强化学习:使用自动控制方法PID来解决强化学习问题中的cartpole问题(小车平衡杆问题)
网上找到的一个实现:
地址:
https://gist.github.com/HenryJia/23db12d61546054aa43f8dc587d9dc2c
稍微修改后的代码:
import numpy as np
import gym
def sigmoid(x):
return 1.0 / (1.0 + np.exp(-x))
env = gym.make('CartPole-v1')
desired_state = np.array([0, 0, 0, 0])
desired_mask = np.array([0, 0, 1, 0])
P, I, D = 0.1, 0.01, 0.5 ###
N_episodes = 10
N_steps = 50000
for i_episode in range(N_episodes):
state, _ = env.reset()
integral = 0
derivative = 0
prev_error = 0
for t in range(N_steps):
# print(f"step: {t}")
env.render()
error = state - desired_state
integral += error
derivative = error - prev_error
prev_error = error
pid = np.dot(P * error + I * integral + D * derivative, desired_mask)
action = sigmoid(pid)
action = np.round(action).astype(np.int32)
# print(P * error + I * integral + D * derivative, pid, action)
# print(state, action, )
state, reward, done, info, _ = env.step(action)
if done or t==N_steps-1:
print("Episode finished after {} timesteps".format(t+1))
break
env.close()
运行效果:
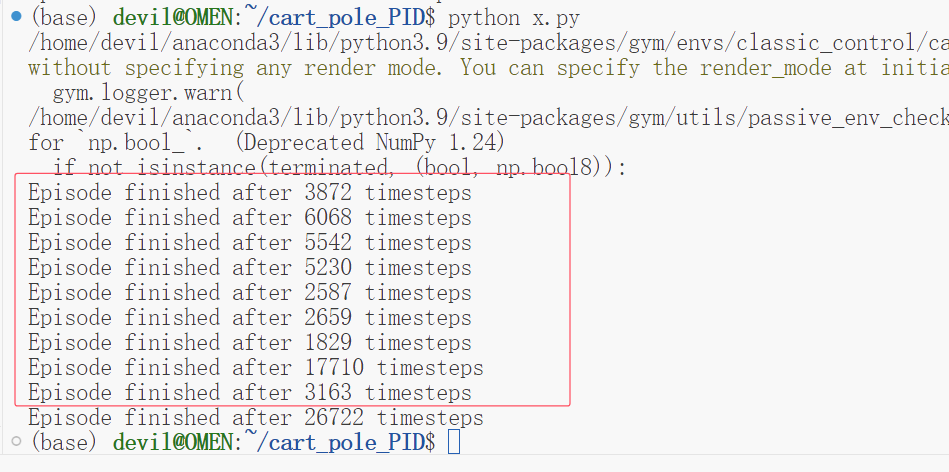
这个表现是极为神奇的,如果不考虑泛化性的话,不考虑使用AI算法和机器学习算法的话,那么不使用强化学习和遗传算法以外的算法,那么使用自动化的算法或许也是不错的选择,并且从这个表现来看这个效果远比使用AI类的算法表现好。
上面的这个代码只考虑小车平衡杆的角度与0的偏差,就可以获得如此高的表现。
根据原地址的讨论:
https://gist.github.com/HenryJia/23db12d61546054aa43f8dc587d9dc2c
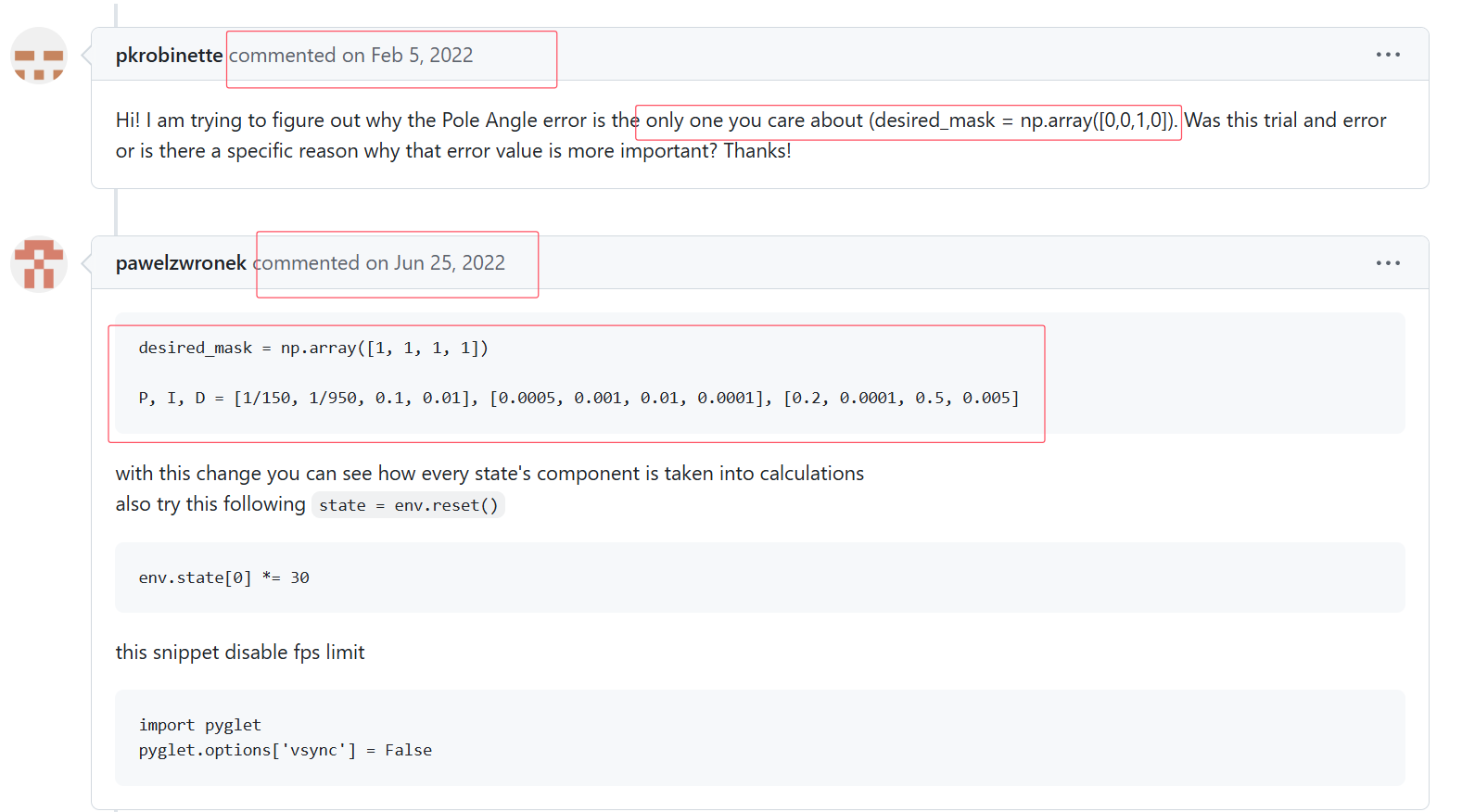
我们可以知道,如果通过调整PID算法的系数,那么可以获得更为优秀的性能表现,为此我们修改代码如下:
点击查看代码
import numpy as np
import gym
def sigmoid(x):
return 1.0 / (1.0 + np.exp(-x))
env = gym.make('CartPole-v1')
desired_state = np.array([0, 0, 0, 0])
# desired_mask = np.array([0, 0, 1, 0])
desired_mask = np.array([1, 1, 1, 1])
# P, I, D = 0.1, 0.01, 0.5 ###
P, I, D = [1/150, 1/950, 0.1, 0.01], [0.0005, 0.001, 0.01, 0.0001], [0.2, 0.0001, 0.5, 0.005]
N_episodes = 10
N_steps = 1000000
for i_episode in range(N_episodes):
state, _ = env.reset()
integral = 0
derivative = 0
prev_error = 0
for t in range(N_steps):
# print(f"step: {t}")
env.render()
error = state - desired_state
integral += error
derivative = error - prev_error
prev_error = error
pid = np.dot(P * error + I * integral + D * derivative, desired_mask)
action = sigmoid(pid)
action = np.round(action).astype(np.int32)
# print(P * error + I * integral + D * derivative, pid, action)
# print(state, action, )
state, reward, done, info, _ = env.step(action)
if done or t==N_steps-1:
print("Episode finished after {} timesteps".format(t+1))
break
env.close()
性能表现:
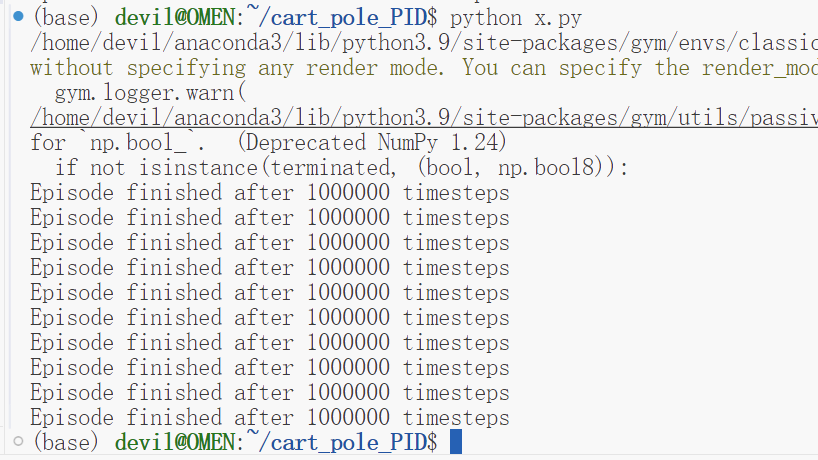
根据这个PID的系数来运行gym下的cartpole游戏,可以认为这个游泳永远不会终止,因为这里我们已经将运行长度设置为100万步。
PS:
需要注意的是PID算法的这个P,I,D系数才是影响算法的关键,而如何获得这个系数也是一个极为难的问题,很多时候是需要使用试错的方法来进行的,可以说有的P,I,D系数可以运行几十步,有的可以运行几百步或几千步,而下面的系数却可以运行上百万步,甚至是永远一直运行,可以说这种PID系数的求解才是真正的关键。
P, I, D = [1/150, 1/950, 0.1, 0.01], [0.0005, 0.001, 0.01, 0.0001], [0.2, 0.0001, 0.5, 0.005]
强化学习:使用自动控制方法PID来解决强化学习问题中的cartpole问题(小车平衡杆问题)的更多相关文章
- tp5依赖注入(自动实例化):解决了像类中的方法传对象的问题
app\index\Demo1.php namespace app\index\controller; /* 容器与依赖注入的原理 ----------------------------- 1.任何 ...
- swift 学习之自动引用计数
swift 学习之自动引用计数 学习和研究的主要是"实例对象和实例对象直接的相会强引用所产生的内从泄漏"和"使用闭包产生的强引用造成的内存泄漏" 注意:只有以引 ...
- 用深度学习(CNN RNN Attention)解决大规模文本分类问题 - 综述和实践
https://zhuanlan.zhihu.com/p/25928551 近来在同时做一个应用深度学习解决淘宝商品的类目预测问题的项目,恰好硕士毕业时论文题目便是文本分类问题,趁此机会总结下文本分类 ...
- [转] 用深度学习(CNN RNN Attention)解决大规模文本分类问题 - 综述和实践
转自知乎上看到的一篇很棒的文章:用深度学习(CNN RNN Attention)解决大规模文本分类问题 - 综述和实践 近来在同时做一个应用深度学习解决淘宝商品的类目预测问题的项目,恰好硕士毕业时论文 ...
- 【RS】Automatic recommendation technology for learning resources with convolutional neural network - 基于卷积神经网络的学习资源自动推荐技术
[论文标题]Automatic recommendation technology for learning resources with convolutional neural network ( ...
- MySQL: Starting MySQL….. ERROR! The server quit without updating PID file解决办法
MySQL: Starting MySQL….. ERROR! The server quit without updating PID file解决办法 1 问题 [root@localhost m ...
- Eclipse没法自动补全代码解决
Eclipse没法自动补全代码解决 Eclipse无法自动补全代码解决 Window->Java->Editor->Content Assist->Advanced
- jQuery EasyUI动态添加控件或者ajax加载页面后不能自动渲染问题的解决方法
博客分类: jquery-easyui jQueryAjax框架HTML 现象: AJAX返回的html无法做到自动渲染为EasyUI的样式.比如:class="easyui-layout ...
- powerdesigner 不能自动生成注释的解决方法
解决power designer 不能自动生成注释的解决办法只需要3步: 一.快捷键 Alt+Shift+X 打开脚本编辑器: 二.将下面天蓝色的字体脚本添加到脚本编辑器里面: Option Expl ...
- Win10电脑经常自动掉线、自动断网的解决方法
近期一客户称自己使用电脑上网的时候,过一段时间莫名其妙的出现自动掉线.自动断网的情况,那么遇到这个问题该怎么办?下面装机之家分享一下Win10电脑经常自动掉线.自动断网的解决方法,以Win7系统为例. ...
随机推荐
- SpringBoot 实现文件上传
参考:Java springboot进阶教程 文件上传功能实现 后端代码编写 常见错误分析与解决 在 Service 业务层接口中增加一个上传文件的方法 因为文件并不是上传至数据库中,所以不需要编写 ...
- 手写 p-map(控制并发数以及迭代处理 promise 的库)
介绍 p-map 是一个迭代处理 promise 并且能控制 promise 执行并发数的库.作者是 sindresorhus,他还创建了许多关于 promise 的库 promise-fun,感兴趣 ...
- Android Qcom USB Driver学习(十四)
UDC-Gadget UDC:(USB Device Controller)用于管理和控制USB设备与主机之间的通信. Gadget:Android在此层实现了adb,mtp(Media Transf ...
- Csharp的CancellationToken 案例
using System; using System.Collections.Generic; using System.Linq; using System.Net.Http; using Syst ...
- 云原生周刊:CNCF 宣布 Falco 毕业|2024.3.4
开源项目推荐 ldap-operator 用于部署和管理 LDAP 目录的 Kubernetes Operator. Updatecli Updatecli 是一个用于应用文件更新策略的工具.每个应用 ...
- KubeSphere 部署 Zookeeper 实战教程
前言 知识点 定级:入门级 如何利用 AI 助手辅助运维工作 单节点 Zookeeper 安装部署 集群模式 Zookeeper 安装部署 开源应用选型思想 实战服务器配置(架构 1:1 复刻小规模生 ...
- 锁的分类和JUC
锁的分类 乐观锁.悲观锁 对于同一个数据的并发操作,悲观锁认为自己在使用数据的时候一定有别的线程来修改数据,因此在获取数据的时候会先加锁,确保数据不会被别的线程修改.Java 中,synchroniz ...
- 怎样替换 rhel 7.3 的 yum
[背景] 想在自己安装的虚拟机上搭建一套 git+gitee+vscode 环境(欢迎看下期文章),发现python版本是2.7,这个版本太老 想通过yum进行更新,结果提示需要注册,索性就查查替换y ...
- 关于 PyCharm 2024安装使用 (附加永久激活码、补丁)
第一步:下载安装包 访问 IDEA 官网,下载安装包,下载链接如下 : https://www.jetbrains.com.cn/pycharm/ 第二步,安装完成之后,下载补丁 下载地址(里面包含激 ...
- 每秒550万亿次算力!打破世界纪录!中国造全球首例纯电驱全尺寸人形机器人!直击全球最快人形机器人“天工”The world's first purely electric humanoid robot
地址: https://www.youtube.com/watch?v=uRc-885NpD4