ROS-导航功能-Gazebo
前言:仿真的整体思路,先启动仿真环境,再启动导航功能。
前提:已下载并编译了相关功能包集,如还未下载,可通过git下载:https://github.com/huchunxu/ros_exploring.git
一、启动仿真环境
cd ~/catkin_ws/src/robot_mrobot/mrobot_gazebo/launch roslaunch mrobot_laser_nav_gazebo.launch
二、启动导航功能
cd ~/catkin_ws/src/robot_mrobot/mrobot_navigation/launch roslaunch fake_nav_cloister_demo.launch
三、启动自主导航
rosrun mrobot_navigation random_navigation.py
-------------------------------------------
效果如下:
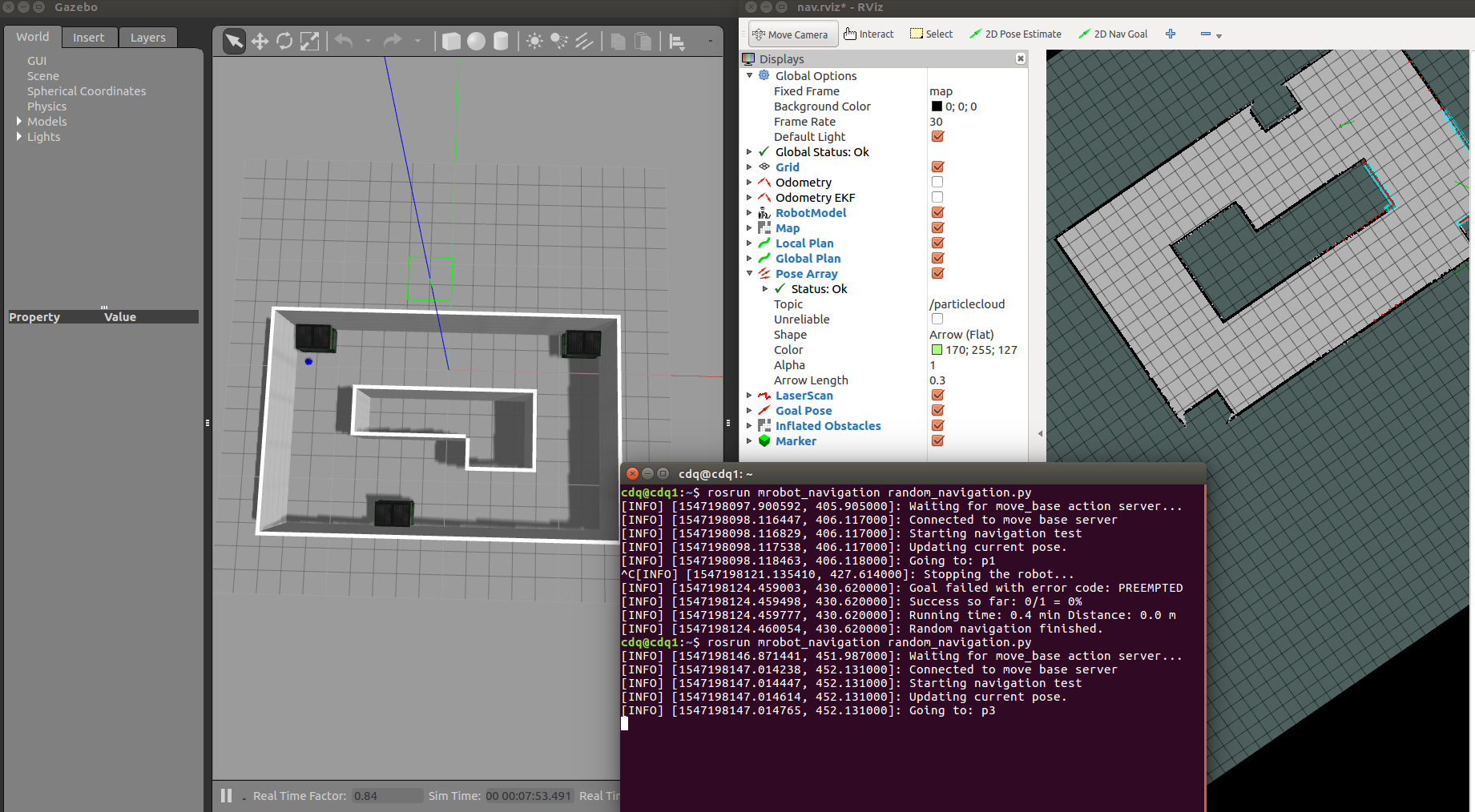
我们也可以在机器人路径上动态加入一些模型,来测试机器人的导航功能。
-END-
ROS-导航功能-Gazebo的更多相关文章
- ROS_Kinetic_x 基於ROS和Gazebo的RoboCup中型組仿真系統(多機器人協作)
國防科學技術大學發布了RoboCup中型組仿真平臺,基於ROS和Gazebo設計. 該平臺可以用於多機器人協作研究.參考資料如下: ROS新聞:1 http://www.ros.org/news ...
- ROS和Gazebo进行机器人仿真(一)
Gazebo是一种多机器人仿真器,可用于室内外机器人仿真.Gazebo在ROS中有良好的接口,包含ROS和Gazebo的所有控制. 若要实现ROS到Gazebo的通信,我们必须安装ROS-Gazebo ...
- Ubuntu ROS Arduino Gazebo学习镜像iso说明(indigo版)
ROS机器人程序设计(原书第2版)学习镜像分享及使用说明 新版已经发布,请参考: http://blog.csdn.net/zhangrelay/article/details/53324759 Ub ...
- ROS下gazebo打开出现问题
通常情况下,在装完ros后,打开gazebo, 会出现无法连接服务器获取模型的情况.这样,我们打开gazebo, 终端会提示timeout,gazebo界面没有网格. 这是因为服务器网站地址好像已经换 ...
- ROS和Gazebo进行机器人仿真(二)
一.在Gazebo中使用ROS控制器 在本节中,我们将讨论如何在Gazebo中让机器人的每个关节运动. 为了让关节动起来,我们需要分配一个ROS控制器,尤其是,我们需要为每个关节连上一个与transm ...
- ROS示例----导航功能包Husky_exploration
ROS导航功能包示例husky amcl gmapping slam exploration 此功能包包含如下文件: 结构如下: $ tree -L 2 . ├── CMakeLists.txt -& ...
- Making my own Autonomous Robot in ROS / Gazebo, Day 1: Building the static model
Day 1: Setting up ROS: Indigo OS: Ubuntu 14.04 OS: Gazebo 7.0.0 Initialize the workspace To create t ...
- ROS机器人程序设计(原书第2版)补充资料 (柒) 第七章 3D建模与仿真 urdf Gazebo V-Rep Webots Morse
ROS机器人程序设计(原书第2版)补充资料 (柒) 第七章 3D建模与仿真 urdf Gazebo V-Rep Webots Morse 书中,大部分出现hydro的地方,直接替换为indigo或ja ...
- Gazebo機器人仿真學習探索筆記(七)连接ROS
中文稍后补充,先上官方原版教程.ROS Kinetic 搭配 Gazebo 7 附件----官方教程 Tutorial: ROS integration overview As of Gazebo 1 ...
- Gazebo與ROS版本說明
使用哪种ROS / Gazebo版本的组合 介绍 本文档提供了有关将不同版本的ROS与不同版本的Gazebo结合使用的选项的概述.建议在安装Gazebo ROS包装之前阅读它.重要!简单的分析,快速和 ...
随机推荐
- ES6 中set的用法
- 【解题报告】 洛谷 P3492 [POI2009]TAB-Arrays
[解题报告] 洛谷 P3492 [POI2009]TAB-Arrays 这题是我随机跳题的时候跳到的.写完这道题之后,顺便看了一下题解,发现只有一篇题解,所以就在这里顺便写一个解题报告了. 首先当然是 ...
- 18清明校内测试T3
扫雷(mine) Time Limit:1000ms Memory Limit:128MB 题目描述 rsy最近沉迷于一款叫扫雷的游戏. 这个游戏是这样的.一开始网格上有n*m个位置,其中有一些位 ...
- 00_Rust安装及Hello World
Rust 官网: https://www.rust-lang.org 版本:nightly.beta.stable 如何设计语言的讨论:https://github.com/rust-lang/rfc ...
- CodeForces 580B(尺取法)
Kefa and Company 题意:Kefa这个人要去吃饭,他要邀请一些朋友一起去,他的每个朋友有两个属性金钱和关系度,要求邀请的人里边任意两个人之间的金钱差的绝对值不大于d:求被邀请的所有朋友的 ...
- 该页必须使用安全性较高的Web 浏览器查看
当用https访问某个网站时,IE提醒“该页必须使用安全性较高的Web 浏览器查看” 您要访问的资源使用了128位版本的“安全套接层(SSL)” 安全保护.要查看该资源,您需要使用支持该版本的SSL浏 ...
- Leetcode 42.接雨水
接雨水 给定 n 个非负整数表示每个宽度为 1 的柱子的高度图,计算按此排列的柱子,下雨之后能接多少雨水. 上面是由数组 [0,1,0,2,1,0,1,3,2,1,2,1] 表示的高度图,在这种情况下 ...
- 【无限滚动加载数据】—infinite-scroll插件的使用
网上对于infinite-scroll插件使用的例子不多.但由于它的出现,鼓吹了瀑布流形式的页面展示方式,所以不得不了解了解这种新的分页方式. 官网上有对infinite-scroll的详细描述,但一 ...
- 微信被动回复用户消息-文本消息-springmvc环境下自动生成xml
微信被动回复用户消息-文本消息-springmvc环境下自动生成xml springmvc - 大牛! private Object subscribeMessage(Scan scan) { Sca ...
- Redis 3.0.0 正式版出炉,高性能 K/V 服务
Redis 3.0.0 正式版最终到来了,与 RC6 版本号比較.该版本号改进包含: * 修复了无磁盘的复制问题 (Oran Agra) * 在角色变化后对 BLPOP 复制进行測试 (Salvato ...