ROS-导航功能-Gazebo
前言:仿真的整体思路,先启动仿真环境,再启动导航功能。
前提:已下载并编译了相关功能包集,如还未下载,可通过git下载:https://github.com/huchunxu/ros_exploring.git
一、启动仿真环境
cd ~/catkin_ws/src/robot_mrobot/mrobot_gazebo/launch roslaunch mrobot_laser_nav_gazebo.launch
二、启动导航功能
cd ~/catkin_ws/src/robot_mrobot/mrobot_navigation/launch roslaunch fake_nav_cloister_demo.launch
三、启动自主导航
rosrun mrobot_navigation random_navigation.py
-------------------------------------------
效果如下:
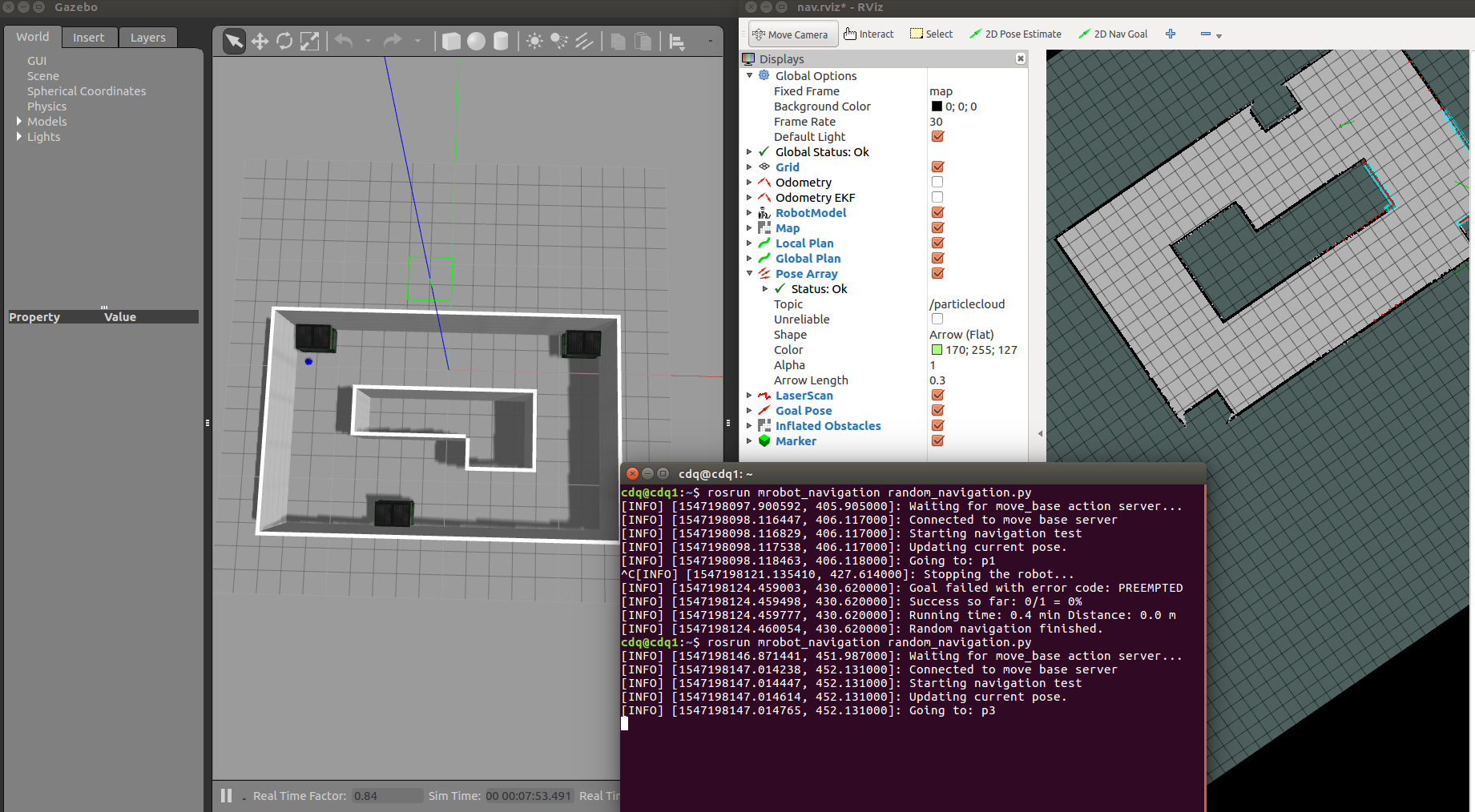
我们也可以在机器人路径上动态加入一些模型,来测试机器人的导航功能。
-END-
ROS-导航功能-Gazebo的更多相关文章
- ROS_Kinetic_x 基於ROS和Gazebo的RoboCup中型組仿真系統(多機器人協作)
國防科學技術大學發布了RoboCup中型組仿真平臺,基於ROS和Gazebo設計. 該平臺可以用於多機器人協作研究.參考資料如下: ROS新聞:1 http://www.ros.org/news ...
- ROS和Gazebo进行机器人仿真(一)
Gazebo是一种多机器人仿真器,可用于室内外机器人仿真.Gazebo在ROS中有良好的接口,包含ROS和Gazebo的所有控制. 若要实现ROS到Gazebo的通信,我们必须安装ROS-Gazebo ...
- Ubuntu ROS Arduino Gazebo学习镜像iso说明(indigo版)
ROS机器人程序设计(原书第2版)学习镜像分享及使用说明 新版已经发布,请参考: http://blog.csdn.net/zhangrelay/article/details/53324759 Ub ...
- ROS下gazebo打开出现问题
通常情况下,在装完ros后,打开gazebo, 会出现无法连接服务器获取模型的情况.这样,我们打开gazebo, 终端会提示timeout,gazebo界面没有网格. 这是因为服务器网站地址好像已经换 ...
- ROS和Gazebo进行机器人仿真(二)
一.在Gazebo中使用ROS控制器 在本节中,我们将讨论如何在Gazebo中让机器人的每个关节运动. 为了让关节动起来,我们需要分配一个ROS控制器,尤其是,我们需要为每个关节连上一个与transm ...
- ROS示例----导航功能包Husky_exploration
ROS导航功能包示例husky amcl gmapping slam exploration 此功能包包含如下文件: 结构如下: $ tree -L 2 . ├── CMakeLists.txt -& ...
- Making my own Autonomous Robot in ROS / Gazebo, Day 1: Building the static model
Day 1: Setting up ROS: Indigo OS: Ubuntu 14.04 OS: Gazebo 7.0.0 Initialize the workspace To create t ...
- ROS机器人程序设计(原书第2版)补充资料 (柒) 第七章 3D建模与仿真 urdf Gazebo V-Rep Webots Morse
ROS机器人程序设计(原书第2版)补充资料 (柒) 第七章 3D建模与仿真 urdf Gazebo V-Rep Webots Morse 书中,大部分出现hydro的地方,直接替换为indigo或ja ...
- Gazebo機器人仿真學習探索筆記(七)连接ROS
中文稍后补充,先上官方原版教程.ROS Kinetic 搭配 Gazebo 7 附件----官方教程 Tutorial: ROS integration overview As of Gazebo 1 ...
- Gazebo與ROS版本說明
使用哪种ROS / Gazebo版本的组合 介绍 本文档提供了有关将不同版本的ROS与不同版本的Gazebo结合使用的选项的概述.建议在安装Gazebo ROS包装之前阅读它.重要!简单的分析,快速和 ...
随机推荐
- javascript中 (function(){})();如何理解?
javascript中 (function(){})();如何理解? javascript中: (function(){})()是匿名函数,主要利用函数内的变量作用域,避免产生全局变量,影响整体页面环 ...
- matplotlib命令与格式:标题(title),标注(annotate),文字说明(text)
1.title设置图像标题 (1)title常用参数 fontsize设置字体大小,默认12,可选参数 ['xx-small', 'x-small', 'small', 'medium', 'la ...
- PAT 1094. The Largest Generation (层级遍历)
A family hierarchy is usually presented by a pedigree tree where all the nodes on the same level bel ...
- CF410div2 A. Mike and palindrome
/* CF410div2 A. Mike and palindrome http://codeforces.com/contest/798/problem/A 水题 */ #include <c ...
- Clojure:将两个list合并成一个map
假设我们有两个list,分别是: (def a [“one” “two” “three”]) (def b [1 2 3]) 我们要把它们合为一个键值对应的map,做法很简单: 1. 先将a和b合为一 ...
- Java单元測试工具JUnit 5新特性一览
Java单元測试工具JUnit 5新特性一览 作者:chszs,未经博主同意不得转载. 经许可的转载需注明作者和博客主页:http://blog.csdn.net/chszs JUnit是最流行的开源 ...
- POJ题目1947 Rebuilding Roads(树形dp)
Rebuilding Roads Time Limit: 1000MS Memory Limit: 30000K Total Submissions: 9957 Accepted: 4537 ...
- Resources.Theme
public final class Resources.Theme extends Object java.lang.Object ↳ android.content.res.Resource ...
- luogu1070 道路游戏 单调队列
题目大意 小新正在玩一个简单的电脑游戏. 游戏中有一条环形马路,马路上有 nn 个机器人工厂,两个相邻机器人工厂之间由一小段马路连接.小新以某个机器人工厂为起点,按顺时针顺序依次将这 nn 个机器人工 ...
- 使用tortoisegit修改日志
http://stackoverflow.com/questions/17647936/how-do-i-edit-an-incorrect-commit-message-with-tortoiseg ...