线段拟合(带拉格朗日乘子,HGL)
线段特征上的扫描点满足 (1)。本文的线段特征定义为:L: [dL, φL, PLs, PLe]T,如图1所示。其中,dL为笛卡尔坐标系中原点(激光传感器所在位置)到线段的距离, φL为线段特征的倾角,PLs为线段特征起点,PLe为线段特征终点。线段特征在笛卡尔坐标系下方程为:
 (1)
(1)
其中,dL > 0,-π < φL < π,xi = ρicosφi,yi = ρisinφi。
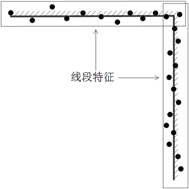
图1 线段
前几节中,通过统计学方法划分出若干区域,为了准确提取线段特征,采用带约束的最小二乘法对每个划分区域特征进行特征提取,将(1)式转换为如下形式:
 (2)
(2)
式中 S、E——线段端点。
将上式改写为矩阵形式有:
 (3)
(3)
其中 ,
,  ,
,  ,
,  。由于α2+β2=1,引入拉格朗日乘子λ,得:
。由于α2+β2=1,引入拉格朗日乘子λ,得:
 (4)
(4)
其中, ,满足JTCJ=1。令
,满足JTCJ=1。令 ,得:
,得:
 (5)
(5)
解上式的广义特征值与广义特征向量,S为一个正定矩阵,待求特征向量J一定对应最小的特征值λ。当α与β确定以后,可以求得:
 (6)
(6)
然后,求出线段特征dL。最后,转换到全局坐标系下。
文献[1]给出了一种误差传播方法,通过最小化隐含的关系方程F(I,O),给出最终误差(I输入误差,O输出误差)。将误差扩展到协方差矩阵,可以通过输入的协方差矩阵ΣI,得到输出的协方差矩阵ΣL。则有:
 (7)
(7)
其中, 。
。 ,
, 令:
令:
 (8)
(8)
代入最后计算出ΣL。
[1] Haralick R M. Propagating covariance in computer vision[M]. Performance Characterization in Computer Vision. Springer Netherlands, 2000: 95-114.
线段拟合(带拉格朗日乘子,HGL)的更多相关文章
- 关于拉格朗日乘子法和KKT条件
解密SVM系列(一):关于拉格朗日乘子法和KKT条件 标签: svm算法支持向量机 2015-08-17 18:53 1214人阅读 评论(0) 收藏 举报 分类: 模式识别&机器学习(42 ...
- 装载:关于拉格朗日乘子法与KKT条件
作者:@wzyer 拉格朗日乘子法无疑是最优化理论中最重要的一个方法.但是现在网上并没有很好的完整介绍整个方法的文章.我这里尝试详细介绍一下这方面的有关问题,插入自己的一些理解,希望能够对大家有帮助. ...
- 约束优化方法之拉格朗日乘子法与KKT条件
引言 本篇文章将详解带有约束条件的最优化问题,约束条件分为等式约束与不等式约束,对于等式约束的优化问题,可以直接应用拉格朗日乘子法去求取最优值:对于含有不等式约束的优化问题,可以转化为在满足 KKT ...
- 机器学习笔记——拉格朗日乘子法和KKT条件
拉格朗日乘子法是一种寻找多元函数在一组约束下的极值方法,通过引入拉格朗日乘子,可将有m个变量和n个约束条件的最优化问题转化为具有m+n个变量的无约束优化问题.在介绍拉格朗日乘子法之前,先简要的介绍一些 ...
- 真正理解拉格朗日乘子法和 KKT 条件
这篇博文中直观上讲解了拉格朗日乘子法和 KKT 条件,对偶问题等内容. 首先从无约束的优化问题讲起,一般就是要使一个表达式取到最小值: \[min \quad f(x)\] 如 ...
- 关于拉格朗日乘子法与KKT条件
关于拉格朗日乘子法与KKT条件 关于拉格朗日乘子法与KKT条件 目录 拉格朗日乘子法的数学基础 共轭函数 拉格朗日函数 拉格朗日对偶函数 目标函数最优值的下界 拉格朗日对偶函数与共轭函数的联系 拉 ...
- 拉格朗日乘子法 - KKT条件 - 对偶问题
接下来准备写支持向量机,然而支持向量机和其他算法相比牵涉较多的数学知识,其中首当其冲的就是标题中的拉格朗日乘子法.KKT条件和对偶问题,所以本篇先作个铺垫. 大部分机器学习算法最后都可归结为最优化问题 ...
- 支持向量机(SVM)必备概念(凸集和凸函数,凸优化问题,软间隔,核函数,拉格朗日乘子法,对偶问题,slater条件、KKT条件)
SVM目前被认为是最好的现成的分类器,SVM整个原理的推导过程也很是复杂啊,其中涉及到很多概念,如:凸集和凸函数,凸优化问题,软间隔,核函数,拉格朗日乘子法,对偶问题,slater条件.KKT条件还有 ...
- 机器学习——支持向量机(SVM)之拉格朗日乘子法,KKT条件以及简化版SMO算法分析
SVM有很多实现,现在只关注其中最流行的一种实现,即序列最小优化(Sequential Minimal Optimization,SMO)算法,然后介绍如何使用一种核函数(kernel)的方式将SVM ...
随机推荐
- 抓包来看ftp状态码
1.quit退出 客户端输入退出命令: 退出的抓包数据交换过程: 2.用户登录,输入正确用户名和错误用户名都是返回331请求输入密码,这里不再将错误用户名的抓包数据交换过程截图. 数据交换过程: 服务 ...
- 解决IE9 IE8的跨域 请求问题
/// <summary> /// 根据url获取对应的HTML /// </summary> /// <param name="url">&l ...
- python读取excel表格生成sql语句 第一版
由于单位设计数据库表·,都用sql.不知道什么原因不用 powerdesign或者ermaster工具,建表很痛苦 作为程序猿当然要想办法解决,用Python写一个程序解决 需要用到 xlrd li ...
- 怎么理解impala(impala工作原理是什么)
下面给大家介绍怎么理解impala,impala工作原理是什么. Impala是hadoop上交互式MPP SQL引擎, 也是目前性能最好的开源SQL-on-hadoop方案. 如下图所示, impa ...
- React.js 小书 Lesson11 - 配置组件的 props
作者:胡子大哈 原文链接:http://huziketang.com/books/react/lesson11 转载请注明出处,保留原文链接和作者信息. 组件是相互独立.可复用的单元,一个组件可能在不 ...
- 【Elasticsearch】深入Elasticsearch集群
7.1 节点发现启动Elasticsearch的时候,该节点会寻找有相同集群名字且课件的主节点,如果有加入,没有自己成为主节点,负责发现的模块两个目的 选出主节点以及发现集群的新节点7.1.1发现的类 ...
- flutter initializing gradle终极解决方案
自己开发的公众号,可以领取淘宝内部优惠券 修改flutter.gradle文件 这种做法网上一大堆的教程,如果你还没改过建议先试下,比如这篇 Flutter 运行 一直Initializing gra ...
- java基础--提示对话框的使用
java基础--提示对话框的使用 2019-03-17-00:35:50-----云林原创 一.显示信息对话框:使用“JOptionPane.showMessageDialog”显示: 图标 对话 ...
- Java线程入门第一篇
Java线程的状态有6种 1. 初始(NEW):新创建了一个线程对象,但还没有调用start()方法. 2. 运行(RUNNABLE):Java线程中将就绪(ready)和运行中(running) ...
- WinSock WSAEventSelect 模型
在前面我们说了WSAAsyncSelect 模型,它相比于select模型来说提供了这样一种机制:当发生对应的IO通知时会立即通知操作系统,并调用对应的处理函数,它解决了调用send和 recv的时机 ...