cull/clip distance example
http://www.gamedev.net/topic/578866-d3d10-how-to-increase-maxcount-of-sv_clipdistance/
The D3D#_CLIP_OR_CULL_DISTANCE_* values are #defines in the d3d11.h header file. For distance count the value is 8 and for element count the value is 2. This means you can have any number of clip or cull values provide that their sum is 8 or less and that they must be fit into 2 vec4 registers.
In D3D10+ you have to code the math yourself in the shader to put the vertex through the plane equation and then store the resulting distance value in one of the registers. Values greater than or equal to zero should not be clipped/culled. The values you provide will be interpolated so that each pixel is clipped appropriately.
Here is an example, using just cull distance.
cbuffer ClipPlanes
{
float4 planes[6];
};
struct VS_OUT
{
float4 pos : SV_Position;
float4 clips[2] : SV_CullDistance;
};
VS_OUT vsmain( float4 pos : SV_Position )
{
VS_OUT vsout = (VS_OUT)0;
vsout.pos = pos;
for( uint i = 0; i < planes.Length; ++i )
{
((float[8])vsout.clips)[i] = dot( planes[i].xyz, pos.xyz ) - planes[i].w;
}
return vsout;
}
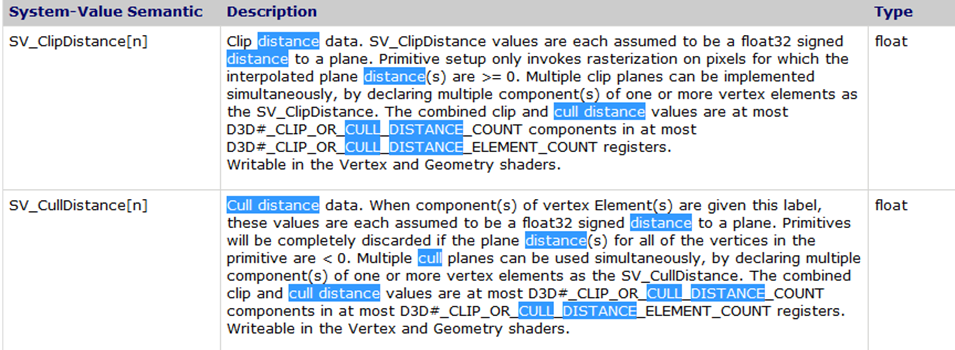
下面D3D文档中对ClipDistance和CullDistance的描述。gpu将会在体元装配阶段进行这些clip和cull操作。
cull/clip distance example的更多相关文章
- A trip through the Graphics Pipeline 2011_10_Geometry Shaders
Welcome back. Last time, we dove into bottom end of the pixel pipeline. This time, we’ll switch ...
- NV 200, 300, 400, 500, 600, 700, 800
NV GF6系列架构分析(GPU gem2 读书笔记) http://www.cnblogs.com/wangdaniu/archive/2006/02/20/334089.html 总线带宽:PCI ...
- ROS学习记录(二)————使用smartcar进行仿真(用.xacro文件来运行rviz)
我发现一个学习ROS系统的好网站: 创客智造http://www.ncnynl.com/ 这里面关于ROS的各个方面都有很详细的介绍. 这周,不,上周我对整个ROS是绝望的,我用一个一个下午的时间在敲 ...
- 引擎设计跟踪(九.14.3) deferred shading 准备
目前做的一些准备工作 1.depth prepass for forward shading. 做depth prepass的原因是为了完善渲染流程, 虽然架构上支持多个pass, 但实际上从来没有测 ...
- Robot Operating System (ROS)学习笔记2---使用smartcar进行仿真
搭建环境:XMWare Ubuntu14.04 ROS(indigo) 转载自古月居 转载连接:http://www.guyuehome.com/248 一.模型完善 文件夹urdf下,创建ga ...
- rviz1
msckf_vio ####查看topic列表:wj@wj-Inspiron-5437:~$ rostopic list/benchmark_publisher/path/cam0/image_raw ...
- rviz2
VINS-Mono ####Panels: 面板: - Class: rviz/Displays 显示1 Help Height: Name: Displays Property Tree Widge ...
- ros下单目相机校正
1. 安装对应的驱动与程序包. 图像对应包 http://wiki.ros.org/camera_calibration 在gitbub下载image_pipeline : ...
- PyQt+moviepy音视频剪辑实战2:一个剪裁视频文件精华内容留存工具的实现
专栏:Python基础教程目录 专栏:使用PyQt开发图形界面Python应用 PyQt+moviepy音视频剪辑实战 专栏:PyQt入门学习 老猿Python博文目录 老猿学5G博文目录 一.引言 ...
随机推荐
- iOS 11开发教程(十六)iOS11应用视图之删除空白视图
iOS 11开发教程(十六)iOS11应用视图之删除空白视图 当开发者不再需要主视图的某一视图时,可以将该视图删除.实现此功能需要使用到removeFromSuperview()方法,其语法形式如下: ...
- Ubuntu 安装Chrome
apt方式安装Chrome 1.添加密匙 wget -q -O - https://dl.google.com/linux/linux_signing_key.pub | sudo apt-key a ...
- HDU 4757 Tree 可持久化字典树 trie
http://acm.hdu.edu.cn/showproblem.php?pid=4757 给出一棵树,每个节点有权值,每次查询节点 (u,v) 以及 val,问 u 到 v 路径上的某个节点与 v ...
- LPC43xx Asymmetric Dual Core : Cortex-M0 and Cortex-M4
- CRM上线之路 走上了CRM实施顾问-第12天上班 -第三周
今天是周五,<CRM初期需求说明>是经理们商讨的,总共2张纸,根据两次会议,我写了<CRM需求说明>总共18面. 这是这周的工作汇报,其实,报告是我一天内写出来的,中午饭都没吃 ...
- mac 刻录ISO系统盘
今天本本系统坏了,手头上又没有U盘PE工具,只有MAC和光驱,只好在MAC上下载系统ISO刻录,我是直接点ISO文件,右键刻录到光盘,刻录好之后放到本本上发现不能引导,再把光盘放回MAC上一看,光盘里 ...
- 基于设备树的TQ2440触摸屏驱动移植
平台 开发板:tq2440 内核:Linux-4.9 u-boot:u-boot-2015.04 概述 之前移植了LCD驱动,下面继续移植触摸屏驱动,然后将tslib也移植上去. 正文 一.移植触 ...
- uifont 字体详解
时间2013-06-04 11:26:33 CSDN博客原文 http://blog.csdn.net/u010013695/article/details/9020611 我们在开发中很多时候要设 ...
- android多设备界面适配的利器:属性weight的妙用
1.按比例显示控件元素 <EditText android:id="@+id/edit_message" android:layout_weight="2" ...
- Oracle 专用模式(DEDICATED) 和 共享模式(SHARE)
Oracle 是一门博大精深的技术.玩了2年的oracle,依旧还有很多知识点不清楚. 昨天群里的朋友提到了 DEDICATED 和 SHARE 两种模式. 不清楚,默默的做点功课了.从网上搜了点知识 ...