Opencv 分水岭分割图片
#include <iostream>
#include <opencv2/opencv.hpp>
using namespace std;
using namespace cv;
Mat img1, img2, img3, img4, img5,img6,img_result, img_gray1, img_gray2, img_gray3, img_canny1,img_binary1, img_dist1,kernel_1,kernel_2,img_laplance,img_sharp;
char win1[] = "window1";
char win2[] = "window2";
char win3[] = "window3";
char win4[] = "window4";
char win5[] = "window5";
char win6[] = "window6";
char win7[] = "window7";
int thread_value = 100;
int max_value = 255;
RNG rng1(12345);
RNG rng2(1235);
int Demo_Moments();
int Demo_Moments()
{
namedWindow(win1, CV_WINDOW_AUTOSIZE);
namedWindow(win2, CV_WINDOW_AUTOSIZE);
//namedWindow(win3, CV_WINDOW_AUTOSIZE);
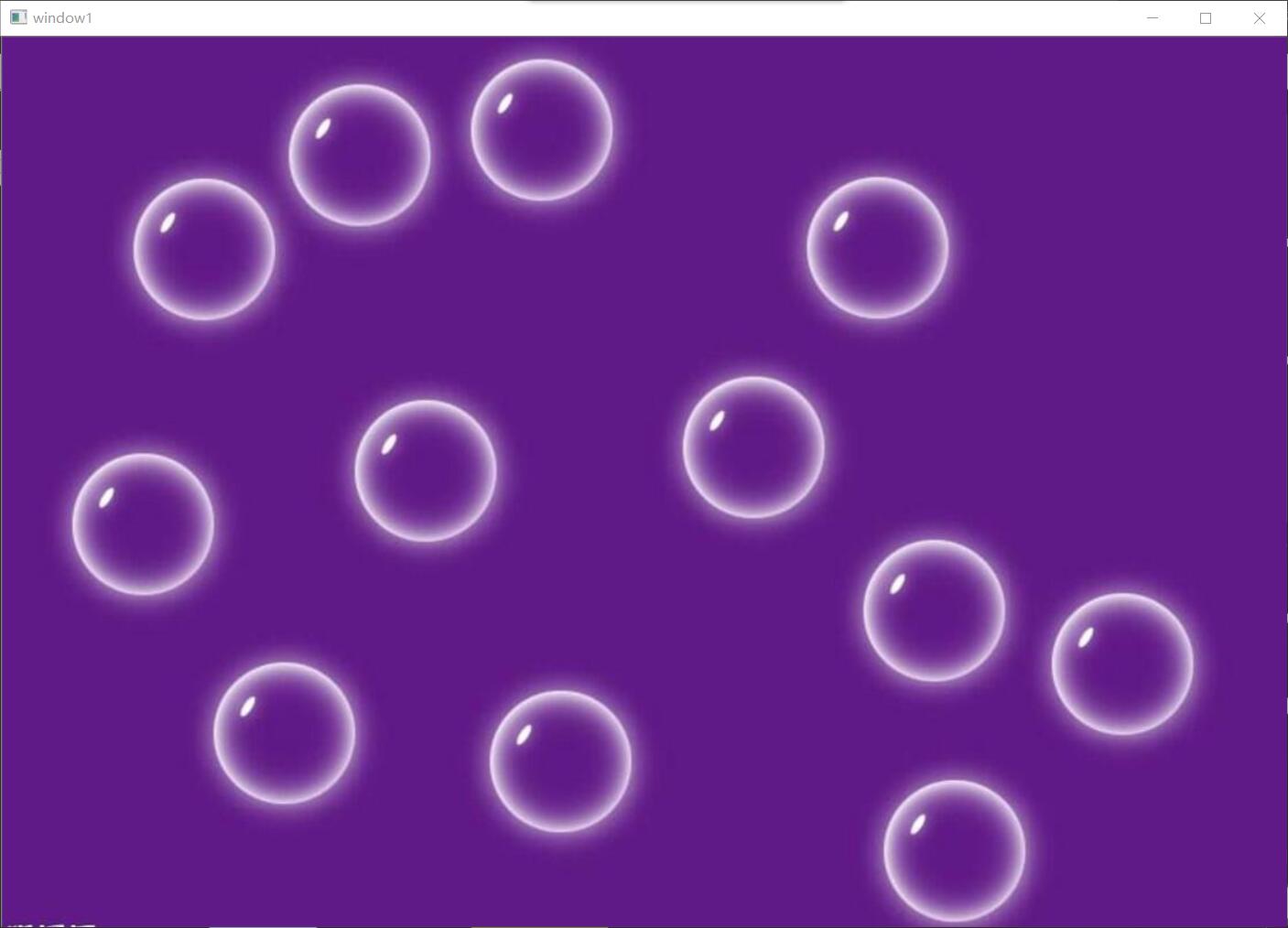
img1 = imread("D://images//24.jpg");
//img2 = imread("D://images//1//p5_1.jpg");
if (img1.empty())
{
cout << "could not load image..." << endl;
return 0;
}
imshow(win1, img1);
img1.copyTo(img2);
//背景色变黑色
for (size_t row =0;row<img2.rows;row++)
{
for (size_t col=0;col<img2.cols;col++)
{
//if (img2.at<Vec3b>(row,col)==Vec3b(135,26,95))
if(img2.at<Vec3b>(row,col)[0]>100 && img2.at<Vec3b>(row,col)[0]<150 && img2.at<Vec3b>(row,col)[1]>18 && img2.at<Vec3b>(row, col)[1] <80 && img2.at<Vec3b>(row,col)[2]>80 && img2.at<Vec3b>(row,col)[2]<170)
{
img2.at<Vec3b>(row, col)[0] = 0;
img2.at<Vec3b>(row, col)[1] = 0;
img2.at<Vec3b>(row, col)[2] = 0;
}
}
}
imshow(win2, img2);
img2.copyTo(img_sharp);
//通过拉普拉斯-锐化边缘
kernel_1 = (Mat_<float>(3,3)<<1,1,1,1,-8,1,1,1,1);
filter2D(img2, img_laplance, CV_32F,kernel_1, Point(-1, -1), 0, BORDER_DEFAULT);
img2.convertTo(img_sharp, CV_32F);
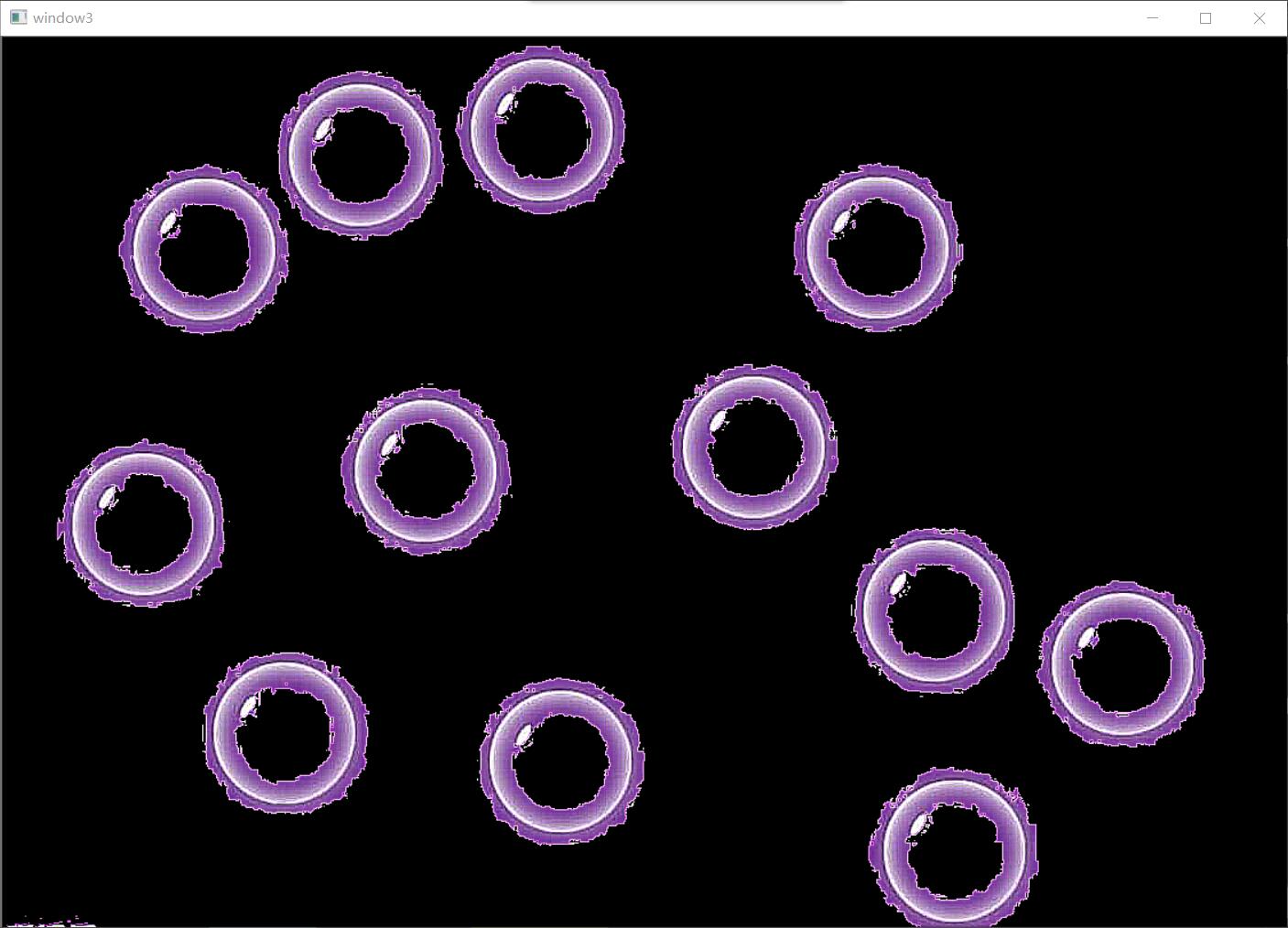
img3 = img_sharp - img_laplance;
img3.convertTo(img3, CV_8UC3);
img_laplance.convertTo(img_laplance, CV_8UC3);
imshow(win3, img3);
//转灰度图
cvtColor(img3, img4, CV_BGR2GRAY);
//二值化
threshold(img4, img_binary1, 40, 255, THRESH_BINARY | THRESH_OTSU);
//距离变换
distanceTransform(img_binary1, img_dist1, DIST_L1, 3, 5);
//归一化处理
normalize(img_dist1, img_dist1, 0, 1, NORM_MINMAX);
//imshow(win4,img_dist1);
//距离变换结果二值化
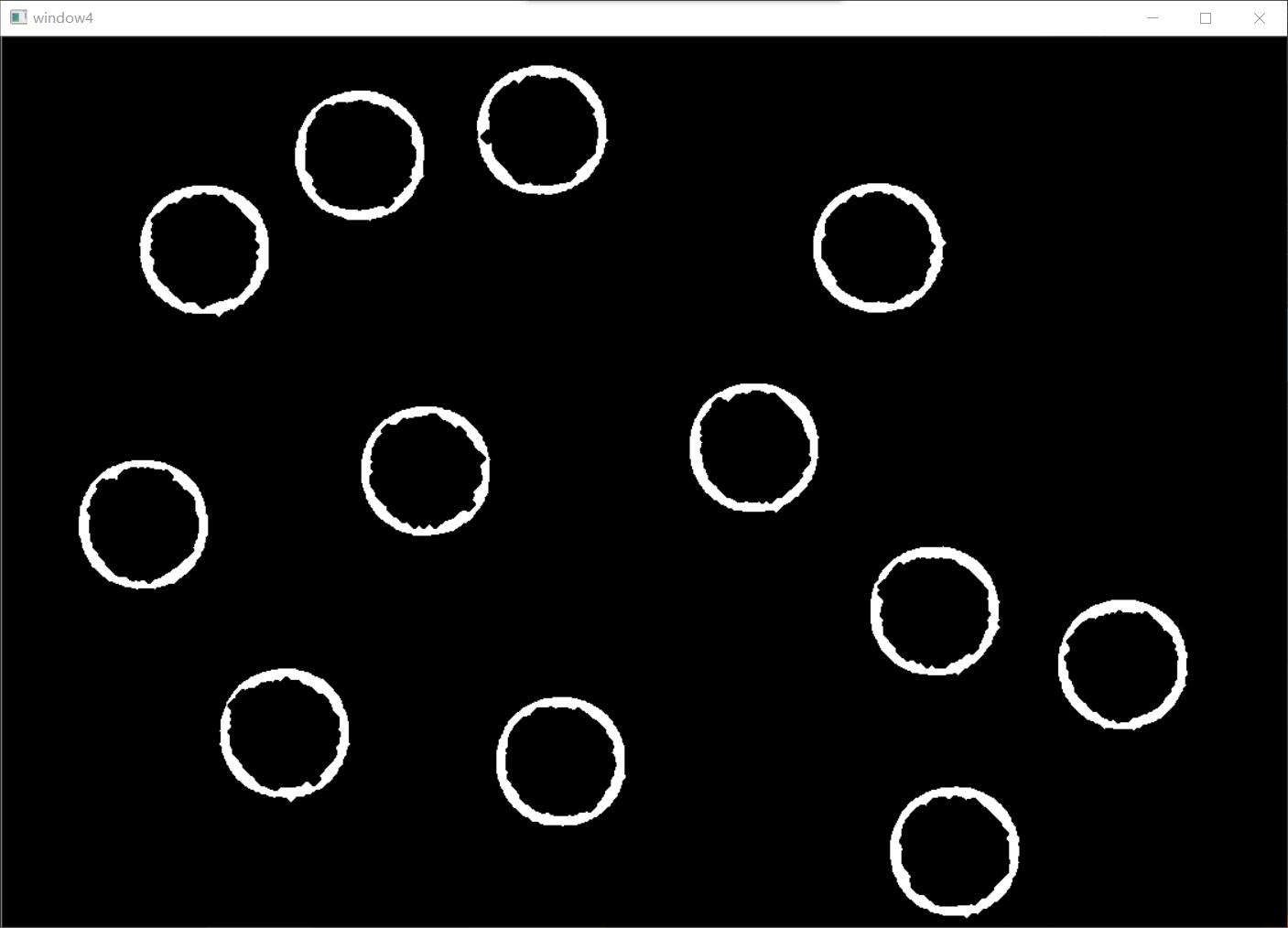
threshold(img_dist1, img_dist1, 0.4, 1, THRESH_BINARY);
//定义腐蚀核大小
kernel_2 = Mat::ones(3,3,CV_8UC1);
//腐蚀二值图
erode(img_dist1, img_dist1, kernel_2, Point(-1, -1));
imshow(win4, img_dist1);
img_dist1.convertTo(img5, CV_8U);
//查找轮廓,标记,得到标记轮廓的图片
vector<vector<Point>> vec_points;
//查找轮廓
findContours(img5, vec_points, RETR_EXTERNAL, CHAIN_APPROX_SIMPLE, Point(0, 0));
//
img6 = Mat::zeros(img1.size(),CV_32SC1);
for (size_t i=0;i<vec_points.size();i++)
{
//drawContours(img6, vec_points, static_cast<int>(i), Scalar(rng1.uniform(0,255), rng1.uniform(0, 255), rng1.uniform(0, 255)),-1);
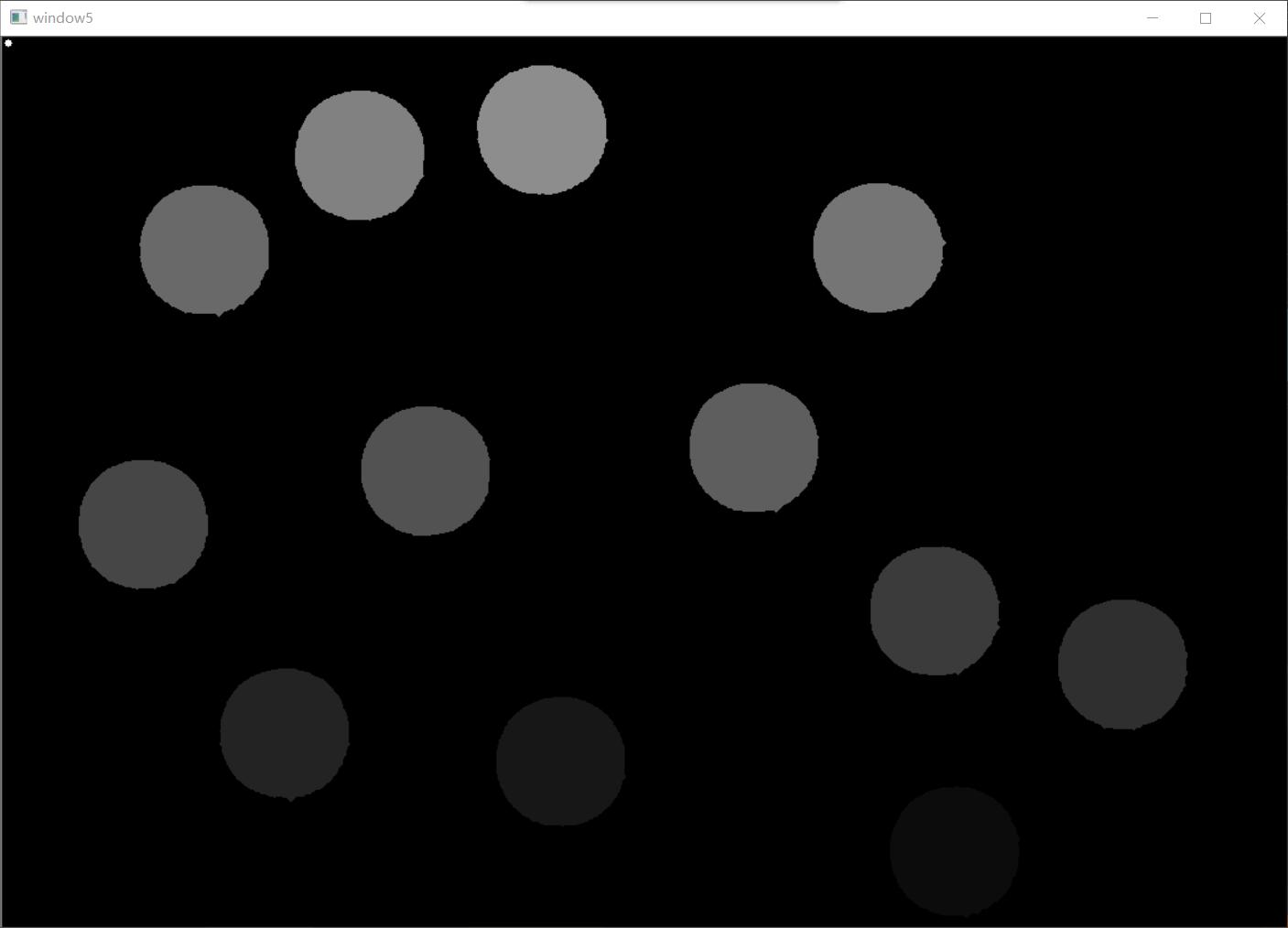
drawContours(img6, vec_points, static_cast<int>(i), Scalar::all(static_cast<int>(i) + 1), -1);
//drawContours(img6, vec_points, static_cast<int>(i), Scalar(theRNG().uniform(0, 255), theRNG().uniform(0, 255), theRNG().uniform(0, 255)), -1);
}
//circle(img6,Point(5,5),3,Scalar(rng1.uniform(0, 255), rng1.uniform(0, 255), rng1.uniform(0, 255)),-1);
//circle(img6, Point(5, 5), 3, Scalar(theRNG().uniform(0, 255), theRNG().uniform(0, 255), theRNG().uniform(0, 255)), -1);
circle(img6,Point(5,5),3,Scalar(255,255,255),-1);
imshow(win5,img6*3000);
//在标记图片的基础上进行分水岭变换
watershed(img1,img6);
Mat img_mark = Mat::zeros(img6.size(),CV_8UC1);
img6.convertTo(img_mark,CV_8UC1);
//取反
bitwise_not(img_mark,img_mark,Mat());
imshow(win6,img_mark);
//着色
vector<Vec3b> vec_colors;
for (size_t j=0;j<vec_points.size();j++)
{
int color_r = rng2.uniform(0,255);
int color_g = rng2.uniform(0, 255);
int color_b = rng2.uniform(0, 255);
//int color_r = theRNG().uniform(10, 255);
//int color_g = theRNG().uniform(10, 255);
//int color_b = theRNG().uniform(10, 255);
vec_colors.push_back(Vec3b((uchar)color_b,(uchar)color_g,(uchar)color_r));
//vec_colors.push_back(Vec3b((uchar)rng1.uniform(0,255), (uchar)rng1.uniform(0, 255), (uchar)rng1.uniform(0, 255)));
}
img_result = Mat::zeros(img6.size(),CV_8UC3);
for (size_t row=0;row<img6.rows;row++)
{
for (size_t col=0;col<img6.cols;col++)
{
int index_1 = img6.at<int>(row,col);
if (index_1>0 && index_1<=static_cast<int>(vec_points.size()))
{
img_result.at<Vec3b>(row, col) = vec_colors[index_1 -1];
}
else
{
img_result.at<Vec3b>(row, col) = Vec3b(0,0,0);
}
}
}
imshow(win7, img_result);
return 0;
}
int main()
{
Demo_Moments();
waitKey(0);
return 0;
}

Opencv 分水岭分割图片的更多相关文章
- 基于标记的分水岭分割算法/OpenCV中距离变换
Opencv分水岭算法——watershed自动图像分割用法 OpenCV距离变换distanceTransform应用 图像分割作为图像识别的基础,在图像处理中占有重要地位,通常需要在进行图像分割算 ...
- 分水岭分割算法(watershed segmentation)的C++实现(法2)
运行环境:ubuntu16.04+Qt+opencv2.4.13.3 watershed.cpp #include "opencv2/imgproc/imgproc.hpp" #i ...
- Opencv分水岭算法——watershed自动图像分割用法
分水岭算法是一种图像区域分割法,在分割的过程中,它会把跟临近像素间的相似性作为重要的参考依据,从而将在空间位置上相近并且灰度值相近的像素点互相连接起来构成一个封闭的轮廓,封闭性是分水岭算法的一个重要特 ...
- opencv::分水岭图像分割
分水岭分割方法原理 (3种) - 基于浸泡理论的分水岭分割方法 (距离) - 基于连通图的方法 - 基于距离变换的方法 图像形态学操作: - 腐蚀与膨胀 - 开闭操作 分水岭算法运用 - 分割粘连对象 ...
- Matlab的标记分水岭分割算法
1 综述 Separating touching objects in an image is one of the more difficult image processing operation ...
- 用CorelDRAW等分分割图片的方法
在CorelDRAW中,想要将图片等分分割可以通过放置容器来实现,根本不需要裁剪工具和辅助线.例如两等分:首先要建立确定等分的份数,建立长方形或正方形.然后把图片放置容器,调整位置,做无缝拼接就可以了 ...
- 怎么样用opencv将彩色图片转化成像素值只有0和255的灰度图?
分类: OpenCV [Q1]怎么样用opencv将彩色图片转化成像素值只有0和255的灰度图? 进行灰度化,IplImage* pImg = cvLoadImage( "C:\\1.b ...
- csharp通过dll调用opencv函数,图片作为参数
[blog 项目实战派]csharp通过dll调用opencv函数,图片作为参数 一直想做着方面的研究,但是因为这个方面的知识过于小众,也是由于自己找资料的能力比较弱,知道今天才找 ...
- TensorFlow与OpenCV,读取图片,进行简单操作并显示
TensorFlow与OpenCV,读取图片,进行简单操作并显示 1 OpenCV读入图片,使用tf.Variable初始化为tensor,加载到tensorflow对图片进行转置操作,然后openc ...
随机推荐
- #define用法
1.简单的define定义 #define MAXTIME 1000 一个简单的MAXTIME就定义好了,它代表1000,如果在程序里面写 if(i<MAXTIME) { // } 编译器在处理 ...
- FastAdmin 的 API 可以分级吗?
FastAdmin 的 API 可以分级吗? 有小伙伴问 FastAdmin 的API 可以分别吗,使用 / 出现错误. Karson 的说明是: 完全支持的,默认是使用.进行分隔的,如果需要/,请开 ...
- Docker生态不会重蹈Hadoop的覆辙
本文原作者是晏东(精灵云Ghostcould创始人),在读到<Docker生态会重蹈Hadoop的覆辙吗?>文章后的个人思考,里面的不少观点也是很不错的. 1.形态上的差异 2013年的时 ...
- Centos下 yum方式安装LAMP
首先安装apache centos可以直接yum安装apache . 配置网易163 yum源 http://www.cnblogs.com/carbon3/p/5635403.html 一. ...
- spring装载配置文件失败报错:org.springframework.beans.factory.xml.XmlBeanDefinitionStoreException
Tomcat容器启动失败,找到 debug日志一看: Context initialization failed org.springframework. beans.factory.xml.XmlB ...
- Java-Runoob-高级教程:Java 实例
ylbtech-Java-Runoob-高级教程:Java 实例 1.返回顶部 1. Java 实例 本章节我们将为大家介绍 Java 常用的实例,通过实例学习我们可以更快的掌握 Java 的应用. ...
- Java 基本数据类型最大值极限和最小值极限
想知道 Java 基本数据类型最大值极限和最小值极限,写个小程序就很容易知道. 测试 Integer, Long, Float 和 Double 的最大值和最小值,代码如下: public stati ...
- day9-数据库操作与Paramiko模块
堡垒机前戏 开发堡垒机之前,先来学习Python的paramiko模块,该模块机遇SSH用于连接远程服务器并执行相关操作 SSHClient 用于连接远程服务器并执行基本命令 基于用户名密码连接: 1 ...
- C++常见错误坑洞
指针没初始化就使用*解引用运算符; 连续delete释放new指针; 使用delete 是否常规普通变量内存; 地址直接复制给制作
- CSS 引用外部字体
@font-face { font-family: W5; src: url('../font/W5.TTF'); } .wallect .wal_body .textBox{ font-family ...