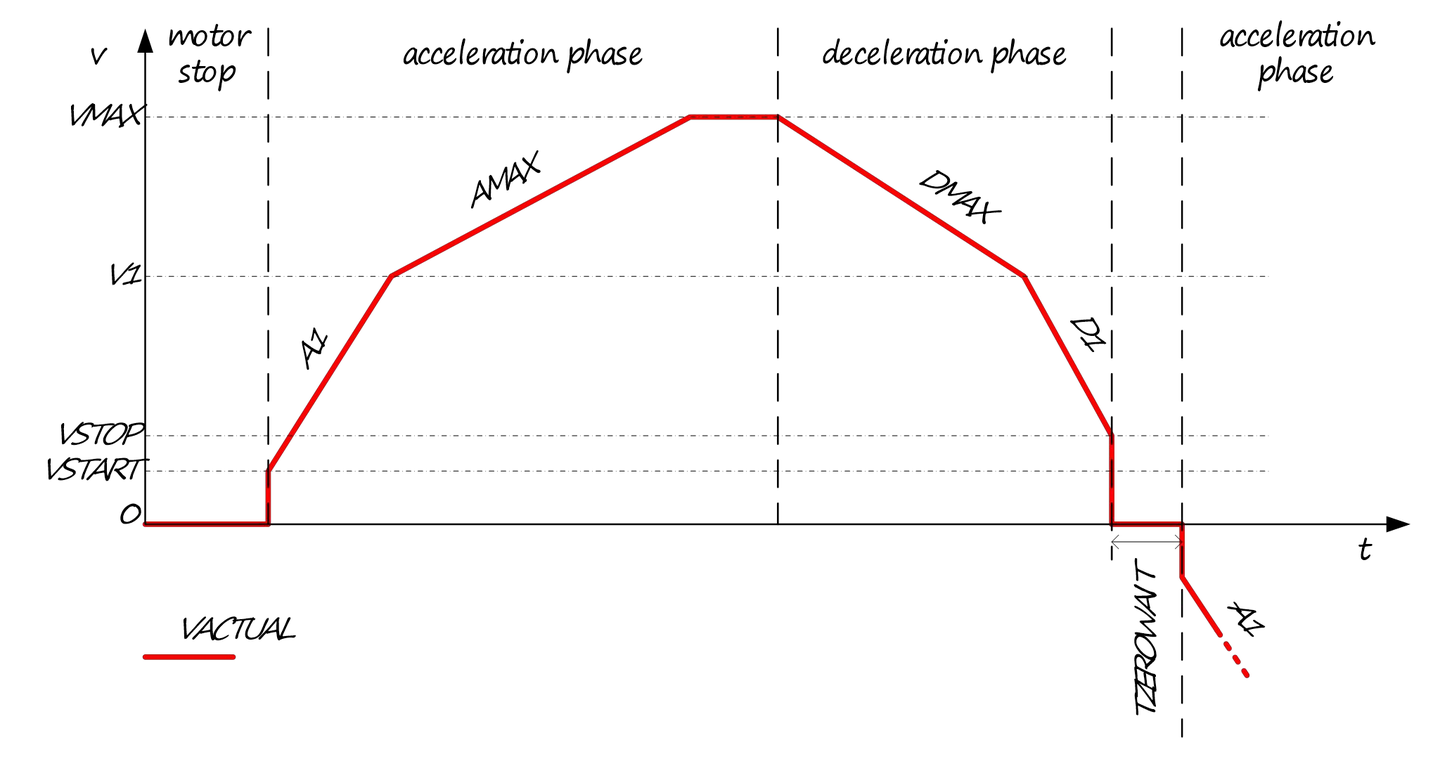
使用STM32控制TMC5160驱动步进电机

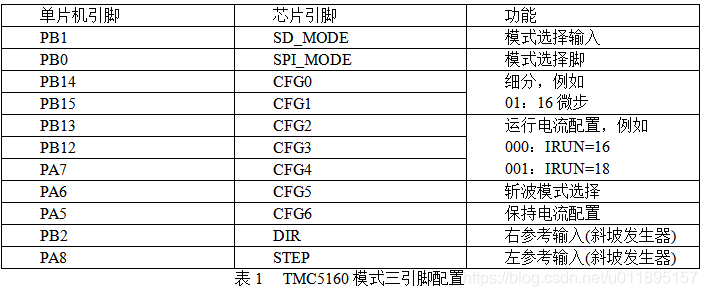
void TMC5160_Init3(void) //模式三独立模式
{
GPIO_InitTypeDef GPIO_Initure; __HAL_RCC_GPIOB_CLK_ENABLE(); //开启GPIOB时钟
__HAL_RCC_GPIOA_CLK_ENABLE(); //开启GPIOA时钟 GPIO_Initure.Pin=GPIO_PIN_5|GPIO_PIN_6|GPIO_PIN_7|GPIO_PIN_8;
GPIO_Initure.Mode=GPIO_MODE_OUTPUT_PP; //推挽输出
GPIO_Initure.Pull=GPIO_PULLUP; //上拉
GPIO_Initure.Speed=GPIO_SPEED_FREQ_HIGH; //高速
HAL_GPIO_Init(GPIOA,&GPIO_Initure); GPIO_Initure.Pin=GPIO_PIN_0|GPIO_PIN_1|GPIO_PIN_2|GPIO_PIN_12|GPIO_PIN_13|GPIO_PIN_14|GPIO_PIN_15;
GPIO_Initure.Mode=GPIO_MODE_OUTPUT_PP; //推挽输出
GPIO_Initure.Pull=GPIO_PULLUP; //上拉
GPIO_Initure.Speed=GPIO_SPEED_FREQ_HIGH; //高速
HAL_GPIO_Init(GPIOB,&GPIO_Initure); HAL_GPIO_WritePin(GPIOA,GPIO_PIN_6|GPIO_PIN_5,GPIO_PIN_SET);
HAL_GPIO_WritePin(GPIOA,GPIO_PIN_7,GPIO_PIN_RESET);
HAL_GPIO_WritePin(GPIOB,GPIO_PIN_14|GPIO_PIN_13|GPIO_PIN_12|GPIO_PIN_1,GPIO_PIN_SET);
HAL_GPIO_WritePin(GPIOB,GPIO_PIN_15|GPIO_PIN_2|GPIO_PIN_0,GPIO_PIN_RESET);
}
void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim)
{
if(htim==(&TIM3_Handler))
{
COUNT++;
A8=~A8; if(COUNT>=6400)
{
//HAL_NVIC_DisableIRQ(TIM3_IRQn);
LED=1; //转一圈,停2s后继续
delay_ms(2000);
LED=0;
COUNT=0;
}
}
}
使用STM32控制TMC5160驱动步进电机的更多相关文章
- STM32 控制步进电机 28BYJ-48
STM32 控制步进电机 28BYJ-48 http://blog.chinaunix.net/uid-12664992-id-300272.html 步进电机驱动最简化的逻辑: //四相八拍:A- ...
- STM32F103控制两个步进电机按照一定转速比运动
这个暑假没有回家,在学校准备九月份的电子设计竞赛.今天想给大家分享一下STM32定时器控制两个步进电机按照一定速度比转动的问题. 这次做的05年的电子设计竞赛题目,运动悬挂系统..本实验是控制两个步进 ...
- FPGA驱动步进电机
步进电机 步进电机是将电脉冲信号转变为角位移或线位移的开环控制电机,是现代数字程序控制系统中的主要执行元件,应用极为广泛.在非超载的情况下,电机的转速.停止的位置只取决于脉冲信号的频率和脉冲数,而不受 ...
- python代码实现树莓派3b+驱动步进电机
python代码实现树莓派3b+驱动步进电机 之前买了个树莓派,刚买回来那会儿热情高涨,折腾了一段时间,然后就放那吃灰了.前几天忽然想起来这个东西了,决定再玩玩儿,于是就从某宝上购买了一套步进电机.驱 ...
- arduino中驱动 步进电机
参考:https://www.arduino.cn/thread-75936-1-1.html 知识点: 步进电机是一种将电脉冲转化为角位移的执行机构.通俗一点讲:当步进驱动器接收到一个脉冲信号 ...
- STM32硬件IIC驱动设计(转)
源: STM32硬件IIC驱动设计 参考: STM32—硬件IIC主机通信 STM32’s I2C 硬件BUG引发的血案(qzm) 解决STM32 I2C接口死锁在BUSY状态的方法讨论
- MPU6050工作原理及STM32控制MPU6050
源:MPU6050工作原理及STM32控制MPU6050 MPU6050 介绍
- STM32移植USB驱动总结
https://blog.csdn.net/stm32_newlearner/article/details/88095944 stm32 移植usb驱动开发 单片机 STM32单片机和51单片机 ...
- stm32控制步进电机加减速
实习公司项目需要控制步进电机,电机方面主要包括控制运动.加减速.限位.下面介绍一下在电机控制方面的心得,由于对于电机的控制不需要很精确,并且自身能力有限,相比于大牛有很大的差距. 1.需要实现的功能 ...
随机推荐
- opencv-python获取视频信息
代码 import cv2 if __name__ == '__main__': # 读取视频 capture = cv2.VideoCapture('./videos/person.mp4') # ...
- 在Ubuntu系统下,可执行文件的表现形式
在Windows系统下的可执行文件都带有.exe的后缀,而对于Linux系统下的可执行文件,则不会带有后缀,如下图 对于.txt文件,Ubuntu下也有相应的记事本程序打开,对于.xml,ubuntu ...
- UiPath屏幕抓取Screen Scraping的介绍和使用
一.屏幕抓取(Screen Scraping)的介绍 屏幕抓取使您能够在特定的UI元素或文档(如.PDF文档)中提取数据 二.屏幕抓取(Screen Scraping)在UiPath中的使用 [if ...
- 【python基础】第09回 数据类型内置方法 01
本章内容概要 1.数据类型的内置方法简介 2.整型相关方法 3.浮点型相关方法 4.字符串相关方法 5.列表相关方法 本章内容详情 1.数据类型的内置方法简介 数据类型是用来记录事物状态的,而事物的状 ...
- NC17857 起床困难综合症
NC17857 起床困难综合症 题目 题目描述 21 世纪,许多人得了一种奇怪的病:起床困难综合症,其临床表现为:起床难,起床后精神不佳.作为一名青春阳光好少年,atm 一直坚持与起床困难综合症作斗争 ...
- 高级程序员必知必会,一文详解MySQL主从同步原理,推荐收藏
1. MySQL主从同步实现方式 MySQL主从同步是基于Bin Log实现的,而Bin Log记录的是原始SQL语句. Bin Log共有三种日志格式,可以binlog_format配置参数指定. ...
- 活动报名 | 如何基于开源项目 Tapdata PDK,快速完成数据源和目标的开发?
近日,Tapdata 启动 PDK 插件生态共建计划,宣布开源插件开发框架 Tapdata PDK,将自身的数据接口能力开放出来,帮助开发者根据实际需求,自助接入数据源和目标,快速开启「Data ...
- 使用Tapdata一步搞定关系型数据库到MongoDB的战略迁移
摘要:数据库作为最关键的基础设施,随着互联网时代的信息高速增长,关系型数据库因其高门槛.高成本以及扩展性差等原因导致的局限性逐渐浮出水面,如今更是面临诸多问题和挑战,Tapdata 专注新一代实时 ...
- Solution -「校内题」Xorequ
0x00 前置芝士 数位dp考试里出现的小神题?? 显然考场会选择打表找规律. 数位dp + 矩阵快速幂 0x01 题目描述 给定正整数 \(n\),现有如下方程 \(x \bigoplus 3x = ...
- Java通过反射注解赋值
前段时间,领导分配一个统计销售区域汇总的数据,解决方案使用到了反射获取注解,通过注解获取属性或者设置字段属性. 问题描述 查询公司列表,分别是公司id.区域id.区域名称: 公司id 区域id 区域名 ...