TensorFlow实现自编码器及多层感知机
1 自动编码机简介
传统机器学习任务在很大程度上依赖于好的特征工程,比如对数值型,日期时间型,种类型等特征的提取。特征工程往往是非常耗时耗力的,在图像,语音和视频中提取到有效的特征就更难了,工程师必须在这些领域有非常深入的理解,并且使用专业算法提取这些数据的特征。
深度学习则可以解决人工难以提取有效特征的问题,它可以大大缓解机器学习模型对特征工程的依赖。深度学习在早起甚至被认为是一种无监督的特征学习,模仿了人脑的对特征逐层抽象提取的过程。这其中有两点比较重要:一是无监督学习,即我们不需要标注数据就可以对数据进行一定程度的学习,这种学习是对数据内容的组织形式的学习,提取出频繁出现的特征;二是逐层抽象,特征是需要不断抽象的,就像人总是从简单基础的概念开始学习,再到复杂的概念。学生们要从加减乘除开始学起,再到简单函数,然后到微积分,深度学习也一样,它从简单的微观的特征开始,不断抽象特征的层级,逐渐往复杂的宏观特征转变。
特征是可以不断抽象转为高一级的特征的,那我们如何找到这些基本结构然后抽象呢?如果我们有很多标注数据,则可以训练一个深层的神经网络。如果没有标注的数据呢?在这种情况下,我们可以使用无监督的自编码器来提取特征。自编码器(AutoEncoder),使用自身的高阶特征编码自己。自编码器其实也是一种神经网络,它的输入和输出是一致的,它借助稀疏编码的思想,目标是使用稀疏的一些高阶特征重新组合来重构自己。因此,它的特点很明显:第一,期望输入/输出一致;第二,希望使用高阶特征来重复自己,而不是复制原像素点。,所以我们对自编码器加入了集中限制:
(1)如果限制中间隐藏层节点的数量,比如让中间隐藏层节点的数量小于输入/输出节点的数量,就相当于是一个降维的过程。此时已经不可能出现复制所有节点的情况,只能学习数据中最重要的特征复原,将可能不太相关的内容去除。
(2)如果给数据加入噪声,那么就是Denoising AutoEncoder(去噪自编码器),我们将从噪声中学习出数据的特征。同样的我们也不可能完全复制节点,完全复制并不能去除我们添加的噪声,无法完全复原数据。所以唯有学习数据频繁出现的模式和结构,将无规律的噪声略去,才可以复原数据。
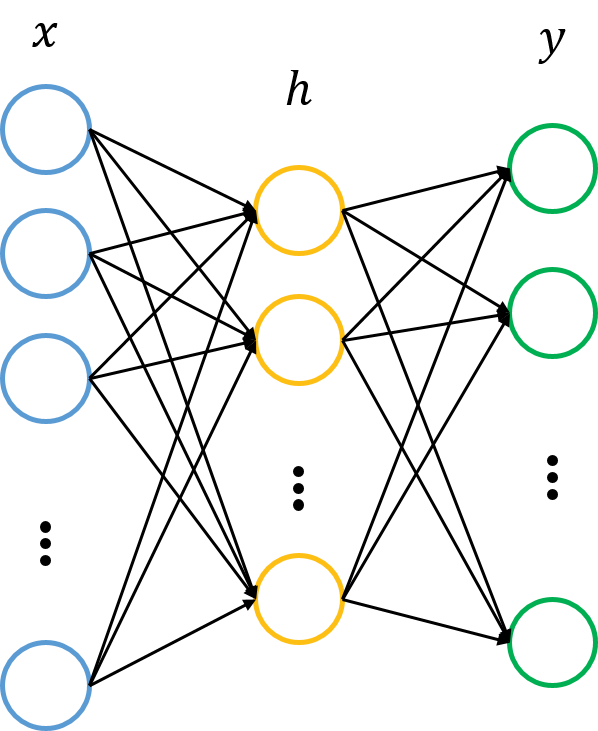
自编码器图示
2 实现一个自编码器
import os
os.environ['TF_CPP_MIN_LOG_LEVEL']='2'
import numpy as np
import sklearn.preprocessing as prep
import tensorflow as tf
from tensorflow.examples.tutorials.mnist import input_data
def xavier_init(fan_in,fan_out,constant=1):#根据某一层网络的输入/输出节点数量自动调整最合适的分布
low = -constant*np.sqrt(6.0/(fan_in+fan_out))
high = -constant*np.sqrt(6.0/(fan_in+fan_out))
return tf.random_uniform((fan_in,fan_out),minval=low,maxval=high,dtype=tf.float32)
class AdditiveGaussianNoiseAutoencoder(object):#去噪自编码器的定义
def __init__(self,n_input,n_hidden,transfer_function=tf.nn.softplus,optimizer=tf.train.AdamOptimizer(),scale=0.1):
self.n_input=n_input
self.n_hidden=n_hidden
self.transfer=transfer_function
self.scale=tf.placeholder(tf.float32)
self.training_scale=scale
network_weights=self.initialize_weights()
self.weights=network_weights
self.x=tf.placeholder(tf.float32,[None,self.n_input])#输入层
self.hidden = self.transfer(tf.add(tf.matmul(self.x+scale*tf.random_normal((n_input,)),self.weights['w1']),self.weights['b1']))#隐藏层
self.reconstruction = tf.add(tf.matmul(self.hidden,self.weights['w2']),self.weights['b2'])#重建层
self.cost = 0.5*tf.reduce_sum(tf.pow(tf.subtract(self.reconstruction,self.x),2.0))#损失函数
self.optimizer = optimizer.minimize(self.cost)#最优化损失函数
init = tf.global_variables_initializer()
self.sess = tf.Session()
self.sess.run(init)
def initialize_weights(self):#初始化参数
all_weights = dict()
all_weights['w1'] = tf.Variable(xavier_init(self.n_input,self.n_hidden))
all_weights['b1'] = tf.Variable(tf.zeros([self.n_hidden],dtype=tf.float32))
all_weights['w2'] = tf.Variable(tf.zeros([self.n_hidden,self.n_input],dtype=tf.float32))
all_weights['b2'] = tf.Variable(tf.zeros([self.n_input],dtype=tf.float32))
return all_weights
def partial_fit(self,X):#训练+损失值计算
cost,opt=self.sess.run((self.cost,self.optimizer),feed_dict={self.x:X,self.scale:self.training_scale})
return cost
def calc_total_cost(self,X):#只计算损失值
return self.sess.run(self.cost,feed_dict={self.x:X,self.scale:self.training_scale})
def transform(self,X):#隐藏层
return self.sess.run(self.hidden,feed_dict={self.x:X,self.scale:self.training_scale})
def reconstruct(self,X):#重构层
return self.sess.run(self.reconstruction,feed_dict={self.x:X,self.scale:self.training_scale})
def getWeights(self):#参数的获取
return self.sess.run(self.weights['w1'])
def getBiases(self):
return self.sess.run(self.weights['b1'])
def standard_scale(X_train,X_test):
preprocessor = prep.StandardScaler().fit(X_train)
X_train = preprocessor.transform(X_train)
X_test = preprocessor.transform(X_test)
return X_train,X_test
def get_random_block_from_data(data,batch_size):
start_index = np.random.randint(0,len(data)-batch_size)
return data[start_index:(start_index+batch_size)]
if __name__=='__main__':
mnist = input_data.read_data_sets("MNIST_data",one_hot=True)
X_train,X_test = standard_scale(mnist.train.images,mnist.test.images)
n_samples = int(mnist.train.num_examples)
training_epochs = 20
batch_size = 128
display_step = 1
autoencoder = AdditiveGaussianNoiseAutoencoder(n_input=784,n_hidden=200,transfer_function=tf.nn.softplus,optimizer=tf.train.AdamOptimizer(learning_rate=0.001),scale=0.01)
for epoch in range(training_epochs):
avg_cost=0
total_batch = int(n_samples/batch_size)
for i in range(total_batch):
batch_xs = get_random_block_from_data(X_train,batch_size)
cost = autoencoder.partial_fit(batch_xs)
avg_cost += cost/n_samples * batch_size
if epoch%display_step==0:
print("Epoch:",'%04d' % (epoch+1), "cost=","{:.9f}".format(avg_cost))
print ("Total cost:"+str(autoencoder.calc_total_cost(X_test)))
3 多层感知机简介
在之前我们使用tensorflow实现了一个简单的Softmax Regression模型,这个线性模型虽然好用但是拟合能力不强,可以算作是多分类问题的逻辑回归,它和传统神经网络的最大区别是没有隐含层。隐含层是神经网络中的一个重要概念,它 是指除了输入/输出外的那些层。
过拟合是机器学习的一个常见问题,它是指模型准确率在训练集上升高,但是在测试集上下降,这通常意味着泛化性能不好,模型只记忆了当前数据的特征,不具备推广能力。为了解决这一问题,Hinton提出了一个简单有效的方法,Dropout,使用复杂的卷积神经网络尤其有效,它的大致思路是在训练时,将神经网络某一层的节点随机丢弃一部分。这种做法实际上等于创造了更多的训练数据,通过增大样本量,减少特征数量来防止过拟合。
参数调试是机器学习的另一大痛点,尤其是SGD的参数,对SGD设置不同的学习速率,最后得到的结果可能差异巨大。对SGD,一开始我们希望学习速率大一些,可以加速收敛,但是在训练后期又希望学习速率小一些,这样可以稳定的落在局部最优解上。不同的机器学习算法所需要的学习速率也不太好设置,需要反复调试,因此像Adagrad,Adam,Adadelta等自适应的方法可以减轻调试参数的负担。
梯度弥散是另一个影响深层神经网络训练的问题,在ReLU激活函数出现之前,神经网络训练都是使用sigmoid作为激活函数。这可能是因为sigmoid函数具有限制性,输出结果在0~1,符合概率的定义。当神经网络的层数较多时,sigmoid函数在反向传播中梯度值会逐渐变小,经过多层传输后悔呈指数级减少,因此梯度在传到前面几层是就变得很小,这种情况下神经网络的参数更新将会很慢。知道ReLu的出现才解决了这个问题,ReLU是一个简单的非线性函数y=max(0,x),非常类似于人脑的阈值响应机制。信号在超过某个阈值是,神经元才进入兴奋状态,平时则处于抑制状态。
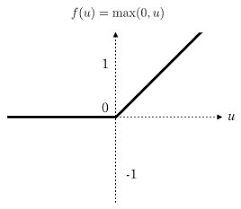
ReLU激活函数
TensorFlow实现自编码器及多层感知机的更多相关文章
- 『TensorFlow』读书笔记_多层感知机
多层感知机 输入->线性变换->Relu激活->线性变换->Softmax分类 多层感知机将mnist的结果提升到了98%左右的水平 知识点 过拟合:采用dropout解决,本 ...
- tensorflow学习笔记——自编码器及多层感知器
1,自编码器简介 传统机器学习任务很大程度上依赖于好的特征工程,比如对数值型,日期时间型,种类型等特征的提取.特征工程往往是非常耗时耗力的,在图像,语音和视频中提取到有效的特征就更难了,工程师必须在这 ...
- TensorFlow学习笔记7-深度前馈网络(多层感知机)
深度前馈网络(前馈神经网络,多层感知机) 神经网络基本概念 前馈神经网络在模型输出和模型本身之间没有反馈连接;前馈神经网络包含反馈连接时,称为循环神经网络. 前馈神经网络用有向无环图表示. 设三个函数 ...
- Tensorflow 2.0 深度学习实战 —— 详细介绍损失函数、优化器、激活函数、多层感知机的实现原理
前言 AI 人工智能包含了机器学习与深度学习,在前几篇文章曾经介绍过机器学习的基础知识,包括了监督学习和无监督学习,有兴趣的朋友可以阅读< Python 机器学习实战 >.而深度学习开始只 ...
- TensorFlow多层感知机函数逼近过程详解
http://c.biancheng.net/view/1924.html Hornik 等人的工作(http://www.cs.cmu.edu/~bhiksha/courses/deeplearni ...
- TensorFlow从0到1之TensorFlow多层感知机函数逼近过程(23)
Hornik 等人的工作(http://www.cs.cmu.edu/~bhiksha/courses/deeplearning/Fall.2016/notes/Sonia_Hornik.pdf)证明 ...
- TensorFlow实现多层感知机函数逼近
TensorFlow实现多层感知机函数逼近 准备工作 对于函数逼近,这里的损失函数是 MSE.输入应该归一化,隐藏层是 ReLU,输出层最好是 Sigmoid. 下面是如何使用 MLP 进行函数逼近的 ...
- TensorFlow实现多层感知机MINIST分类
TensorFlow实现多层感知机MINIST分类 TensorFlow 支持自动求导,可以使用 TensorFlow 优化器来计算和使用梯度.使用梯度自动更新用变量定义的张量.本文将使用 Tenso ...
- 学习笔记TF026:多层感知机
隐含层,指除输入.输出层外,的中间层.输入.输出层对外可见.隐含层对外不可见.理论上,只要隐含层节点足够多,只有一个隐含层,神经网络可以拟合任意函数.隐含层越多,越容易拟合复杂函数.拟合复杂函数,所需 ...
随机推荐
- osg编译日志-release
1>------ 已启动生成: 项目: ZERO_CHECK, 配置: Release x64 ------1> Checking Build System1> CMake does ...
- ROS学习笔记(三)
机器人建模与仿真URDF(Unified Robot Descrption Format,统一机器人描述格式),ROS提供了URDF的c++解析器.安装语法检查工具sudo apt-get insta ...
- Asp.Net Core 2.2 - HTTP Error 500.0 - ANCM In-Process Handler Load Failure
检查发布文件下是否存在runtime这个文件夹,如图
- Java socket详解
参考 https://www.jianshu.com/p/cde27461c226 刚给大家讲解Java socket通信后,好多童鞋私信我,有好多地方不理解,看不明白.特抽时间整理一下,详细讲述Ja ...
- 报错:org.apache.sqoop.common.SqoopException Message: CLIENT_0001:Server has returned exception NoClassDefFoundError: org/codehaus/jackson/map/JsonMappingException
报错背景: CDH集成sqoop2服务之后,创建好link和job之后,执行job的时候报错. 报错现象: sqoop:> start job -j Exception has occurred ...
- POJ Corn Fields 状态压缩DP基础题
题目链接:http://poj.org/problem?id=3254 题目大意(名称什么的可能不一样,不过表达的意思还是一样的): 种玉米 王小二从小学一年级到现在每次考试都是班级倒数第一名,他的爸 ...
- 【原生JS插件】LoadingBar页面顶部加载进度条
先展示一下已经实现的效果: 预览地址:http://dtdxrk.github.io/js-plug/LoadingBar/index.html 看到手机上的浏览器内置了页面的加载进度条,想用在pc上 ...
- shell脚本双引号、大括号、if语句注意事项
1.双引号的问题 变量用双引号括起来的意义 如果变量不用双引号括起来,比如echo $a,那么隐含的意义就是,把$a变量的字符串,按照空格.制表符.换行符等符号来分割开.然后把这些分割后的每一项再按 ...
- Python常见的异常
Python中常见的异常如表所示. exception的更多用法: 1.通常else 语句只有在没有异常的情况下才会被执行 try: aa = "异常测试:" print(aa)e ...
- Django: ORM查询中使用or查询
先引入Q,(原名就叫Q) from django.db.models import Q page_user = User.objects.filter(Q(member_code__contains= ...