Ceres Solver: 高效的非线性优化库(二)实战篇
Ceres Solver: 高效的非线性优化库(二)实战篇
接上篇: Ceres Solver: 高效的非线性优化库(一)
如何求导
Ceres Solver提供了一种自动求导的方案,上一篇我们已经看到。
但有些情况,不能使用自动求导方案。另外两种方案:解析求导和数值求导。
1. 解析求导
有些情况无法定义模板代价函数。比如残差函数是库函数,你无法知道。此时我们可以构建一个NumericDiffCostFunction,例如$$f(x)=10-x$$.上面的例子变成
struct NumericDiffCostFunctor {
bool operator()(const double* const x, double* residual) const {
residual[0] = 10.0 - x[0];
return true;
}};
加入Problem中。
CostFunction* cost_function =
new NumericDiffCostFunction<NumericDiffCostFunctor, ceres::CENTRAL, 1, 1>(
new NumericDiffCostFunctor);
problem.AddResidualBlock(cost_function, NULL, &x);
同自动求导的区别
CostFunction* cost_function =
new AutoDiffCostFunction<CostFunctor, 1, 1>(new CostFunctor);problem.AddResidualBlock(cost_function, NULL, &x);
一般而言,我们推荐自动求导,不适用数值求导。C++模板让自动求导非常高效,但解析求导速度很慢,且容易造成数值错误,收敛较慢。
2. 数值求导
有些情况,自动求导并不能使用。比如,有时候使用最终形势比自动求导的链式法则(chain rule)更方便。
这种情况下,需要提供残差和雅克比值。为此,我们需要定义一个CostFunction的子类(如果你知道残差在编译时的大小,可定义SizedCostFunction的子类)。下面依旧是\(f(x) = 10 - x\)的例子。
class QuadraticCostFunction : public ceres::SizedCostFunction<1, 1> {
public:
virtual ~QuadraticCostFunction() {}
virtual bool Evaluate(double const* const* parameters,
double* residuals,
double** jacobians) const {
const double x = parameters[0][0];
residuals[0] = 10 - x;
// Compute the Jacobian if asked for.
if (jacobians != NULL && jacobians[0] != NULL) {
jacobians[0][0] = -1;
}
return true;
}};
SimpleCostFunction::Evaluate是输入参数,residuals是jacobian的输出。Jacobians是可选项,Evaluate用来检测它是否非空,否则帮它填充好。此示例下残差是线性的,雅克比是固定值。
这个方案是比较繁琐的。除非有必要,推荐使用AutoDiffCostFunction或NumericDiffCostFunction来创建。
3. 更多关于求导的内容
求导是目前Ceres Solver最复杂的内容,有时候用户需要根据情况旋转更方便的方案。本节只是大致介绍求导方案。熟悉Numeric和Auto之后,推荐了解DynamicAuto,CostFunctionToFunctor,NumericDiffFunctor和ConditionedCostFunction。
实战之Powell’s Function(一个稍微复杂点的例子)
考虑变量$$x = \left[x_1, x_2, x_3, x_4 \right]$$和
f_1(x) &= x_1 + 10x_2 \\
f_2(x) &= \sqrt{5} (x_3 - x_4)\\
f_3(x) &= (x_2 - 2x_3)^2\\
f_4(x) &= \sqrt{10} (x_1 - x_4)^2\\
F(x) &= \left[f_1(x),\ f_2(x),\ f_3(x),\ f_4(x) \right]
\end{align}\end{split}
\]
$ F(x) \(是4个参数的函数,有4个残差,我们希望找到一个最小化\)\frac{1}{2}|F(x)|^2\(的变量\)x\(。第一步,定义一个衡量目标函数的算子。对于\)f_4(x_1, x_4)$:
struct F4 {
template <typename T>
bool operator()(const T* const x1, const T* const x4, T* residual) const {
residual[0] = T(sqrt(10.0)) * (x1[0] - x4[0]) * (x1[0] - x4[0]);
return true;
}
};
类似的我们可以定义F1,F2,F3。利用这些算子,优化问题可使用下面的方法解决:
double x1 = 3.0; double x2 = -1.0; double x3 = 0.0; double x4 = 1.0;
Problem problem;
// Add residual terms to the problem using the using the autodiff
// wrapper to get the derivatives automatically.
problem.AddResidualBlock(
new AutoDiffCostFunction<F1, 1, 1, 1>(new F1), NULL, &x1, &x2);
problem.AddResidualBlock(
new AutoDiffCostFunction<F2, 1, 1, 1>(new F2), NULL, &x3, &x4);
problem.AddResidualBlock(
new AutoDiffCostFunction<F3, 1, 1, 1>(new F3), NULL, &x2, &x3)
problem.AddResidualBlock(
new AutoDiffCostFunction<F4, 1, 1, 1>(new F4), NULL, &x1, &x4);
对于每个ResidualBlock仅仅依赖2个变量。运行examples/powell.cc可以得到相应优化结果。
Initial x1 = 3, x2 = -1, x3 = 0, x4 = 1
iter cost cost_change |gradient| |step| tr_ratio tr_radius ls_iter iter_time total_time
0 1.075000e+02 0.00e+00 1.55e+02 0.00e+00 0.00e+00 1.00e+04 0 4.95e-04 2.30e-03
1 5.036190e+00 1.02e+02 2.00e+01 2.16e+00 9.53e-01 3.00e+04 1 4.39e-05 2.40e-03
2 3.148168e-01 4.72e+00 2.50e+00 6.23e-01 9.37e-01 9.00e+04 1 9.06e-06 2.43e-03
3 1.967760e-02 2.95e-01 3.13e-01 3.08e-01 9.37e-01 2.70e+05 1 8.11e-06 2.45e-03
4 1.229900e-03 1.84e-02 3.91e-02 1.54e-01 9.37e-01 8.10e+05 1 6.91e-06 2.48e-03
5 7.687123e-05 1.15e-03 4.89e-03 7.69e-02 9.37e-01 2.43e+06 1 7.87e-06 2.50e-03
6 4.804625e-06 7.21e-05 6.11e-04 3.85e-02 9.37e-01 7.29e+06 1 5.96e-06 2.52e-03
7 3.003028e-07 4.50e-06 7.64e-05 1.92e-02 9.37e-01 2.19e+07 1 5.96e-06 2.55e-03
8 1.877006e-08 2.82e-07 9.54e-06 9.62e-03 9.37e-01 6.56e+07 1 5.96e-06 2.57e-03
9 1.173223e-09 1.76e-08 1.19e-06 4.81e-03 9.37e-01 1.97e+08 1 7.87e-06 2.60e-03
10 7.333425e-11 1.10e-09 1.49e-07 2.40e-03 9.37e-01 5.90e+08 1 6.20e-06 2.63e-03
11 4.584044e-12 6.88e-11 1.86e-08 1.20e-03 9.37e-01 1.77e+09 1 6.91e-06 2.65e-03
12 2.865573e-13 4.30e-12 2.33e-09 6.02e-04 9.37e-01 5.31e+09 1 5.96e-06 2.67e-03
13 1.791438e-14 2.69e-13 2.91e-10 3.01e-04 9.37e-01 1.59e+10 1 7.15e-06 2.69e-03
Ceres Solver v1.12.0 Solve Report
----------------------------------
Original Reduced
Parameter blocks 4 4
Parameters 4 4
Residual blocks 4 4
Residual 4 4
Minimizer TRUST_REGION
Dense linear algebra library EIGEN
Trust region strategy LEVENBERG_MARQUARDT
Given Used
Linear solver DENSE_QR DENSE_QR
Threads 1 1
Linear solver threads 1 1
Cost:
Initial 1.075000e+02
Final 1.791438e-14
Change 1.075000e+02
Minimizer iterations 14
Successful steps 14
Unsuccessful steps 0
Time (in seconds):
Preprocessor 0.002
Residual evaluation 0.000
Jacobian evaluation 0.000
Linear solver 0.000
Minimizer 0.001
Postprocessor 0.000
Total 0.005
Termination: CONVERGENCE (Gradient tolerance reached. Gradient max norm: 3.642190e-11 <= 1.000000e-10)
Final x1 = 0.000292189, x2 = -2.92189e-05, x3 = 4.79511e-05, x4 = 4.79511e-05
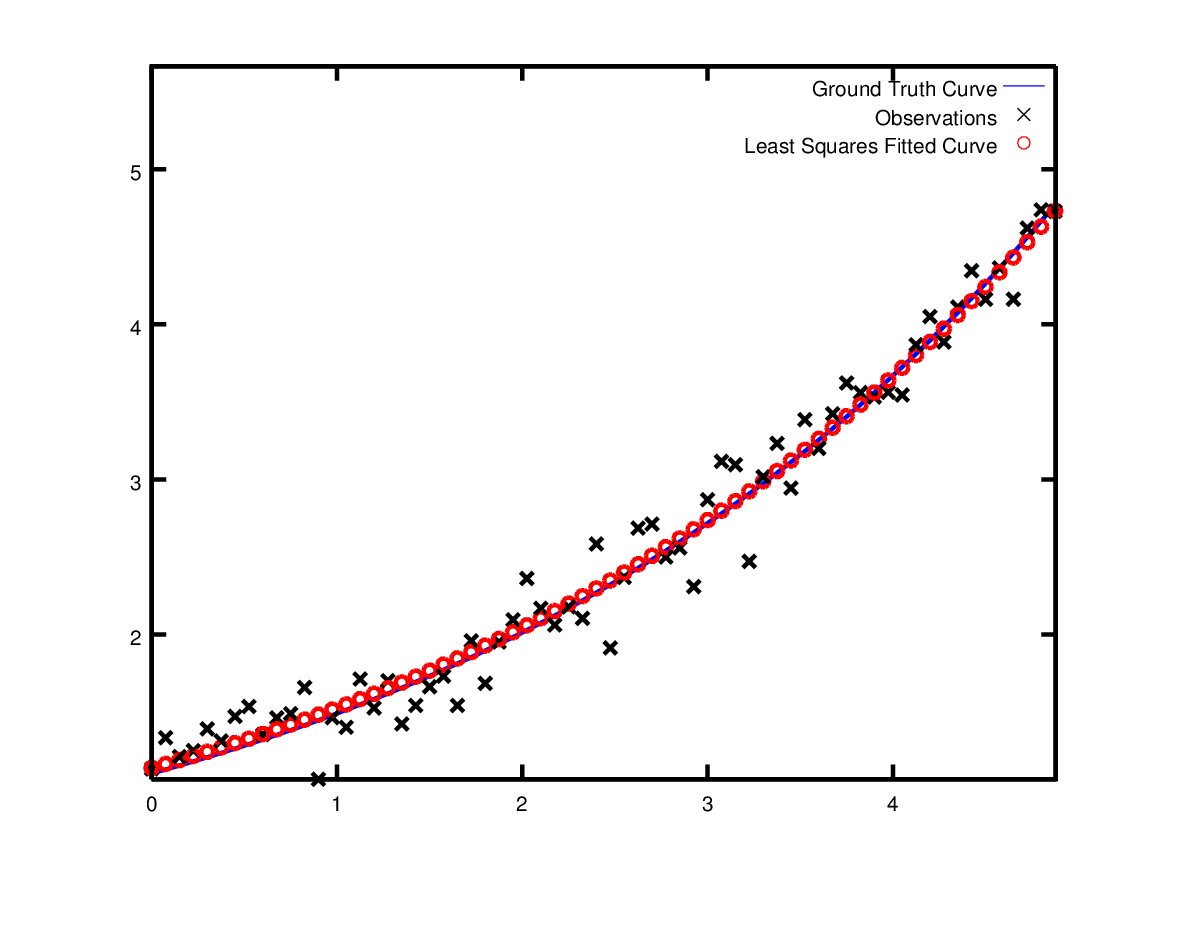
实战之曲线拟合
之前的例子都是不依赖数据的简单例子。非线性最小二乘法分析最初的目标是把数据拟合称曲线。现在考虑曲线拟合的数据,公式为\(y =
e^{0.3x + 0.1}\)。对其进行采样并加入方差为\(\sigma = 0.2\)高斯噪声。我们希望拟合曲线
\]
首先我们定义一个模板对象来评估残差。
struct ExponentialResidual {
ExponentialResidual(double x, double y)
: x_(x), y_(y) {}
template <typename T>
bool operator()(const T* const m, const T* const c, T* residual) const {
residual[0] = T(y_) - exp(m[0] * T(x_) + c[0]);
return true;
}
private:
// Observations for a sample.
const double x_;
const double y_;
};
假设我们有观测数据\(2n\)大小,构建如下问题。
double m = 0.0;
double c = 0.0;
Problem problem;
for (int i = 0; i < kNumObservations; ++i) {
CostFunction* cost_function =
new AutoDiffCostFunction<ExponentialResidual, 1, 1, 1>(
new ExponentialResidual(data[2 * i], data[2 * i + 1]));
problem.AddResidualBlock(cost_function, NULL, &m, &c);
}
变异运行examples/curve_fitting.cc得到相应结果。
iter cost cost_change |gradient| |step| tr_ratio tr_radius ls_iter iter_time total_time
0 1.211734e+02 0.00e+00 3.61e+02 0.00e+00 0.00e+00 1.00e+04 0 5.34e-04 2.56e-03
1 1.211734e+02 -2.21e+03 0.00e+00 7.52e-01 -1.87e+01 5.00e+03 1 4.29e-05 3.25e-03
2 1.211734e+02 -2.21e+03 0.00e+00 7.51e-01 -1.86e+01 1.25e+03 1 1.10e-05 3.28e-03
3 1.211734e+02 -2.19e+03 0.00e+00 7.48e-01 -1.85e+01 1.56e+02 1 1.41e-05 3.31e-03
4 1.211734e+02 -2.02e+03 0.00e+00 7.22e-01 -1.70e+01 9.77e+00 1 1.00e-05 3.34e-03
5 1.211734e+02 -7.34e+02 0.00e+00 5.78e-01 -6.32e+00 3.05e-01 1 1.00e-05 3.36e-03
6 3.306595e+01 8.81e+01 4.10e+02 3.18e-01 1.37e+00 9.16e-01 1 2.79e-05 3.41e-03
7 6.426770e+00 2.66e+01 1.81e+02 1.29e-01 1.10e+00 2.75e+00 1 2.10e-05 3.45e-03
8 3.344546e+00 3.08e+00 5.51e+01 3.05e-02 1.03e+00 8.24e+00 1 2.10e-05 3.48e-03
9 1.987485e+00 1.36e+00 2.33e+01 8.87e-02 9.94e-01 2.47e+01 1 2.10e-05 3.52e-03
10 1.211585e+00 7.76e-01 8.22e+00 1.05e-01 9.89e-01 7.42e+01 1 2.10e-05 3.56e-03
11 1.063265e+00 1.48e-01 1.44e+00 6.06e-02 9.97e-01 2.22e+02 1 2.60e-05 3.61e-03
12 1.056795e+00 6.47e-03 1.18e-01 1.47e-02 1.00e+00 6.67e+02 1 2.10e-05 3.64e-03
13 1.056751e+00 4.39e-05 3.79e-03 1.28e-03 1.00e+00 2.00e+03 1 2.10e-05 3.68e-03
Ceres Solver Report: Iterations: 13, Initial cost: 1.211734e+02, Final cost: 1.056751e+00, Termination: CONVERGENCE
Initial m: 0 c: 0
Final m: 0.291861 c: 0.131439
使用初值\(m=0, c=0\), 初始目标函数值为\(121.173\)。Ceres计算得到\(m=0.291, c=0.131\).目标函数值为\(1.056\)。但这同原始模型不一样,但也是合理的。通过带噪声的数据恢复模型会得到一定的偏差。实际上,即使使用原始模型数据,偏差更大。
实战之曲线鲁棒拟合
现在假设数据有一些我们并不在模型的值。如果使用这些做拟合,模型会离真实值有所偏差。如下图。
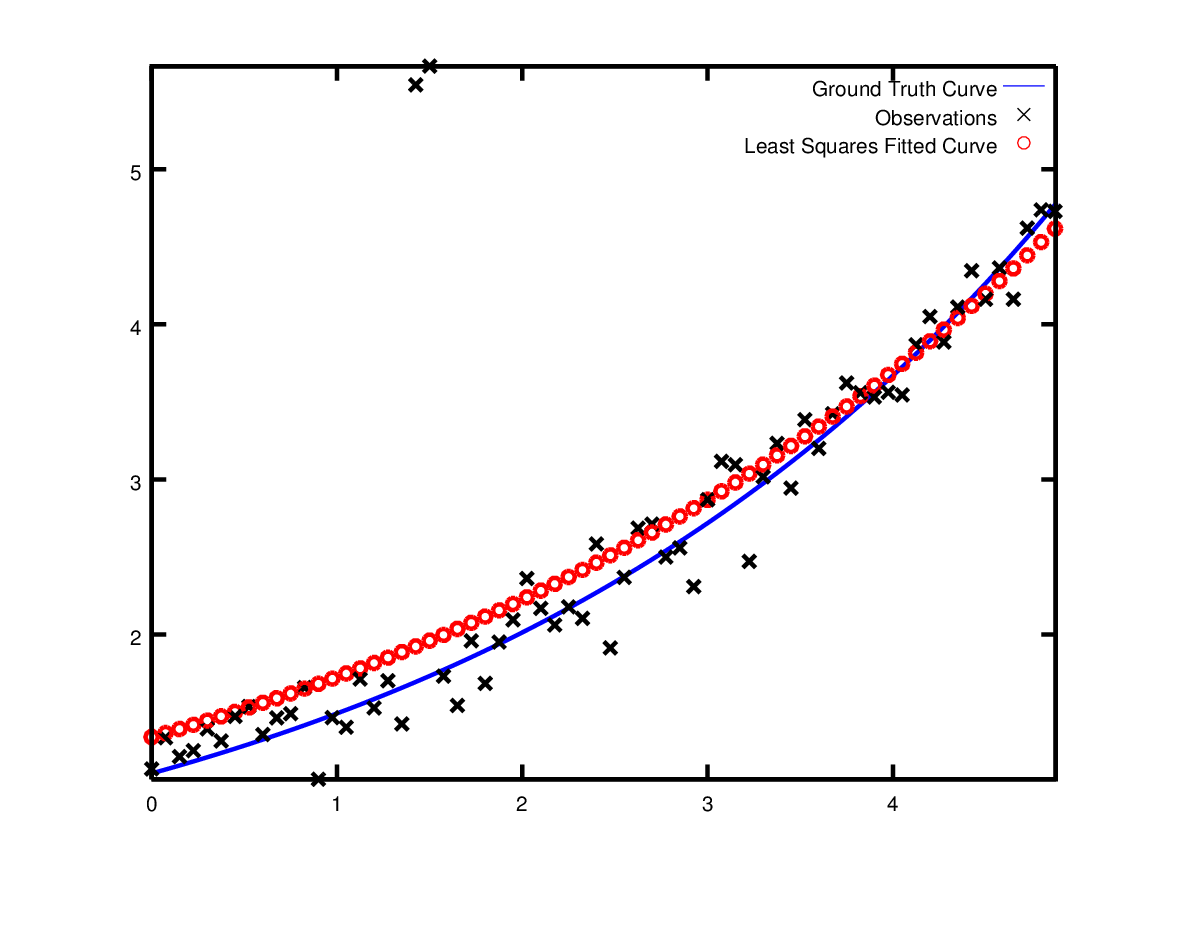
为了处理这些噪点,一个技巧是使用LossFunction。此函数减小大偏差对整个残差模块的影响。大偏差经常属于Outliers。加入残差函数,我们修要做修改
problem.AddResidualBlock(cost_function, NULL , &m, &c);
改为
problem.AddResidualBlock(cost_function, new CauchyLoss(0.5) , &m, &c);
CauchyLoss是Ceres Solver发明的损失函数之一。0.5是损失函数的尺度。加入损失函数后,我们获得更好的拟合结果。

下一篇文章里,我们重点介绍Ceres是计算机三维视觉里的重要应用:光束平差法(Bundle Adjustment),一般简称BA。
Ceres Solver: 高效的非线性优化库(二)实战篇的更多相关文章
- Ceres Solver: 高效的非线性优化库(一)
Ceres Solver: 高效的非线性优化库(一) 注:本文基于Ceres官方文档,大部分由英文翻译而来.可作为非官方参考文档. 简介 Ceres,原意是谷神星,是发现不久的一颗轨道在木星和火星之间 ...
- Android 图片加载库Glide 实战(二),占位符,缓存,转换自签名高级实战
http://blog.csdn.net/sk719887916/article/details/40073747 请尊重原创 : skay <Android 图片加载库Glide 实战(一), ...
- 二、Redis基本操作——String(实战篇)
小喵万万没想到,上一篇博客,居然已经被阅读600次了!!!让小喵感觉压力颇大.万一有写错的地方,岂不是会误导很多筒子们.所以,恳请大家,如果看到小喵的博客有什么不对的地方,请尽快指正!谢谢! 小喵的唠 ...
- Ceres Solver for android
最近开发中,需要对图片做一些处理与线性技术,这时就用到了Ceres Solver.如何把Ceres Solver集成到Android里呢? 官网给了一个解决方案,简洁明了: Downloa ...
- Ceres Solver 入门稍微多一点
其实ceres solver用了挺多的,可能是入门不精,有时候感觉感觉不理解代码上是怎么实现的,这次就通过ceres的官网仔细看了一些介绍,感觉对cpp了解更好了一些. 跟g2o的比较的话,感觉cer ...
- Android JNI学习(二)——实战JNI之“hello world”
本系列文章如下: Android JNI(一)——NDK与JNI基础 Android JNI学习(二)——实战JNI之“hello world” Android JNI学习(三)——Java与Nati ...
- VINS(九)Ceres Solver优化(未完待续)
使用Ceres Solver库处理后端优化问题,首先系统的优化函数为
- 工作经常使用的SQL整理,实战篇(二)
原文:工作经常使用的SQL整理,实战篇(二) 工作经常使用的SQL整理,实战篇,地址一览: 工作经常使用的SQL整理,实战篇(一) 工作经常使用的SQL整理,实战篇(二) 工作经常使用的SQL整理,实 ...
- JSTL标签库的基本教程之核心标签库(二)
JSTL标签库的基本教程之核心标签库(二) 核心标签库 标签 描述 <c:out> 用于在JSP中显示数据,就像<%= ... > <c:set> 用于保存数据 & ...
随机推荐
- Design:目录
ylbtech-Design:目录 1.返回顶部 1. http://idesign.qq.com/#!index/feed 2. https://www.behance.net/ 3. 2.返回顶部 ...
- word2010以上版本中快捷录入数学公式的方法(二)
以前推荐的方法,随着方正飞翔网站上关闭了数学公式输入法的支持也不能不用了,现在再推荐一个可以在word2010以上版中快捷输入数学公式的方法,安装AxMath,一切问题都OK!我是直接购买的正版,25 ...
- springMVC绑定json参数之二(2.2.2)
二.springmvc 接收不同格式的json字符串 2).格式二:json字符串数组 前台: test = function () { var test = ["123",&qu ...
- C#设计模式(7)——适配器模式
一.概述 将一个类的接口转换成客户希望的另外一个接口.Adapter模式使得原本由于接口不兼容而不能一起工作的那些类可以在一起工作. 二.模型 三.代码实现 using System; /// 这里以 ...
- Zend Server 安装与配置图文教程
Zend Server是一款专业的PHP Web开发应用服务器,一些初次接触并使用此程序的朋友可能不太了解安装方法,本文为您提供了Zend Server 安装与配置图文教程,欢迎大家阅读,并提出自己的 ...
- 第五篇 elasticsearch express插入数据
1.后端 在elasticsearch.js文件夹下添加: function addDocument(document) { return elasticClient.index({ index: i ...
- C++中的对象的赋值和复制
对象的赋值 如果对一个类定义了两个或多个对象,则这些同类的对象之间可以互相赋值,或者说,一个对象的值可以赋给另一个同类的对象.这里所指的对象的值是指对象中所有数据成员的值. 对象之间的赋值也是通过赋值 ...
- R: data.frame 生成、操作数组。重命名、增、删、改
################################################### 问题:生成.操作数据框 18.4.27 怎么生成数据框 data.frame.,,及其相关操 ...
- vue中computed与methods的异同
在vue.js中,有methods和computed两种方式来动态当作方法来用的 如下: 两种方式在这种情况下的结果是一样的 写法上的区别是computed计算属性的方式在用属性时不用加(),而met ...
- 谈谈Java异常处理这件事儿
此文已由作者谢蕾授权网易云社区发布. 欢迎访问网易云社区,了解更多网易技术产品运营经验. 前言 我们对于"异常处理"这个词并不陌生,众多框架和库在异常处理方面都提供了便利,但是对于 ...