学习笔记2---使用smartcar进行仿真
搭建环境:XMWare Ubuntu14.04 ROS(indigo) 转载自古月居 转载连接:http://www.guyuehome.com/248 一.模型完善 文件夹urdf下,创建ga ...
- rviz1
msckf_vio ####查看topic列表:wj@wj-Inspiron-5437:~$ rostopic list/benchmark_publisher/path/cam0/image_raw ...
- rviz2
VINS-Mono ####Panels: 面板: - Class: rviz/Displays 显示1 Help Height: Name: Displays Property Tree Widge ...
- ros下单目相机校正
1. 安装对应的驱动与程序包. 图像对应包 http://wiki.ros.org/camera_calibration 在gitbub下载image_pipeline : ...
- PyQt+moviepy音视频剪辑实战2:一个剪裁视频文件精华内容留存工具的实现
专栏:Python基础教程目录 专栏:使用PyQt开发图形界面Python应用 PyQt+moviepy音视频剪辑实战 专栏:PyQt入门学习 老猿Python博文目录 老猿学5G博文目录 一.引言 ...
随机推荐
- Python3 CNN中卷积和池化的实现--限制为二维输入
# -*- coding: utf-8 -*- """ Created on Wed Jan 31 14:10:03 2018 @author: markli " ...
- 【Ray Tracing in One Weekend 超详解】 光线追踪1-9 景深
今天我们来学最后一章 Chapter11:Defocus Blur Preface 散焦模糊 也称 景深 首先,我们来了解一下散焦模糊,我们在真实相机中散焦模糊的原因是因为它们需要一个大圈(而不仅仅是 ...
- 关于XML解析中的CDATA的简单介绍
所有 XML 文档中的文本均会被解析器解析. 只有 CDATA 区段(CDATA section)中的文本会被解析器忽略. PCDATA PCDATA 指的是被解析的字符数据(Parsed Chara ...
- 使用GenericServlet实例
使用GenericServlet实例 package com.kettas.servlet; import javax.servlet.* ; import java.io.* ; public cl ...
- ARP欺骗防御工具arpon
ARP欺骗防御工具arpon ARP欺骗是局域网最为常见的中人间攻击实施方式.Kali Linux提供一款专用防御工具arpon.该工具提供三种防御方式,如静态ARP防御SARPI.动态ARP防御 ...
- JZYZOJ 2043 多项式除法和取余 NTT 多项式
http://172.20.6.3/Problem_Show.asp?id=2043 最开始用了FFT,交上去全tle和wa了(tle的比较多),测了一组数据发现求逆元的过程爆double了(毕竟系数 ...
- Intel Code Challenge Elimination Round (Div.1 + Div.2, combined) A. Broken Clock 水题
A. Broken Clock 题目连接: http://codeforces.com/contest/722/problem/A Description You are given a broken ...
- LPC43xx Asymmetric Dual Core : Cortex-M0 and Cortex-M4
- Jquery DataTable基本使用
1,首先需要引用下面两个文件 <link rel="stylesheet" href="https://cdn.datatables.net/1.10.16/css ...
- git 自动转换行符的坑爹案例
本人写的脚本都是在unix上运行的,但是编写有时候喜欢使用Git拉去到windows的ide进行编写,毕竟我的unix只有命令行的没有ide, 殊不知有一天我的sh执行时出现错误 -bash: ./d ...