FreeRTOS_软件定时器
FreeRTOS 软件定时器
实验
创建2个任务,start_task、timercontrol_task。
start_stask:创建timercontrol_task任务;创建周期定时器AutoReloadTimer 和单次定时器OneShotTimer;创建二值信号量BinarySemaphore。
BinarySemaphore:接收串口命名,在中断中释放信号,在timercontrol_task中等待信号量,解析命名,通过不同的命令控制周期定时器AutoReloadTimer和单次定时器OneShotTimer的开启和关闭。
AutoReloadTimer 的回调函数会输出运行的次数
OneShotTimer的回电函数会输出运行的次数
任务分配:
//任务优先级
#define START_TASK_PRIO 1
//任务堆栈大小
#define START_STK_SIZE 128
//任务句柄
TaskHandle_t StartTask_Handler;
//任务函数
void start_task(void *pvParameters); //任务优先级
#define TIMERCONTROL_TASK_PRIO 2
//任务堆栈大小
#define TIMERCONTROL_STK_SIZE 50
//任务句柄
TaskHandle_t TimerControlTask_Handler;
//任务函数
void timercontrol_task(void *pvParameters); SemaphoreHandle_t BinarySemaphore_Handle; // 二值信号量句柄 TimerHandle_t AutoReloadTimer_Handle ; // 周期定时器句柄
TimerHandle_t OneShotTimer_Handle; // 单次定时器句柄 void AutoReloadTimerCallback(void); // 周期定时器回调函数
void OneShotTimerCallback(void); // 周期定时器回调函数
main() 函数
int main(void)
{
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_4);//设置系统中断优先级分组4
delay_init(); //延时函数初始化
uart_init(); //初始化串口
LED_Init(); //初始化LED //创建开始任务
xTaskCreate((TaskFunction_t )start_task, //任务函数
(const char* )"start_task", //任务名称
(uint16_t )START_STK_SIZE, //任务堆栈大小
(void* )NULL, //传递给任务函数的参数
(UBaseType_t )START_TASK_PRIO, //任务优先级
(TaskHandle_t* )&StartTask_Handler); //任务句柄
vTaskStartScheduler(); //开启任务调度
}
命令解析相关函数:
// 将字符串中的小写字母转换为大写
// str:要转换的字符串
// len:字符串长度
void LowerToCap(u8 *str,u8 len)
{
u8 i; for(i=;i<len;i++)
{
if((<str[i])&&(str[i]<)) // 小写字母
str[i] = str[i]-; // 转换为大写
}
} // 命令处理函数,将字符串命令转换成命令值
// str:命令
// 返回值:0xFF-命令错误 其他值-命令值
u8 CommandProcess(u8 *str)
{
u8 CommandValue = 0xFF; if(strcmp((char*)str,"KEY1")==) CommandValue = ;
else if(strcmp((char*)str,"KEY2")==) CommandValue = ;
else if(strcmp((char*)str,"KEY3")==) CommandValue = ;
else if(strcmp((char*)str,"KEY4")==) CommandValue = ; return CommandValue;
}
任务函数:
//开始任务任务函数
void start_task(void *pvParameters)
{
taskENTER_CRITICAL(); //进入临界区 // 创建二值信号量
BinarySemaphore_Handle = xSemaphoreCreateBinary(); // 创建二值信号量
if(BinarySemaphore_Handle ==NULL)
{
printf("BinarySemaphore Create Failed!\r\n");
}else{
xSemaphoreGive(BinarySemaphore_Handle); // 释放信号量
} // 创建周期定时器
AutoReloadTimer_Handle = xTimerCreate( (const char *)"AutoReloadTimer",
(TickType_t) ,
(UBaseType_t) pdTRUE,
(void *) ,
(TimerCallbackFunction_t)AutoReloadTimerCallback );
if(AutoReloadTimer_Handle == NULL)
{
printf("AutoReloadTimer Created Failed \r\n");
}else{
printf("AutoReloadTimer Created Success \r\n");
} // 创建单次定时器
OneShotTimer_Handle = xTimerCreate( (const char *)"OneShotTimer",
(TickType_t) ,
(UBaseType_t) pdFALSE,
(void *) ,
(TimerCallbackFunction_t)OneShotTimerCallback );
if(OneShotTimer_Handle == NULL)
{
printf("OneShotTimer Created Failed \r\n");
}else{
printf("OneShotTimer Created Success \r\n");
} //创建TIMECONTRFOL任务
xTaskCreate((TaskFunction_t )timercontrol_task,
(const char* )"timercontrol_task",
(uint16_t )TIMERCONTROL_STK_SIZE,
(void* )NULL,
(UBaseType_t )TIMERCONTROL_TASK_PRIO,
(TaskHandle_t* )&TimerControlTask_Handler); vTaskDelete(StartTask_Handler); //删除开始任务
taskEXIT_CRITICAL(); //退出临界区
} //TIMERCONTROL任务函数
void timercontrol_task(void *pvParameters)
{
u8 len = ;
u8 CommandValue = 0xFF;
u8 CommandStr[USART_REC_LEN];
BaseType_t err; while()
{
xSemaphoreTake( BinarySemaphore_Handle, portMAX_DELAY ); // 死等
len = USART_RX_STA&0x3fff; // 得到此次接收到的数据长度 sprintf((char *)CommandStr,"%s",USART_RX_BUF); // 装载数据
CommandStr[len] = '\0'; // 加上字符串结尾符号
LowerToCap(CommandStr,len); // 将字符串转换为大写
CommandValue = CommandProcess(CommandStr); // 命令解析 if(CommandValue != 0xFF) // 接收到正确的命令
{
switch(CommandValue)
{
case : // 开启周期定时器
err = xTimerStart( AutoReloadTimer_Handle, );
if(err == pdFAIL)
{
printf("AutoReloadTimer Start Failed! \r\n");
}else{
printf("AutoReloadTimer Start Succeed! \r\n");
}
break;
case : // 关闭周期定时器
err = xTimerStop( AutoReloadTimer_Handle, );
if(err == pdFAIL)
{
printf("AutoReloadTimer Stop Failed! \r\n");
}else{
printf("AutoReloadTimer Stop Succeed! \r\n");
}
break;
case : // 开启单次定时器
err = xTimerStart( OneShotTimer_Handle, );
if(err == pdFAIL)
{
printf("OneShotTimer Start Failed! \r\n");
}else{
printf("OneShotTimer Start Succeed! \r\n");
}
break;
case : // 关闭周期定时器
err = xTimerStop( OneShotTimer_Handle, );
if(err == pdFAIL)
{
printf("OneShotTimer Stop Failed! \r\n");
}else{
printf("OneShotTimer Stop Succeed! \r\n");
}
break;
}
}else{
printf("Cmd error!\r\n");
}
USART_RX_STA = ;
}
}
定时器回调函数:
// 周期定时器回调函数
void AutoReloadTimerCallback(void)
{
static u8 count = ; count ++;
printf("AutoReloadTimerCallback running %d timers\r\n",count);
} // 周期定时器回调函数
void OneShotTimerCallback(void)
{
static u8 count = ; count ++;
printf("OneShotTimerCallback running %d timers\r\n",count);
}
串口中断初始化和中断处理函数
u8 USART_RX_BUF[USART_REC_LEN]; //接收缓冲,最大USART_REC_LEN个字节.
//接收状态
//bit15, 接收完成标志
//bit14, 接收到0x0d
//bit13~0, 接收到的有效字节数目
u16 USART_RX_STA=; //接收状态标记 void uart_init(u32 bound){
//GPIO端口设置
GPIO_InitTypeDef GPIO_InitStructure;
USART_InitTypeDef USART_InitStructure;
NVIC_InitTypeDef NVIC_InitStructure; RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1|RCC_APB2Periph_GPIOA, ENABLE); //使能USART1,GPIOA时钟 //USART1_TX GPIOA.9
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9; //PA.9
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //复用推挽输出
GPIO_Init(GPIOA, &GPIO_InitStructure);//初始化GPIOA.9 //USART1_RX GPIOA.10初始化
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10;//PA10
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;//浮空输入
GPIO_Init(GPIOA, &GPIO_InitStructure);//初始化GPIOA.10 //Usart1 NVIC 配置
NVIC_InitStructure.NVIC_IRQChannel = USART1_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority= ;//抢占优先级3
NVIC_InitStructure.NVIC_IRQChannelSubPriority = ; //子优先级3
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //IRQ通道使能
NVIC_Init(&NVIC_InitStructure); //根据指定的参数初始化VIC寄存器 //USART 初始化设置 USART_InitStructure.USART_BaudRate = bound;//串口波特率
USART_InitStructure.USART_WordLength = USART_WordLength_8b;//字长为8位数据格式
USART_InitStructure.USART_StopBits = USART_StopBits_1;//一个停止位
USART_InitStructure.USART_Parity = USART_Parity_No;//无奇偶校验位
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;//无硬件数据流控制
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx; //收发模式 USART_Init(USART1, &USART_InitStructure); //初始化串口1
USART_ITConfig(USART1, USART_IT_RXNE, ENABLE);//开启串口接受中断
USART_Cmd(USART1, ENABLE); //使能串口1
} extern SemaphoreHandle_t BinarySemaphore_Handle; // 二值信号量句柄
void USART1_IRQHandler(void) //串口1中断服务程序
{
u8 Res;
BaseType_t xHigherPriorityTaskWoken = pdFALSE; if(USART_GetITStatus(USART1, USART_IT_RXNE) != RESET) //接收中断(接收到的数据必须是0x0d 0x0a结尾)
{
Res =USART_ReceiveData(USART1); //读取接收到的数据 if((USART_RX_STA&0x8000)==)//接收未完成
{
if(USART_RX_STA&0x4000)//接收到了0x0d
{
if(Res!=0x0a)USART_RX_STA=;//接收错误,重新开始
else USART_RX_STA|=0x8000; //接收完成了
}
else //还没收到0X0D
{
if(Res==0x0d)USART_RX_STA|=0x4000;
else
{
USART_RX_BUF[USART_RX_STA&0X3FFF]=Res ;
USART_RX_STA++;
if(USART_RX_STA>(USART_REC_LEN-))USART_RX_STA=;//接收数据错误,重新开始接收
}
}
}
} if((BinarySemaphore_Handle != NULL) && (USART_RX_STA&0x8000))
{
xSemaphoreGiveFromISR( BinarySemaphore_Handle, &xHigherPriorityTaskWoken ); // 释放互斥信号量
portYIELD_FROM_ISR(xHigherPriorityTaskWoken); // 如果需要进行一次任务切换
} }
#define USART_REC_LEN 20 //定义最大接收字节数 200
#define EN_USART1_RX 1 //使能(1)/禁止(0)串口1接收 extern u8 USART_RX_BUF[USART_REC_LEN]; //接收缓冲,最大USART_REC_LEN个字节.末字节为换行符
注意:串口中断的优先级在FreeRTOS的优先级管理范围内。
运行结果:
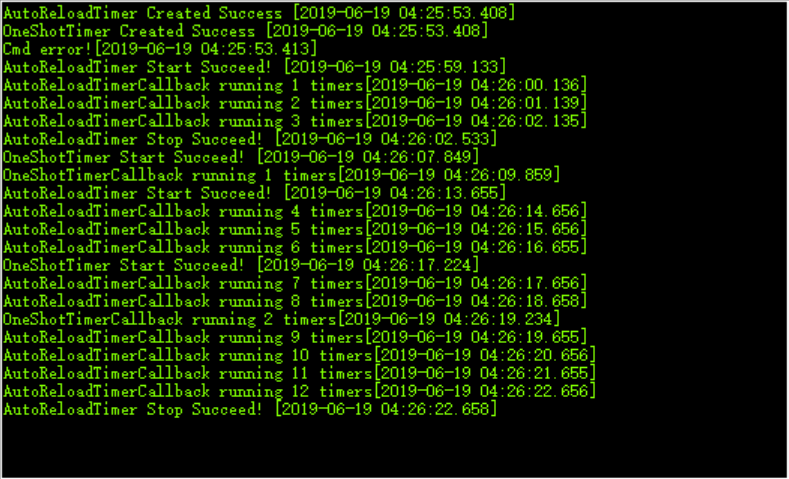
输入KEY1命令,周期定时器开始运行,周期性调用其回调函数,直到输入KEY2命令,停止周期定时器,其回调函数不再被调用。
输入KYE3命令,单次定时器开始运行,调用其回调函数,只调用一次,就不再调用。再次输入KEY3命令,还是只调其回调函数一次。
可以看出,停止单次定时器命令KEY4,可以不存在。
FreeRTOS_软件定时器的更多相关文章
- rt-thread中软件定时器组件超时界限的一点理解
@2019-01-15 [小记] 对 rt-thread 中的软件定时器组件中超时界限的一点理解 rt_thread_timer_entry(void *parameter)函数中if ((next_ ...
- 【iCore4 双核心板_uC/OS-II】例程四:软件定时器
一.实验说明: 一些应用程序执行它们的任务时需要延迟一段特定的时间,因此uC/OS-II为我们提供了一些相应的 延时函数,本例程我们使用软件定时器定时500ms点亮相应的LED实现三色LED循环闪烁. ...
- 6.1-uC/OS-III软件定时器
1.软件定时器是 uC/OS 操作系统的一个内核对象,软件定时器是基于时钟节拍和系统管理创建的软件性定时器,理论上可以创建无限多个,但精准度肯定比硬件定时稍逊一筹. 2.软件定时器启动之后是由软件定时 ...
- 6.0-uC/OS-III软件定时器管理
1.软件定时器管理 uC/OS-III提供了软件定时器服务(相关代码在OS_TMR.C中).当设置OS_CFG.H中的OS_CFG_TMR_EN为1时软件定时器服务被使能. 2.uC/OS-III 定 ...
- 【STM32H7教程】第22章 STM32H7的SysTick实现多组软件定时器
完整教程下载地址:http://forum.armfly.com/forum.php?mod=viewthread&tid=86980 第22章 STM32H7的SysTick实现 ...
- uC/OS-III 软件定时器(三)
软件定时器是uC/OS 操作系统的一个内核对象,软件定时器是基于时钟节拍和系统管理创建的软件性定时器,理论上可以创建无限多个,操作简单,但精准度肯定比硬件定时稍逊一筹. 原理和实现过程 要用到的函数: ...
- 【TencentOS tiny】深度源码分析(8)——软件定时器
软件定时器的基本概念 TencentOS tiny 的软件定时器是由操作系统提供的一类系统接口,它构建在硬件定时器基础之上,使系统能够提供不受硬件定时器资源限制的定时器服务,本质上软件定时器的使用相当 ...
- liteos软件定时器(十)
1 概述 1.1 基本概念 软件定时器,是基于系统Tick时钟中断且由软件来模拟的定时器,当经过设定的Tick时钟计数值后会触发用户定义的回调函数.定时精度与系统Tick时钟的周期有关. 硬件定时器受 ...
- 分享一个简单易用的软件定时器模块(MultiTimer)——基于keil+stm32f103zet+hal库(裸机实现)
公众号上看到一个比较好的一个github项目:https://github.com/0x1abin/MultiTimer 今天看了看,简单的,就移植了- 且看文档的说明, ============== ...
随机推荐
- 打通Java与MySQL的桥梁——jdbc
实现的基本步骤: 1.加载驱动程序: Class.forName("com.mysql.jdbc.Driver"); 2.获得数据可连接: private static final ...
- ASP.NET对象
ASP.NET有五个基本的常用对象 一张图胜过前言万语 ASP.NET对象重头戏 对象名 解释 属性 方法 例子 Request 获取客户端数据信息 1.UserAgent:用来获取客户端浏览器 ...
- Mysql-5-数据表的基本操作
1.创建表:之前需要use database database_name 然后create table 表名(): 例:创建员工表tb_employee1,结构如下表所示 字段名称 数据类型 备注 i ...
- [Xcode 实际操作]五、使用表格-(2)设置UITableView单元格高度
目录:[Swift]Xcode实际操作 本文将演示如何制作一个自定义行高的表格视图 在项目导航区,打开视图控制器的代码文件[ViewController.swift] import UIKit //首 ...
- Idea提示没有符号类错误解决
将提示没有符号类的文件打开,右键单独编译一次,再重新打包即可解决
- List<Object> 使用Linq
List<Asset> bdList = allAsset.Where(m => m.Owner.Depts == view.DeptName).ToList(); var quer ...
- 02.Spring Ioc 容器 - 创建
基本概念 Spring IoC 容器负责 Bean 创建.以及其生命周期的管理等.想要使用 IoC容器的前提是创建该容器. 创建 Spring IoC 容器大致有两种: 在应用程序中创建. 在 WEB ...
- [原创]Nodejs 远程执行linux shell
分享几个基于nodejs远程执行linux shell的函数 参数说明: ips - 一个存有IP地址的数组对象 /** * Created by kevalin on 2015/4/27. */ v ...
- Linux网络编程函数
1. Server端-socket/bind/listen/accept/read socket(AF_INET, SOCK_STREAM, 0); //指定端口,内核将端口上的数据转发给该socke ...
- jsp内置对象和el表达式内置对象误区
未经允许禁止转载... jsp九大内置对象 EL表达式隐含的11个对象 隐含对象名称 描 述 pageContext 对应于JSP页面中的pageContext对象(注意:取的是pageC ...