Vision-Based Positioning for Internet-of-Vehicles
Vision-Based Positioning for Internet-of-Vehicles
Introduction
Ego-positioning aims at locating an object in a global coordinate system based on its sensor inputs. With the growth of mobile or wearable devices, accurate positioning has be- come increasingly important. Unlike indoor positioning, considerably less efforts have been put into developing high-accuracy ego-positioning systems for outdoor environments. Global Positioning System (GPS) is the most widely used technology implemented in vehicles. However, the precision of GPS sensors is approximately 3 to 20 meters, which is not sufficient for distinguishing the traffic lanes and highway lane levels critical for intelligent vehicles. In addition, the existing GPS systems do not work properly in urban areas where signals are obstructed by high rise buildings. Although several positioning methods based on expensive sensors, such as radar sensors and Velodyne 3D laser scanners, can achieve high accuracy, they are not widely adopted because of cost issues. Hence, it is important to develop accurate ready-to-deploy IoV approaches for outdoor environments.
We presents an algorithm for ego-positioning by using a low-cost monocular camera for systems based on the Internet-of-Vehicles (IoV). To reduce the computational and memory requirements, as well as the communication load, we tackle the model compression task as a weighted k-cover problem for better preserving the critical structures. For real-world vision-based positioning applications, we consider the issue of large scene changes and introduce a model update algorithm to address this problem. A large positioning dataset containing data collected for more than a month, 106 sessions, and 14,275 images is constructed. Extensive experimental results show that sub- meter accuracy can be achieved by the proposed ego-positioning algorithm, which outperforms existing vision-based approaches.
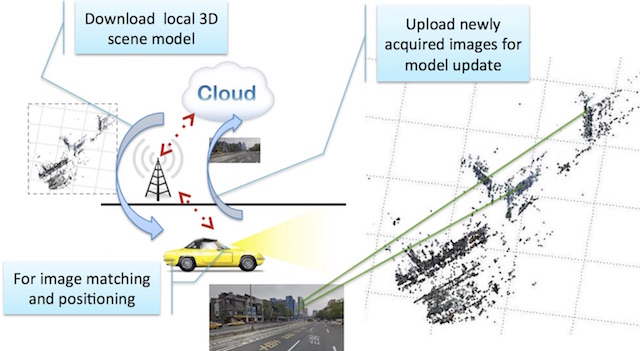
Overview of the algorithm
(a) training phase: images from passing vehicles are uploaded to a cloud server for model construction and compression;

(b) ego-positioning phase: SIFT features from images acquired on vehicles are matched against 3D models previously constructed for ego-positioning. In addition, the newly acquired images are used to update 3D models.
Result
Video on Youtube:http://www.youtube.com/embed/ZLjHGcqhbYA
Dataset
http://www.clarenceliang.com/dataset
Related Publications
[1] Kuan-Wen Chen, Chun-Hsin Wang, Xiao Wei, Qiao Liang, Ming-Hsuan Yang, Chu-Song Chen, and Yi-Ping Hung, “Vision-Based Positioning for Internet-of-Vehicles,” IEEE Transactions on Intelligent Transportation Systems, 2017.
[2] Kuan-Wen Chen, Chun-Hsin Wang, Xiao Wei, Qiao Liang, Ming-Hsuan Yang, Chu-Song Chen, and Yi-Ping Hung, “Vision-Based Positioning with Sub-meter Accuracy for Internet-of-Vehicles,” the 28th IPPR Conference on Computer Vision, Graphics, and Image Processing, Aug., 2015. (Best Paper Award)
Vision-Based Positioning for Internet-of-Vehicles的更多相关文章
- VIPS: a VIsion based Page Segmentation Algorithm
VIPS: a VIsion based Page Segmentation Algorithm VIPS: a VIsion based Page Segmentation Algorithm In ...
- Computer English Notes
Chapter 1 : About Computer Answer the following - Abbreviation LBS - Location-Based Services HTML - ...
- REST is not the Best for Micro-Services GRPC and Docker makes a compelling case
原文:https://hackernoon.com/rest-in-peace-grpc-for-micro-service-and-grpc-for-the-web-a-how-to-908cc05 ...
- 【AR实验室】ARToolKit之概述篇
0x00 - 前言 我从去年就开始对AR(Augmented Reality)技术比较关注,但是去年AR行业一直处于偶尔发声的状态,丝毫没有其"异姓同名"的兄弟VR(Virtual ...
- Socket网络编程一
1.Socket参数介绍 A network socket is an endpoint of a connection across a computer network. Today, most ...
- Python之路,Day8 - Python基础 面向对象高级进阶与socket基础
类的成员 类的成员可以分为三大类:字段.方法和属性 注:所有成员中,只有普通字段的内容保存对象中,即:根据此类创建了多少对象,在内存中就有多少个普通字段.而其他的成员,则都是保存在类中,即:无论对象的 ...
- Python之路第一课Day8--随堂笔记(socket 承接上节---网络编程)
本节内容 Socket介绍 Socket参数介绍 基本Socket实例 Socket实现多连接处理 通过Socket实现简单SSH 通过Socket实现文件传送 作业:开发一个支持多用户在线的FTP程 ...
- python走起之第八话
1. Socket介绍 概念 A network socket is an endpoint of a connection across a computer network. Today, mos ...
- Python学习路程day8
Socket语法及相关 socket概念 A network socket is an endpoint of a connection across a computer network. Toda ...
- 大规模视觉识别挑战赛ILSVRC2015各团队结果和方法 Large Scale Visual Recognition Challenge 2015
Large Scale Visual Recognition Challenge 2015 (ILSVRC2015) Legend: Yellow background = winner in thi ...
随机推荐
- 015-GenericEncodingFilter模板【解决全局乱码】
package ${enclosing_package}; import java.io.IOException; import java.io.UnsupportedEncodingExceptio ...
- 读书笔记-NIO的工作方式
读书笔记-NIO的工作方式 1.BIO是阻塞IO,一旦阻塞线程将失去对CPU的使用权,当前的网络IO有一些解决办法:1)一个客户端对应一个处理线程:2)采用线程池.但也会出问题. 2.NIO的关键类C ...
- TerraBuilder创建地形之去除影像黑边,填充影像
最近在Skyline项目中使用TerraBuilder创建地形,由于地形比较大,分块下载卫星影像,然后再TerraBuilder中合并,由于合并.图形等等问题,导致创建处理出来的地形中存在严重的缝隙和 ...
- Linux IO
Linux 系统编程(IO) 工具 strace: 根据系统调用 od -tcx: 查看二进制 函数参数 使用const修改的指针为传入参数 不使用const的指针为传出参数 string操作的函数 ...
- jQuery 文本插入和标签移动方法
<!DOCTYPE html> <html lang="en"> <head> <meta charset="UTF-8&quo ...
- Python之装饰器、迭代器和生成器
在学习python的时候,三大“名器”对没有其他语言编程经验的人来说,应该算是一个小难点,本次博客就博主自己对装饰器.迭代器和生成器理解进行解释. 为什么要使用装饰器 什么是装饰器?“装饰”从字面意思 ...
- 【Linux】time+dd测试硬盘读写速度
dd 是 Linux/UNIX 下的一个非常有用的命令,作用是用指定大小的块拷贝一个文件,并在拷贝的同时进行指定的转换. dd 命令通用语法格式如下: dd if=path/to/input_file ...
- C#字符串替换_无视大小写
C#里的string.Replace是不能无视大小写的. 首先想到的是正则表达式,在网上查了下,果然有用正则表达式配合一些逻辑运算,实现无视大小写的字符串替换方法.但是正则表达式的方法用起来很麻烦,实 ...
- 2017年11月4日 vs类和结构的区别&哈希表&队列集合&栈集合&函数
类和结构的区别 类: 类是引用类型在堆上分配,类的实例进行赋值只是复制了引用,都指向同一段实际对象分配的内存 类有构造和析构函数 类可以继承和被继承 结构: 结构是值类型在栈上分配(虽然栈的访问速度比 ...
- 数据库mysql中编码自动生成
call PrGetRuleCodeNoDate('Table_Name'); call PrGetRuleCode('Table_Name');