behavior planning——12.example cost funtion -lane change penalty

In the image above, the blue self driving car (bottom left) is trying to get to the goal (gold star). It's currently in the correct lane but the green car is going very slowly, so it considers whether it should perform a lane change (LC) or just keep lane (KL). These options are shown as lighter blue vehicles with a dashed outline.
If we want to design a cost function that deals with lane choice, it will be helpful to establish what the relevant variables are. In this case, we can define:

Before we define an actual cost function, let's think of some of the properties we want it to have...
习题 1/3
First, thinking only about delta d: Would we prefer the absolute value of delta d to be big or small?
Big
Small
习题 2/3
Now let's think about how s factors into our considerations of lane cost. Should costs associated with lane change be more important when we are far from the goal (in s coordinate) or close to the goal?
Far
Close
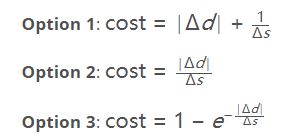
So we want a cost function that penalizes large ∣ and we want that penalty to be bigger when Δ is small.
Furthermore, we want to make sure that the maximum cost of this cost function never exceeds one and that the minimum never goes below zero.
Which of the following proposals meets these criteria?
习题 3/3
Which of the options shown above meet the criteria we want (assume delta s is always positive)?
Option 1
Option 2
Option 3
In this example, we found that the ratio Δs∣Δd∣ was important. If we call that ratio x we can then use that ratio in any function with bounded range. These functions tend to be useful when designing cost functions. These types of functions are called Sigmoid Functions. You can learn more in the Wikipedia article if you're interested.
behavior planning——12.example cost funtion -lane change penalty的更多相关文章
- behavior planning——13. implement a cost function in C++
In the previous quizzes, you designed a cost function to choose a lane when trying to reach a goal i ...
- behavior planning——15.cost function design weightTweaking
Designing cost functions is difficult and getting them all to cooperate to produce reasionable vehic ...
- behavior planning——14.implement a cost function in C++
n most situations, a single cost function will not be sufficient to produce complex vehicle behavior ...
- behavior planning——11 create a cost function speed penalty
A key part of getting transitions to happen when we want them to is the design of reasonable cost ...
- behavior planning——10 behaior planning pseudocode
One way to implement a transition function is by generating rough trajectories for each accessible & ...
- behavior planning——inputs to transition functions
the answer is that we have to pass all of the data into transition function except for the previous ...
- Database Initialization Parameters for Oracle E-Business Suite Release 12 (文档 ID 396009.1)
In This Document Section 1: Common Database Initialization Parameters For All Releases Section 2: Re ...
- Database Initialization Parameters for Oracle E-Business Suite Release 12
In This Document Section 1: Common Database Initialization Parameters For All Releases Section 2: Re ...
- Goal Oriented Action Planning for a Smarter AI
Goal Oriented Action Planning for a Smarter AI by Brent Owens23 Apr 2014 Goal Oriented Action Planni ...
随机推荐
- Python学习(二) 基础语法之初看python
Python 标识符 略 Python保留字符 一大堆,说了未必记得住,编码过程中慢慢去记住. 行和缩进 这个要说一下,学习Python与其他语言最大的区别就是,Python的代码块不使用大括号({} ...
- Lab2 内存管理(实现细节)
lab2 中的变动 bootloader 的入口发生了改变 bootloader不像lab1那样,直接调用kern_init函数,而是先调用位于lab2/kern/init/entry.S中的kern ...
- <a>标签操作
1.点击后onclick事件失效,变灰,不可用 onclick(this); //事件传递this对象 function viewMm(obj) { $(obj).removeAttr("o ...
- Angular js 具体应用(一)
1,首先引用Angular 百度静态资源库搜索Angular 复制链接,在HTML中嵌入script 最好写在正文下面 <script type="text/javascript& ...
- Laravel 某个字段更新失败的原因
明明有这个title, 但是却始终更新不成功 原因是模型这里设置了可以更新的字段,所以直接用Db::table更新会成功
- C#中抽象方法与虚方法的区别(转)
C#中抽象方法与虚方法的区别 一.抽象方法:只在抽象类中定义,方法修饰符不能使用private,virtual,static. 抽象方法如下示: public abstract class Peo ...
- 详解php中空字符串和0之间的关系
$_x=$row["x"];$_y=$row["y"];if(isset($_x) && isset($_y)){if($row["y ...
- uml设计之多重性
---------------------------------------------------------------------------------------------------- ...
- jQuery左右循环滚动图片特效
在线演示 本地下载
- iOS从零开始 Code Review
http://www.cocoachina.com/ios/20151117/14208.html 这篇帖子不是通篇介绍Code Review的方法论, 而是前大段记录了我们团队怎么从没有这个习惯到每 ...