高通lk:配置与使用i2c
高通lk:配置与使用i2c
以msm8909为例。
背景
在lk中要去驱动一个aw9523的ic来控制指示灯。
但是现在对应的i2c没有打开。因此需要进行处理。
步骤
找到I2C对应的ID与句柄
参考文档:80-nu767-1_l_bam_low-speed_peripherals_(blsp)_user_guide.pdf
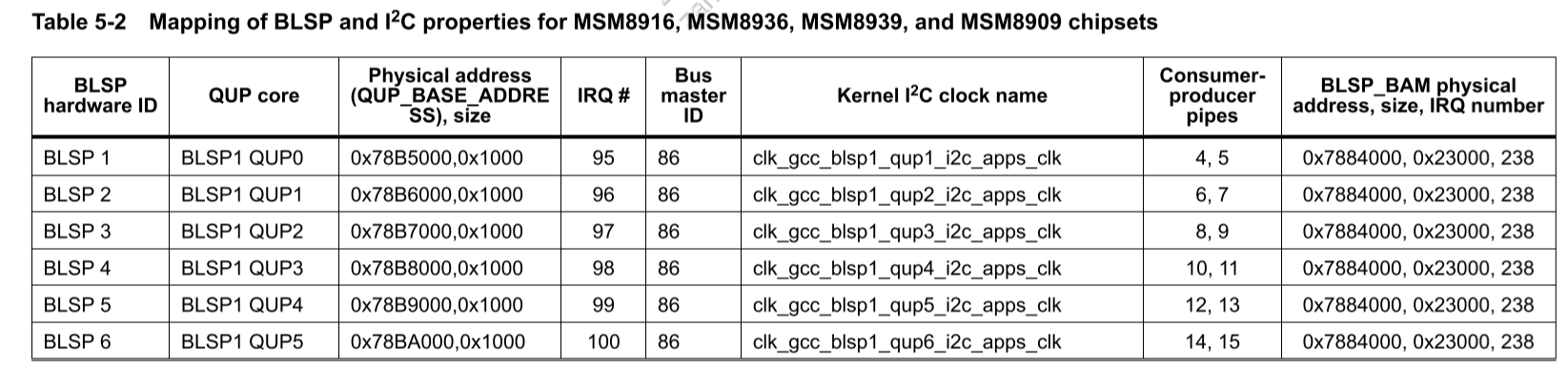
根据其他人的说法,i2c-1对应的是第一个BLSP1、QUP0、0x78B5000。
添加有关的时钟
路径:bootable/bootloader/lk/platform/msm8909/msm8909-clock.c
+
+// i2c-1
+static struct clk_freq_tbl ftbl_gcc_blsp1_qup1_i2c_apps_clk_src[] =
+{
+ F( 96000, cxo, 10, 1, 2),
+ F( 4800000, cxo, 4, 0, 0),
+ F( 9600000, cxo, 2, 0, 0),
+ F( 16000000, gpll0, 10, 1, 5),
+ F( 19200000, cxo, 1, 0, 0),
+ F( 25000000, gpll0, 16, 1, 2),
+ F( 50000000, gpll0, 16, 0, 0),
+ F_END
+};
+
+static struct rcg_clk gcc_blsp1_qup1_i2c_apps_clk_src =
+{
+ .cmd_reg = (uint32_t *) GCC_BLSP1_QUP1_CMD_RCGR,
+ .cfg_reg = (uint32_t *) GCC_BLSP1_QUP1_CFG_RCGR,
+ .set_rate = clock_lib2_rcg_set_rate_hid,
+ .freq_tbl = ftbl_gcc_blsp1_qup1_i2c_apps_clk_src,
+ .current_freq = &rcg_dummy_freq,
+
+ .c = {
+ .dbg_name = "gcc_blsp1_qup1_i2c_apps_clk_src",
+ .ops = &clk_ops_rcg,
+ },
+};
+
+static struct branch_clk gcc_blsp1_qup1_i2c_apps_clk = {
+ .cbcr_reg = GCC_BLSP1_QUP1_APPS_CBCR,
+ .parent = &gcc_blsp1_qup1_i2c_apps_clk_src.c,
+
+ .c = {
+ .dbg_name = "gcc_blsp1_qup1_i2c_apps_clk",
+ .ops = &clk_ops_branch,
+ },
+};
+
static struct rcg_clk gcc_blsp1_qup2_i2c_apps_clk_src =
{
@@ -585,6 +623,11 @@ static struct clk_lookup msm_clocks_msm8909[] =
CLK_LOOKUP("gcc_blsp1_qup2_i2c_apps_clk", gcc_blsp1_qup2_i2c_apps_clk.c),
+ // i2c-1
+ CLK_LOOKUP("blsp1_qup1_ahb_iface_clk", gcc_blsp1_ahb_clk.c),
+ CLK_LOOKUP("gcc_blsp1_qup1_i2c_apps_clk_src", gcc_blsp1_qup1_i2c_apps_clk_src.c),
+ CLK_LOOKUP("gcc_blsp1_qup1_i2c_apps_clk", gcc_blsp1_qup1_i2c_apps_clk.c),
+
CLK_LOOKUP("mdp_ahb_clk", mdp_ahb_clk.c),
CLK_LOOKUP("mdss_esc0_clk", mdss_esc0_clk.c),
CLK_LOOKUP("mdss_axi_clk", mdss_axi_clk.c),
初始化
+static void i2c1_init(void)
+{
+ static int flag = 1;
+
+ dprintf(CRITICAL, "%s : start\n", __func__);
+ if(flag != 1)
+ goto end;
+ flag = 0;
+ // i2c-1
+ /*
+ 1 arg: BLSP ID can be BLSP_ID_1 or BLSP_ID_2
+ 2 arg: QUP ID can be QUP_ID_0 ~ QUP_ID_5
+ 3 arg: I2C CLK. should be 100KHZ, or 400KHz
+ 4 arg: Source clock, should be set @ 19.2MHz
+ */
+ i2c_dev = qup_blsp_i2c_init(BLSP_ID_1, QUP_ID_0, 100000, 19200000);
+ if(!i2c_dev)
+ dprintf(CRITICAL, "qup_blsp_i2c_init failed \n");
+end :
+ dprintf(CRITICAL, "%s : end\n", __func__);
+
+}
确保底层的调用没问题:
路径:bootable/bootloader/lk/platform/msm8909/acpuclock.c
/* Configure i2c clock */
void clock_config_blsp_i2c(uint8_t blsp_id, uint8_t qup_id)
{
uint8_t ret = 0;
char clk_name[64];
struct clk *qup_clk;
if((blsp_id != BLSP_ID_1) || (qup_id > QUP_ID_5)) {
dprintf(CRITICAL, "Incorrect BLSP-%d or QUP-%d configuration\n", blsp_id, qup_id);
ASSERT(0);
}
snprintf(clk_name, sizeof(clk_name), "blsp1_qup1_ahb_iface_clk");
ret = clk_get_set_enable(clk_name, 0 , 1);
if (ret) {
dprintf(CRITICAL, "Failed to enable %s clock\n", clk_name);
return;
}
snprintf(clk_name, sizeof(clk_name), "gcc_blsp1_qup1_i2c_apps_clk");
qup_clk = clk_get(clk_name);
if (!qup_clk) {
dprintf(CRITICAL, "Failed to get %s\n", clk_name);
return;
}
ret = clk_enable(qup_clk);
if (ret) {
dprintf(CRITICAL, "Failed to enable %s\n", clk_name);
return;
}
}
如果匹配不上的话,会导致下面错误:
Alert!! Requested clock "blsp1_qup1_ahb_iface_clk" is not supported![1140] [1140] Can't find clock with id: blsp1_qup1_ahb_iface_clk
读/写
+static int write_reg(uint8_t slave_addr, uint8_t reg, uint8_t val)
+{
+ int ret = 0;
+ uint8_t data_buf[] = { reg, val };
+
+ /* Create a i2c_msg buffer, that is used to put the controller into write
+ mode and then to write some data. */
+ struct i2c_msg msg_buf[] = { {slave_addr, I2C_M_WR, 2, data_buf} };
+
+ ret = qup_i2c_xfer(i2c_dev, msg_buf, 1);
+ if(ret < 0) {
+ dprintf(CRITICAL, "qup_i2c_xfer error %d\n", ret);
+ return ret;
+ }
+ return 0;
+}
+
+static int read_reg(uint8_t slave_addr, uint8_t reg, uint8_t *val)
+{
+ int ret = 0;
+ /* Create a i2c_msg buffer, that is used to put the controller into read
+ mode and then to read some data. */
+ struct i2c_msg msg_buf[] = {
+ {slave_addr, I2C_M_WR, 1, ®},
+ {slave_addr, I2C_M_RD, 1, val}
+ };
+
+ ret = qup_i2c_xfer(i2c_dev, msg_buf, 2);
+ if(ret < 0) {
+ dprintf(CRITICAL, "qup_i2c_xfer error %d\n", ret);
+ return ret;
+ }
+ return 0;
+}
高通lk:配置与使用i2c的更多相关文章
- 高通lk屏幕向kernel传参
LK把相关参数报存到cmdline上: 在Bootable\bootloader\lk\dev\gcdb\display\gcdb_display_param.c上gcdb_display_cmdli ...
- 高通(QCOM)sensor bring up
高通7150平台 1.添加驱动文件 2.添加编译 3.配置json文件 4.高通默认配置 5.部分sensor外挂电源 6.遇到的问题 1.添加驱动文件 路径:adsp_proc/ssc/sensor ...
- 高通spi 屏幕 -lk代码分析
lk SPI驱动 1. 初始化时钟 在lk中,我们是从kmain开始执行下来的,而执行顺序则是先初始化时钟,也就是在platform_early_init函数中开始执行的: 在这里我们需要修改这个函数 ...
- 高通APQ8074 spi 接口配置
高通APQ8074 spi 接口配置 8074 平台含有两个BLSP(BAM Low-Speed Peripheral) , 每一个BLSP含有两个QUP, 每一个QUP可以被配置为I2C, SPI, ...
- 【转】高通平台android 环境配置编译及开发经验总结
原文网址:http://blog.csdn.net/dongwuming/article/details/12784535 1.高通平台android开发总结 1.1 搭建高通平台环境开发环境 在高通 ...
- 高通移植mipi LCD的过程LK代码
lk部分:(实现LCD兼容) 1. 函数定位 aboot_init()来到target_display_init(): 这就是高通原生lk LCD 兼容的关键所在.至于你需要兼容多少LCD 就在whi ...
- 最新内核3.4)Linux 设备树加载I2C client adapter 的流程(内核3.4 高通)【转】
转自:https://blog.csdn.net/lsn946803746/article/details/52515225 版权声明:本文为博主原创文章,遵循 CC 4.0 BY-SA 版权协议,转 ...
- 高通平台msm8909 LK 实现LCD 兼容
前段时间小米出现红米note2 换屏门,现在我们公司也要上演了:有两个供应商提供不同IC 的LCD panel. 软件区分的办法是读取LCD IC 的ID 寄存器,下面解析高通平台LK中LCD兼容的过 ...
- 高通平台 lcd driver 调试小结
一.概述 1.1 简介 本文档主要包括LCD模块的驱动流程分析.Framebuffer相关知识.Gralloc等相关内容,以及LCD调试的一些经验和相关bug的分析和讲解. 1.2 开发环境 And ...
- Linux加载DTS设备节点的过程(以高通8974平台为例)
DTS是Device Tree Source的缩写,用来描述设备的硬件细节.在过去的ARM Linux中,arch/arm/plat-xxx和arch/arm/mach-xxx中充斥着大量的垃圾代码, ...
随机推荐
- 数据可视化之pyecharts模块
1.简介 pyecharts 是一个用于生成 Echarts 图表的类库. Echarts 是百度开源的一个数据可视化 JS 库.主要用于数据可视化. # 安装 # 安装v1版本之上的有一些报错 py ...
- 手把手搭建WebSocket多人在线聊天室(SpringBoot+WebSocket)
前言 本文中搭建了一个简易的多人聊天室,使用了WebSocket的基础特性. 源代码来自老外的一篇好文: https://www.callicoder.com/spring-boot-websocke ...
- postman使用中问题汇总
当用postman来通过接口造数据时,读取参数化文件中身份证字段的值读取错误. 参数文件如下 选择参数文件后预览的数据如下 身份证号码全部变成了0000结尾的 解决方案: 需要将身份证号码用引号引起来 ...
- R2_ES中数据的存储测试
基本概念:ES(一): 架构及原理 关系数据库 ⇒ 数据库 ⇒ 表 ⇒ 行 ⇒ 列(Columns) Elasticsearch ⇒ 索引(Index) ⇒ 类型(Type) ⇒ 文档(Documen ...
- 简说Python之数字和变量
目录 Python的运算 Python关于进制的一些描述 十六进制的显示 八进制和二进制的显示 转成二进制,八进制,十六进制的方法 二,八,十六进制转回十进制的方法 Python变量 数字类型 浮点数 ...
- 运行程序时报go: cannot find main module, but found .git/config in
编写单元测试,运行时报下面的错误 haima@haima-PC:/media/haima/34E401CC64DD0E28/site/go/src/haimait/learn/base/cheshi0 ...
- IDEA连接github
在IDEA中添加github账号: File-->Settings-->Version Control-->GitHub 点击 + 号,添加账号可以选择账号密码登陆或者使用token ...
- java学习之旅(day.18)
网络编程 概述 计算机网络:自己百度吧 网络编程的目的:传播交流信息.数据交换.通信 想要达到这个效果需要什么: 如何准确的定位网络上的一台主机 端口 定位到这个计算机上的某个资源 找到了这个主机,如 ...
- 数字化开采|AIRIOT智慧矿山自动化生产解决方案
由于矿山地形复杂,生产自动化水平低,安全监管技术落后,事故频发等很多因素对煤矿开采技术提出了数据化.可视化.智能化的要求.通过目前的煤矿开采现状可以发现煤矿开采过程中,在生产.监管.巡检.安全.效 ...
- 创建 Vue3 项目
前提条件 安装 Nodejs 下载:https://nodejs.org/en/download/prebuilt-installer 切换 npm 源 npm config set registry ...