Opencv分水岭算法——watershed自动图像分割用法
分水岭算法是一种图像区域分割法,在分割的过程中,它会把跟临近像素间的相似性作为重要的参考依据,从而将在空间位置上相近并且灰度值相近的像素点互相连接起来构成一个封闭的轮廓,封闭性是分水岭算法的一个重要特征。
其他图像分割方法,如阈值,边缘检测等都不会考虑像素在空间关系上的相似性和封闭性这一概念,彼此像素间互相独立,没有统一性。分水岭算法较其他分割方法更具有思想性,更符合人眼对图像的印象。
其他关于分水岭“聚水盆地”、“水坝”、“分水线”等概念不准备赘述,只探讨一下Opencv中分水岭算法的实现方法watershed——这个“简单”到只有两个参数的函数是如何工作的。
Opencv 中 watershed函数原型:
void watershed( InputArray image, InputOutputArray markers );第一个参数 image,必须是一个8bit 3通道彩色图像矩阵序列,第一个参数没什么要说的。关键是第二个参数 markers,Opencv官方文档的说明如下:
Before passing the image to the function, you have to roughly outline the desired regions in the image markers with positive (>0) indices. So, every region
is represented as one or more connected components with the pixel values 1, 2, 3, and so on. Such markers can be retrieved from a binary mask using findContours() and drawContours(). The markers are “seeds” of the future image regions. All the other pixels
in markers , whose relation to the outlined regions is not known and should be defined by the algorithm, should be set to 0’s. In the function output, each pixel in markers is set to a value of the “seed” components or to -1 at boundaries between the regions.
就不一句一句翻译了,大意说的是在执行分水岭函数watershed之前,必须对第二个参数markers进行处理,它应该包含不同区域的轮廓,每个轮廓有一个自己唯一的编号,轮廓的定位可以通过Opencv中findContours方法实现,这个是执行分水岭之前的要求。
接下来执行分水岭会发生什么呢?算法会根据markers传入的轮廓作为种子(也就是所谓的注水点),对图像上其他的像素点根据分水岭算法规则进行判断,并对每个像素点的区域归属进行划定,直到处理完图像上所有像素点。而区域与区域之间的分界处的值被置为“-1”,以做区分。
简单概括一下就是说第二个入参markers必须包含了种子点信息。Opencv官方例程中使用鼠标划线标记,其实就是在定义种子,只不过需要手动操作,而使用findContours可以自动标记种子点。而分水岭方法完成之后并不会直接生成分割后的图像,还需要进一步的显示处理,如此看来,只有两个参数的watershed其实并不简单。
下边通过图示来看一下watershed函数的第二个参数markers在算法执行前后发生了什么变化。对于一个原图:

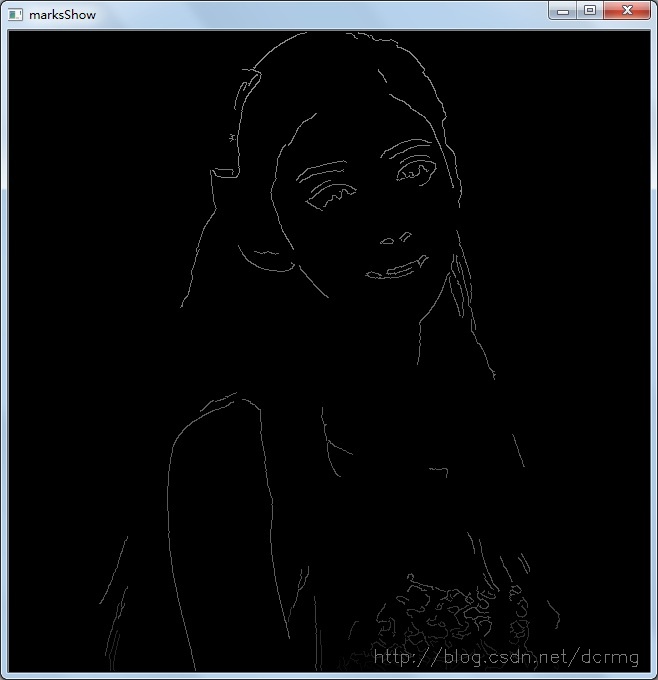
经过灰度化、滤波、Canny边缘检测、findContours轮廓查找、轮廓绘制等步骤后终于得到了符合Opencv要求的merkers,我们把merkers转换成8bit单通道灰度图看看它里边到底是什么内容:
这个是分水岭运算前的merkers:
这个是findContours检测到的轮廓:
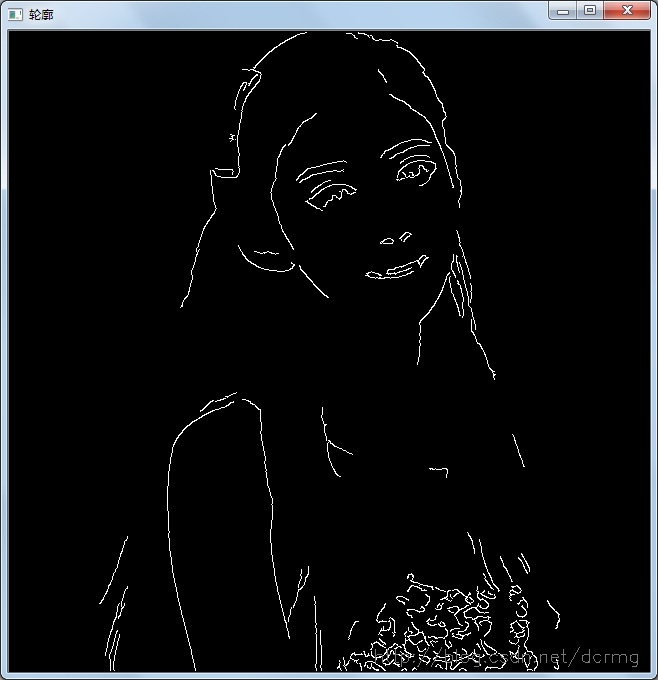
看效果,基本上跟图像的轮廓是一样的,也是简单的勾勒出了物体的外形。但如果仔细观察就能发现,图像上不同线条的灰度值是不同的,底部略暗,越往上灰度越高。由于这幅图像边缘比较少,对比不是很明显,再来看一幅轮廓数量较多的图效果:
这个是分水岭运算前的merkers:

这个是findContours检测到的轮廓:
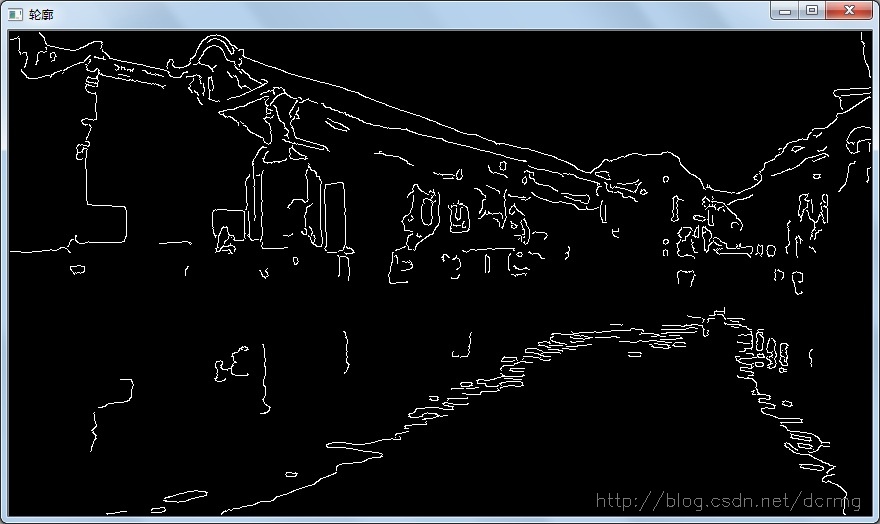
从这两幅图对比可以很明显看到,从图像底部往上,线条的灰度值是越来越高的,并且merkers图像底部部分线条的灰度值由于太低,已经观察不到了。相互连接在一起的线条灰度值是一样的,这些线条和不同的灰度值又能说明什么呢?
答案是:每一个线条代表了一个种子,线条的不同灰度值其实代表了对不同注水种子的编号,有多少不同灰度值的线条,就有多少个种子,图像最后分割后就有多少个区域。
再来看一下执行完分水岭方法之后merkers里边的内容发生了什么变化:
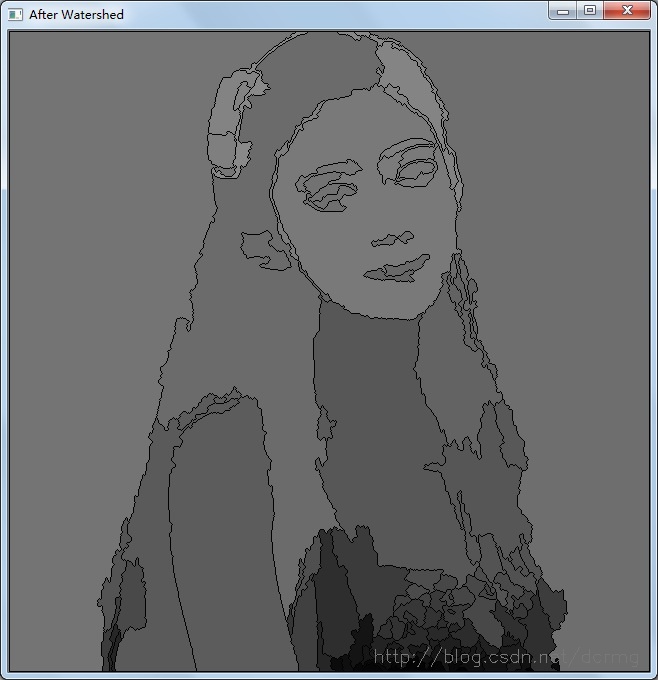
可以看到,执行完watershed之后,merkers里边被分割出来的区域已经非常明显了,空间上临近并且灰度值上相近的区域被划分为一个区域,灰度值是一样,不同区域间被划分开,这其实就是分水岭对图像的分割效果了。
总的概括一下watershed图像自动分割的实现步骤:
1. 图像灰度化、滤波、Canny边缘检测
2. 查找轮廓,并且把轮廓信息按照不同的编号绘制到watershed的第二个入参merkers上,相当于标记注水点。
3.
watershed分水岭运算
4.
绘制分割出来的区域,视觉控还可以使用随机颜色填充,或者跟原始图像融合以下,以得到更好的显示效果。
以下是Opencv分水岭算法watershed实现的完整过程:
#include "opencv2/imgproc/imgproc.hpp"
#include "opencv2/highgui/highgui.hpp"
#include <iostream>
using namespace cv;
using namespace std;
Vec3b RandomColor(int value); //生成随机颜色函数
int main( int argc, char* argv[] )
{
Mat image=imread(argv[1]); //载入RGB彩色图像
imshow("Source Image",image);
//灰度化,滤波,Canny边缘检测
Mat imageGray;
cvtColor(image,imageGray,CV_RGB2GRAY);//灰度转换
GaussianBlur(imageGray,imageGray,Size(5,5),2); //高斯滤波
imshow("Gray Image",imageGray);
Canny(imageGray,imageGray,80,150);
imshow("Canny Image",imageGray);
//查找轮廓
vector<vector<Point>> contours;
vector<Vec4i> hierarchy;
findContours(imageGray,contours,hierarchy,RETR_TREE,CHAIN_APPROX_SIMPLE,Point());
Mat imageContours=Mat::zeros(image.size(),CV_8UC1); //轮廓
Mat marks(image.size(),CV_32S); //Opencv分水岭第二个矩阵参数
marks=Scalar::all(0);
int index = 0;
int compCount = 0;
for( ; index >= 0; index = hierarchy[index][0], compCount++ )
{
//对marks进行标记,对不同区域的轮廓进行编号,相当于设置注水点,有多少轮廓,就有多少注水点
drawContours(marks, contours, index, Scalar::all(compCount+1), 1, 8, hierarchy);
drawContours(imageContours,contours,index,Scalar(255),1,8,hierarchy);
}
//我们来看一下传入的矩阵marks里是什么东西
Mat marksShows;
convertScaleAbs(marks,marksShows);
imshow("marksShow",marksShows);
imshow("轮廓",imageContours);
watershed(image,marks);
//我们再来看一下分水岭算法之后的矩阵marks里是什么东西
Mat afterWatershed;
convertScaleAbs(marks,afterWatershed);
imshow("After Watershed",afterWatershed);
//对每一个区域进行颜色填充
Mat PerspectiveImage=Mat::zeros(image.size(),CV_8UC3);
for(int i=0;i<marks.rows;i++)
{
for(int j=0;j<marks.cols;j++)
{
int index=marks.at<int>(i,j);
if(marks.at<int>(i,j)==-1)
{
PerspectiveImage.at<Vec3b>(i,j)=Vec3b(255,255,255);
}
else
{
PerspectiveImage.at<Vec3b>(i,j) =RandomColor(index);
}
}
}
imshow("After ColorFill",PerspectiveImage);
//分割并填充颜色的结果跟原始图像融合
Mat wshed;
addWeighted(image,0.4,PerspectiveImage,0.6,0,wshed);
imshow("AddWeighted Image",wshed);
waitKey();
}
Vec3b RandomColor(int value) <span style="line-height: 20.8px; font-family: sans-serif;">//生成随机颜色函数</span>
{
value=value%255; //生成0~255的随机数
RNG rng;
int aa=rng.uniform(0,value);
int bb=rng.uniform(0,value);
int cc=rng.uniform(0,value);
return Vec3b(aa,bb,cc);
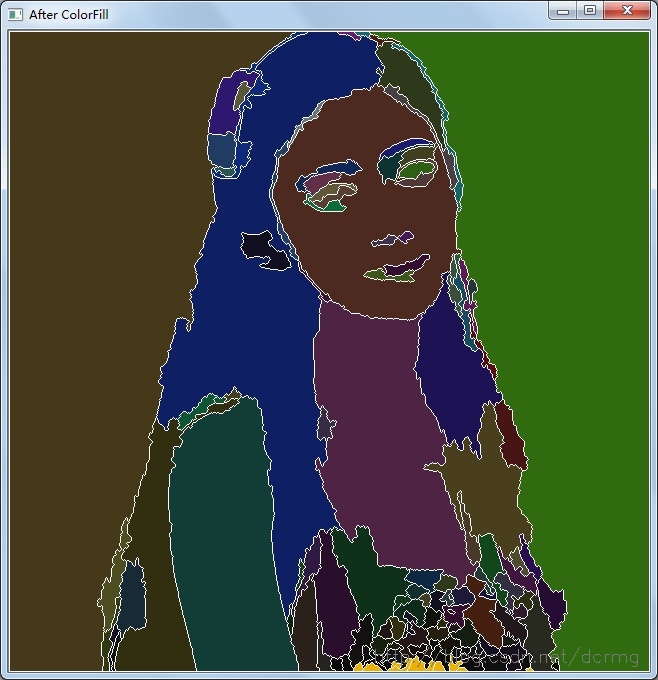
}第一幅图像分割效果:
按比例跟原始图像融合:

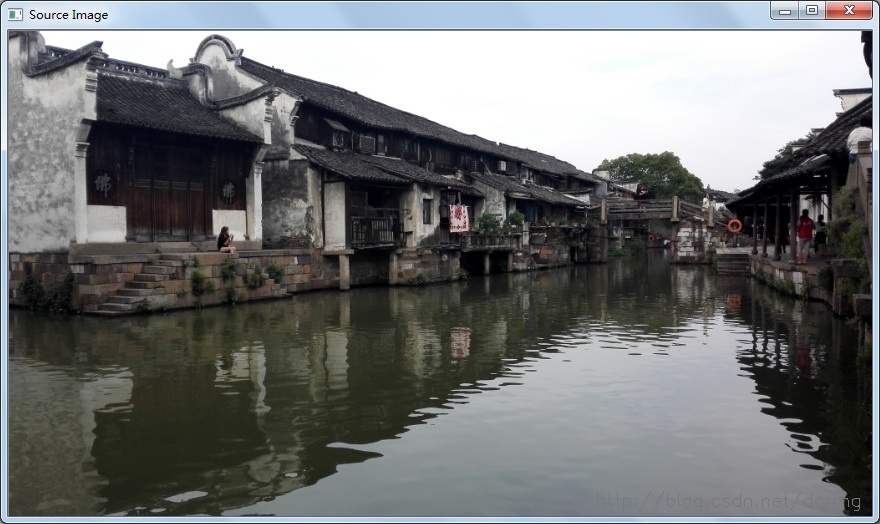
第二幅图像原始图:
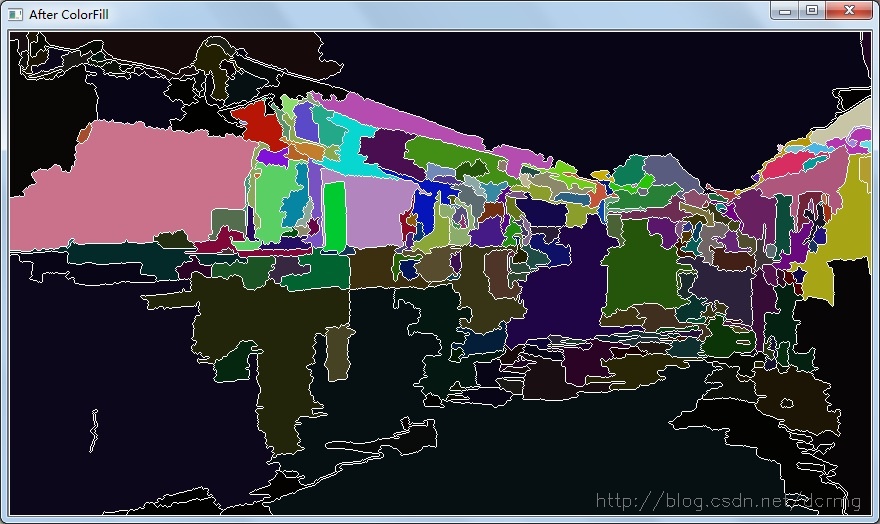
分割效果:
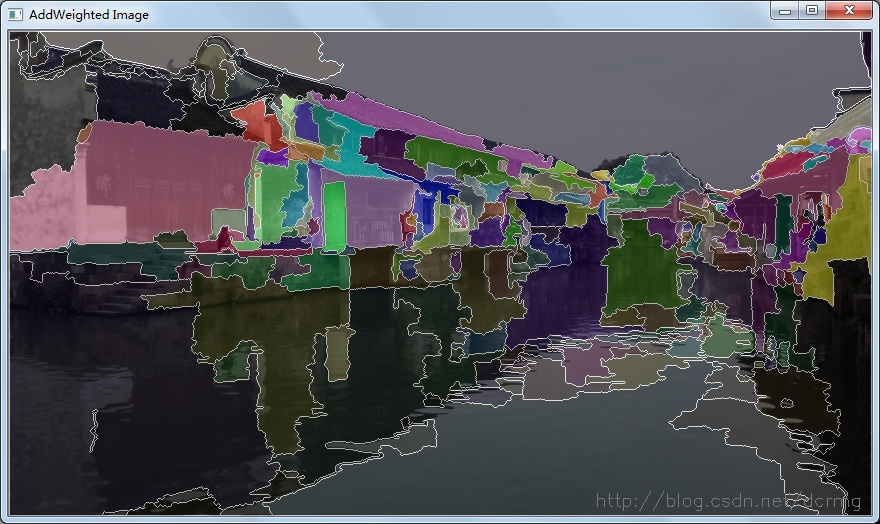
按比例跟原始图像融合:
Opencv分水岭算法——watershed自动图像分割用法的更多相关文章
- OpenCV——距离变换与分水岭算法的(图像分割)
C++: void distanceTransform(InputArray src, OutputArray dst, int distanceType, int maskSize) 参数详解: I ...
- opencv分水岭算法对图像进行切割
先看效果 说明 使用分水岭算法对图像进行切割,设置一个标记图像能达到比較好的效果,还能防止过度切割. 1.这里首先对阈值化的二值图像进行腐蚀,去掉小的白色区域,得到图像的前景区域.并对前景区域用255 ...
- OpenCV——分水岭算法
分水岭算法,是一种基于拓扑理论的数学形态学的分割方法,其基本思想是把图像看作是测地学上的拓扑地貌,图像中每一点像素的灰度值表示该点的海拔高度,每一个局部极小值及其影响区域称为集水盆,而集水盆的边界则形 ...
- OpenCV 学习笔记 04 深度估计与分割——GrabCut算法与分水岭算法
1 使用普通摄像头进行深度估计 1.1 深度估计原理 这里会用到几何学中的极几何(Epipolar Geometry),它属于立体视觉(stereo vision)几何学,立体视觉是计算机视觉的一个分 ...
- OpenCV学习(8) 分水岭算法(2)
现在我们看看OpenCV中如何使用分水岭算法. 首先我们打开一副图像: // 打开另一幅图像 cv::Mat image= cv::imread("../to ...
- OpenCV学习(9) 分水岭算法(3)
本教程我学习一下opencv中分水岭算法的具体实现方式. 原始图像和Mark图像,它们的大小都是32*32,分水岭算法的结果是得到两个连通域的轮廓图. 原始图像:(原始图像必须是3通道图像) Mark ...
- python实现分水岭算法分割遥感图像
1. 定义 分水岭算法(watershed algorithm)可以将图像中的边缘转化为"山脉",将均匀区域转化为"山谷",在这方面有助于分割目标. 分水岭算法 ...
- 分水岭算法(理论+opencv实现)
分水岭算法理论 从意思上就知道通过用水来进行分类,学术上说什么基于拓扑结构的形态学...其实就是根据把图像比作一副地貌,然后通过最低点和最高点去分类! 原始的分水岭: 就是上面说的方式,接下来用一幅图 ...
- opencv::分水岭图像分割
分水岭分割方法原理 (3种) - 基于浸泡理论的分水岭分割方法 (距离) - 基于连通图的方法 - 基于距离变换的方法 图像形态学操作: - 腐蚀与膨胀 - 开闭操作 分水岭算法运用 - 分割粘连对象 ...
随机推荐
- centos7基础配置
记录虚拟机安装完成后的初始配置: 1.网络: 桥接方式,设置静态ip,与物理机同一网段 Ip配置 配置完成 service network restart ,重启网络后 物理机可ssh连接虚拟机系统. ...
- Lusac定理
转载大佬的模版:http://www.cnblogs.com/vongang/archive/2012/12/02/2798138.html
- STM32上使用JSON
一.STM32工程中添加JSON 最近在一网2串项目,串口和网口之间可能需要定义一下简单的通信协议,而通信协议上则需要去定义一下通信的数据格式,上次听剑锋说要用Json来定义,目前查了下资料具体如何去 ...
- Oracle 10g 10.2.0.1 在Oracle Linux 5.4 32Bit RAC安装手冊(一抹曦阳)
Oracle 10g 10.2.0.1 在Oracle Linux 5.4 32Bit RAC安装手冊(一抹曦阳).pdf下载地址 ,step by step http://download.csdn ...
- FileChannel的深入理解
一,官方描写叙述 一个读,写,映射,操作文件的通道. 文件通道有能够被查询和改动的一个当前位置.文件本身包括了一个可悲读写的变长字节序列,而且它的当前的size会被查询.当被写入的字节超过当前文件的大 ...
- Extjs, 使用GridPanel出现 Layout run failed
当GridPanel被加入到容器,且容器的layout为vbox时候, 会出现 Layout run failed 后者GridPanel的尺寸没有撑满父容器 网上找到的解决的方法是.要给父容器设置一 ...
- eclipse- DDMS截图功能使用
如何使用eclipse的截图功能呢 1.打开eclipse 2.连接手机 3.打开eclipse的DDMS插件. 4.选中手机 5.点击上面的摄像机图标,就可以截图了 如果你打开了DDMS以后,没有发 ...
- 7.Maven之(七)pom.xml配置文件详解
转自:https://blog.csdn.net/qq_33363618/article/details/79438044 setting.xml主要用于配置maven的运行环境等一系列通用的属性,是 ...
- 我的第一个JS组件-跨浏览器JS调试工具
武汉九天鸟-p2p网贷系统开发-互联网应用软件开发 公司官网:http://jiutianniao.com 社交问答:http://ask.jiutianniao.com 最近,在看公司一个JS大牛 ...
- Android系统如何管理自己内存的?
本文来自http://blog.csdn.net/liuxian13183/ ,引用必须注明出处! 机缘巧合写下这篇博客,作为个人工作经验的总结,不足之处,随后补上. 安卓是基于Linux2.6内核的 ...