pointcnn
这篇论文先举例子解释了为什么卷积无法直接应用在点云数据上。
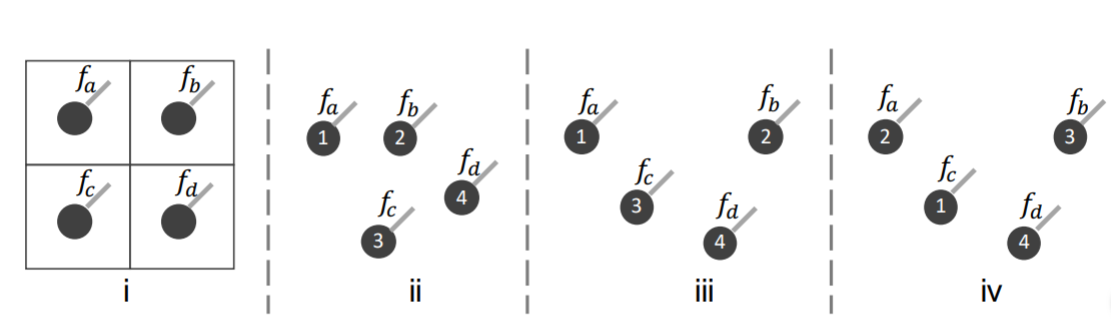
如图1, 传统的卷积是作用在2维图像数据上。图像中每个像素的顺序是固定的,也就是说数据是结构化存储的。直接使用conv2d就能从这种潜在的空间结构中获取信息。
而点云数据是点集,如果直接使用卷积会出现图中234多种情况
若直接使用卷积,则f2与f3的计算结果是相等的,但是从图中可知,23显示不同,这说明卷积无法获得点的空间信息
而f3与f4的计算结果不等,但是图3与图4是相同的点集,必须得到相同的计算结果才合理,这说明卷积无法适应点集的N!种排列。
在其他论文里,为了适应点云数据的这两种的特点采取的方式有体素化、3DCNN及PointNet提的对称操作(symmetric,这个翻译是我自己译的)
版权声明:本文为CSDN博主「Link2Link」的原创文章,遵循 CC 4.0 BY-SA 版权协议,转载请附上原文出处链接及本声明。
原文链接:https://blog.csdn.net/qq_15602569/article/details/79560614
卷积神经网络(Conv)能够很好利用原始数据的在空间上的局部相关性(Spatially-local correlation),这也正是卷积神经网络在各种分割或者分类任务中取得成功的关键。正是如此,作者设想是否能效仿卷积神经网络来很好的利用点云(Point Cloud)的空间上的局部相关性,这将在点云分割和分类上取得很大的成功。所以这篇文章的重点就在于怎么利用这种相关性。
版权声明:本文为CSDN博主「JMU-HSF」的原创文章,遵循 CC 4.0 BY-SA 版权协议,转载请附上原文出处链接及本声明。
原文链接:https://blog.csdn.net/weixin_42956785/article/details/86586513
首先,根据采样得到的中心点,将全局坐标变为局部坐标,相当于分区。(点的数量如何确定?)
o 利用MLP将每个点变换到高维空间(一维卷积),得到F-sigma
o Concat特征F(输入的每个点的附加特征,比如color或者normal)和F-sigma,得到新的特征F*
o 对每个局部区域中的点使用MLP,得到变换矩阵X。这里可以注意一下,得到变换矩阵X的过程,输入是P'(一组坐标点),输出是变换矩阵X。文中的消除实验表明,X变换的确是有效果的
o 对特征F*使用X进行变换后,在进行传统的卷积(1维)。作者是希望通过X变换,把特征F*变成空间相关,也就是希望矩阵中相邻的在空间中也相邻,这样就可以像图像一样卷积了。
作者:摸鱼家
链接:https://zhuanlan.zhihu.com/p/89752154
来源:知乎
著作权归作者所有。商业转载请联系作者获得授权,非商业转载请注明出处。
https://blog.csdn.net/qq_33278989/article/details/80047252
pointcnn的更多相关文章
- PointCNN 论文翻译解析
1. 前言 卷积神经网络在二维图像的应用已经较为成熟了,但 CNN 在三维空间上,尤其是点云这种无序集的应用现在研究得尤其少.山东大学近日公布的一项研究提出的 PointCNN 可以让 CNN 在点云 ...
- 论文笔记:(NIPS2018)PointCNN: Convolution On X-Transformed Points
目录 摘要 一.2D卷积应用在点云上存在的问题 二.解决的方法 2.1 idea 2.2 X-conv算子 2.3 分层卷积 三.实验 3.1分类和分割 3.2消融实验.可视化和模型复杂度 总结 仍存 ...
- 3D点云的深度学习
使用卷积神经网络(CNN)架构的深度学习(DL)现在是解决图像分类任务的标准解决方法.但是将此用于处理3D数据时,问题变得更加复杂.首先,可以使用各种结构来表示3D数据,所述结构包括: 1 体素网格 ...
- 转载:点云上实时三维目标检测的欧拉区域方案 ----Complex-YOLO
感觉是机器翻译,好多地方不通顺,凑合看看 原文名称:Complex-YOLO: An Euler-Region-Proposal for Real-time 3D Object Detection ...
- CVPR2020:4D点云语义分割网络(SpSequenceNet)
CVPR2020:4D点云语义分割网络(SpSequenceNet) SpSequenceNet: Semantic Segmentation Network on 4D Point Clouds 论 ...
- CVPR2020:基于自适应采样的非局部神经网络鲁棒点云处理(PointASNL)
CVPR2020:基于自适应采样的非局部神经网络鲁棒点云处理(PointASNL) PointASNL: Robust Point Clouds Processing Using Nonlocal N ...
- CVPR2020:三维点云无监督表示学习的全局局部双向推理
CVPR2020:三维点云无监督表示学习的全局局部双向推理 Global-Local Bidirectional Reasoning for Unsupervised Representation L ...
- 论文笔记:(2021CVPR)PAConv: Position Adaptive Convolution with Dynamic Kernel Assembling on Point Clouds
目录 摘要 1.引言 2.相关工作 将点云映射到常规二维或三维栅格(体素) 基于MLPs的点表示学习 基于点卷积的点表示学习 动态卷积和条件卷积 3.方法 3.1 回顾 3.2 动态内核组装 Weig ...
- 论文笔记:(2019)GAPNet: Graph Attention based Point Neural Network for Exploiting Local Feature of Point Cloud
目录 摘要 一.引言 二.相关工作 基于体素网格的特征学习 直接从非结构化点云中学习特征 从多视图模型中学习特征 几何深度学习的学习特征 三.GAPNet架构 3.1 GAPLayer 局部结构表示 ...
随机推荐
- 整理几个经常在H5移动端开发遇到的东西。
本篇主要是我个人的学习分享. 1.弹出数字键盘 <!-- 有“#” “*” 符号输入 --> <input type="tel"> <!-- 纯数字 ...
- C++ 标准库,可变参数模板。可变参数数量,可变参数类型【转】
#include <iostream> // 可变模板参数 // 此例:可以构造可变数量,可变类型的函数输入. // 摘自:https://www.cnblogs.com/qicosmos ...
- Java流程控制之顺序结构
概述 在一个程序执行的过程中,各条语句的执行顺序对程序的结果是有直接影响的.也就是说,程序的流程对运行结果有直接的影响.所以,我们必须清楚每条语句的执行流程.而且,很多时候我们要通过控制语句的执行顺序 ...
- POJ 1724 (分层图最短路)
### POJ 1724 题目链接 ### 题目大意: 给你 N 个点 ,M 条有向路,走每条路需要花费 C 元,这段路的长度为 L . 给你 K 元,问你能否从 1 走到 N 点且花费不超过 K 元 ...
- 易优CMS:arcview基础用法
[基础用法] 名称:arcview 功能:获取单条文档数据 语法: {eyou:arcview aid='文档ID'} <a href="{$field.arcurl}"&g ...
- 浏览器记住密码的自动填充Input问题完美解决方案
1.input 前from和input占位隐藏 <form style="width:0;height:0;display:none;"> <input type ...
- visdom 简单使用
 官方网址: https://github.com/facebookresearch/visdom 入门教程: http://www.ainoobtech.com/pytorch/pytorch-v ...
- [反汇编] 获取上一个栈帧的ebp
使用代码 lea ecx, [ebp+4+参数长度] 就可以实现. 如下图,理解栈帧的结构,很好理解. 虽然也是 push param的,但这部分在恢复时被调用函数会恢复的,因此这并不算esp的值. ...
- MySQL EXPLAIN 语句
对于 MySQL 在执行时来说,EXPLAIN 功能上与 DESCRIBE 一样.实际运用中,后者多用来获取表的信息,而前者多用于展示 MySQL 会如何执行 SQL 语句(Obtaining Exe ...
- XAML属性和事件
1.元素属性 XAML是一种声明性语言,XAML编译器会为每一个标签创建一个与之对应的对象.对象创建出来之后要对它的属性进行必要的初始化之后才有使用意义.因为XAML语言不能写程序运行逻辑,所以一份X ...