使用STM32控制TMC5160驱动步进电机

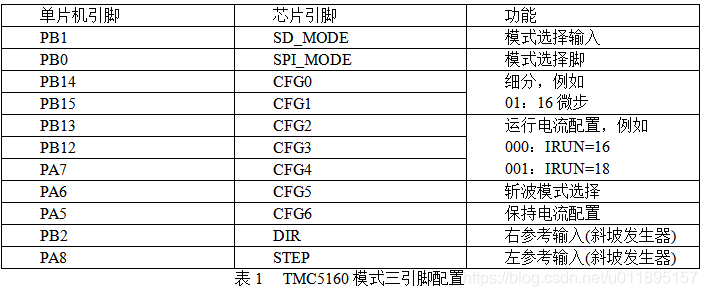
void TMC5160_Init3(void) //模式三独立模式
{
GPIO_InitTypeDef GPIO_Initure; __HAL_RCC_GPIOB_CLK_ENABLE(); //开启GPIOB时钟
__HAL_RCC_GPIOA_CLK_ENABLE(); //开启GPIOA时钟 GPIO_Initure.Pin=GPIO_PIN_5|GPIO_PIN_6|GPIO_PIN_7|GPIO_PIN_8;
GPIO_Initure.Mode=GPIO_MODE_OUTPUT_PP; //推挽输出
GPIO_Initure.Pull=GPIO_PULLUP; //上拉
GPIO_Initure.Speed=GPIO_SPEED_FREQ_HIGH; //高速
HAL_GPIO_Init(GPIOA,&GPIO_Initure); GPIO_Initure.Pin=GPIO_PIN_0|GPIO_PIN_1|GPIO_PIN_2|GPIO_PIN_12|GPIO_PIN_13|GPIO_PIN_14|GPIO_PIN_15;
GPIO_Initure.Mode=GPIO_MODE_OUTPUT_PP; //推挽输出
GPIO_Initure.Pull=GPIO_PULLUP; //上拉
GPIO_Initure.Speed=GPIO_SPEED_FREQ_HIGH; //高速
HAL_GPIO_Init(GPIOB,&GPIO_Initure); HAL_GPIO_WritePin(GPIOA,GPIO_PIN_6|GPIO_PIN_5,GPIO_PIN_SET);
HAL_GPIO_WritePin(GPIOA,GPIO_PIN_7,GPIO_PIN_RESET);
HAL_GPIO_WritePin(GPIOB,GPIO_PIN_14|GPIO_PIN_13|GPIO_PIN_12|GPIO_PIN_1,GPIO_PIN_SET);
HAL_GPIO_WritePin(GPIOB,GPIO_PIN_15|GPIO_PIN_2|GPIO_PIN_0,GPIO_PIN_RESET);
}
void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim)
{
if(htim==(&TIM3_Handler))
{
COUNT++;
A8=~A8; if(COUNT>=6400)
{
//HAL_NVIC_DisableIRQ(TIM3_IRQn);
LED=1; //转一圈,停2s后继续
delay_ms(2000);
LED=0;
COUNT=0;
}
}
}
使用STM32控制TMC5160驱动步进电机的更多相关文章
- STM32 控制步进电机 28BYJ-48
STM32 控制步进电机 28BYJ-48 http://blog.chinaunix.net/uid-12664992-id-300272.html 步进电机驱动最简化的逻辑: //四相八拍:A- ...
- STM32F103控制两个步进电机按照一定转速比运动
这个暑假没有回家,在学校准备九月份的电子设计竞赛.今天想给大家分享一下STM32定时器控制两个步进电机按照一定速度比转动的问题. 这次做的05年的电子设计竞赛题目,运动悬挂系统..本实验是控制两个步进 ...
- FPGA驱动步进电机
步进电机 步进电机是将电脉冲信号转变为角位移或线位移的开环控制电机,是现代数字程序控制系统中的主要执行元件,应用极为广泛.在非超载的情况下,电机的转速.停止的位置只取决于脉冲信号的频率和脉冲数,而不受 ...
- python代码实现树莓派3b+驱动步进电机
python代码实现树莓派3b+驱动步进电机 之前买了个树莓派,刚买回来那会儿热情高涨,折腾了一段时间,然后就放那吃灰了.前几天忽然想起来这个东西了,决定再玩玩儿,于是就从某宝上购买了一套步进电机.驱 ...
- arduino中驱动 步进电机
参考:https://www.arduino.cn/thread-75936-1-1.html 知识点: 步进电机是一种将电脉冲转化为角位移的执行机构.通俗一点讲:当步进驱动器接收到一个脉冲信号 ...
- STM32硬件IIC驱动设计(转)
源: STM32硬件IIC驱动设计 参考: STM32—硬件IIC主机通信 STM32’s I2C 硬件BUG引发的血案(qzm) 解决STM32 I2C接口死锁在BUSY状态的方法讨论
- MPU6050工作原理及STM32控制MPU6050
源:MPU6050工作原理及STM32控制MPU6050 MPU6050 介绍
- STM32移植USB驱动总结
https://blog.csdn.net/stm32_newlearner/article/details/88095944 stm32 移植usb驱动开发 单片机 STM32单片机和51单片机 ...
- stm32控制步进电机加减速
实习公司项目需要控制步进电机,电机方面主要包括控制运动.加减速.限位.下面介绍一下在电机控制方面的心得,由于对于电机的控制不需要很精确,并且自身能力有限,相比于大牛有很大的差距. 1.需要实现的功能 ...
随机推荐
- React.js中JSX的原理与关键实现
在开始开发之前,我们需要创建一个空项目文件夹.安装 初始化 npm init -y 2.安装webpack相关依赖 npm install webpack webpack-cli -D 安装babel ...
- 我用Python做了一个咖啡馆数据分析
在做案例前,我还想回答大家一个疑问,就是excel做数据分析可以实现Python一样的效果,那用Python的意义在哪呢? 经过这段时间学习理解,我的回答是: (https://jq.qq.com/? ...
- Cron表达式(七子表达式)
一.七子含义 秒 分 时 日 月 周 年 可用的值 0~59 0~59 0~23 1~31 112(JANDEC) 17(SUNSAT) 1970~2099 可用的通配符 , - * / , - * ...
- 多校联训 DS 专题
CF1039D You Are Given a Tree 容易发现,当 \(k\) 不断增大时,答案不断减小,且 \(k\) 的答案不超过 \(\lfloor\frac {n}{k}\rfloor\) ...
- Python 内置logging 使用详细讲
logging 的主要作用 提供日志记录的接口和众多处理模块,供用户存储各种格式的日志,帮助调试程序或者记录程序运行过程中的输出信息. logging 日志等级 logging 日志等级分为五个等级, ...
- IIS部署的H5的单页面跳转的配置
<?xml version="1.0" encoding="UTF-8"?><configuration> <system.web ...
- 教你使用CANN将照片一键转换成卡通风格
摘要:这次是将AnimeGAN部署到Ascend 310,从而实现对自己想要图片的一键转换为我们想看到的卡通风格. 本文分享自华为云社区<[CANN训练营]CANN训练营_昇腾AI趣味应用实现A ...
- 04.nvue开发
nvue开发注意项 nvue专用内置组件跟api https://uniapp.dcloud.io/nvue-outline?id=_2开发nvue页面 网络示例 https://www.cnblog ...
- AtCoder Beginner Contest 261E // 按位思考 + dp
题目链接:E - Many Operations (atcoder.jp) 题意: 给定一个数x,以及n个操作(ti,ai): 当 t = 1 时,将 x & a 当 t = 2 时,将 x ...
- TechEmpower 21轮Web框架 性能评测 -- C# 的性能 和 Rust、C++并驾齐驱
自从2021年2月第20轮公布的测试以后,一年半后 的2022年7月19日 发布了 TechEmpower 21轮测试报告:Round 21 results - TechEmpower Framewo ...