UART学习之路(三)基于STM32F103的USART实验
关于STM32串口的资料可以在RM0008 Reference Manual中找到,有中文版的资料。STM32F103支持5个串口,选取USART1用来实验,其对应的IO口为PA9和PA10。这次的实验基于ALIENTEK的开发板,开发版通过CH340G实现将串口转成USB。因此需要做好一些准备工作。
1.PC端安装Keil v5 MDK开发工具;
2.PC端安装CH340G的驱动;
3.PC端安装ATK XCOM串口收发程序
STM32的串口编程思路:
1.串口时钟设置和复位;
2.选取发射口和接收口的引脚,并设置GPIO端口参数;
3.串口参数的初始化(完成波特率、字长、奇偶校验、收发模式等参数的设置);
4.初始化NVIC(Nested Vectored Interrupt Controller,内嵌向量中断控制器);
5.开启中断和使能串口
代码如下:
//main.c:
#include "uart.h" int main()
{
uart1_init();
while()
{
}
}
//USART.c
#include "uart.h" #define USART1_REC_LEN 256 u8 Uart1_RevBuf_Tail = ;//接收缓冲区尾部
u8 Uart1_RevBuf[USART1_REC_LEN];//接收缓冲区数组 void uart1_init()
{
//GPIO端口设置
GPIO_InitTypeDef GPIO_InitStructure;
USART_InitTypeDef USART_InitStructure;
NVIC_InitTypeDef NVIC_InitStructure; RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1|RCC_APB2Periph_GPIOA, ENABLE);
USART_DeInit(USART1); //USART1端口配置
//UASART_TX PA9
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9; //PA.9
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //复用推挽输出
GPIO_Init(GPIOA, &GPIO_InitStructure); //初始化PA9
//USART1_RX PA10
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;//浮空输入
GPIO_Init(GPIOA, &GPIO_InitStructure); //初始化PA10 //USART1 初始化设置
USART_InitStructure.USART_BaudRate = ;//波特率设置
USART_InitStructure.USART_WordLength = USART_WordLength_8b;//字长为8位数据格式
USART_InitStructure.USART_StopBits = USART_StopBits_1;//一个停止位
USART_InitStructure.USART_Parity = USART_Parity_No;//无奇偶校验位
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;//无硬件数据流控制
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx; //收发模式
USART_Init(USART1, &USART_InitStructure); //初始化串口1 //Usart1 NVIC 配置
NVIC_InitStructure.NVIC_IRQChannel = USART1_IRQn;//串口1中断通道
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority=;//抢占优先级3
NVIC_InitStructure.NVIC_IRQChannelSubPriority =; //子优先级3
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //IRQ通道使能
NVIC_Init(&NVIC_InitStructure); //根据指定的参数初始化VIC寄存器 USART_Init(USART1, &USART_InitStructure);
USART_ITConfig(USART1, USART_IT_RXNE, ENABLE);//开启相关中断
USART_Cmd(USART1, ENABLE); //使能串口1 } //串口1中断服务程序
void USART1_IRQHandler(void)
{
if(USART_GetITStatus(USART1, USART_IT_RXNE) != RESET) //接收中断
{ Uart1_RevBuf[Uart1_RevBuf_Tail] = USART_ReceiveData(USART1);//读取接收到的数据,将尾标后移
USART_SendData(USART1,Uart1_RevBuf[Uart1_RevBuf_Tail]);//发送接收到的数据
while (USART_GetFlagStatus(USART1, USART_FLAG_TC) == RESET)
{}
Uart1_RevBuf_Tail++;
if(Uart1_RevBuf_Tail>USART1_REC_LEN-)
{
Uart1_RevBuf_Tail = ;
}
}
}
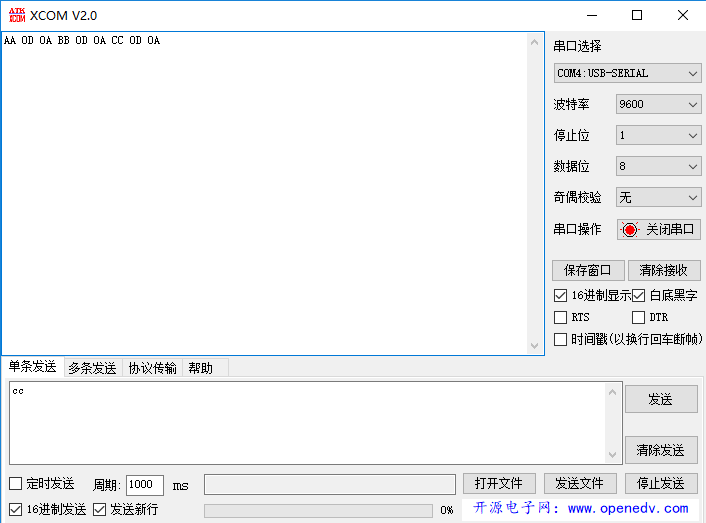
主函数非常简单,就是调用uart_init()然后等待串口1的接收中断触发。串口1的中断服务函数功能是:当PC端发送据后,将接收到的数据重新发回给PC机。uart_init()的功能是完成串口的配置。在接收数据的时候设置了一个容量位256的数据缓冲区Uart1_RevBuf,用来存放接收到的数据。
程序的运行结果如下。分别发送AA,BB,CC后PC端接收到了AA 0D 0A BB 0D 0A CC 0D 0A,0D和0A分别表示回车和换行。说明结果正确。
在实际应用中,上位机可以通过多个串口和多个从设备进行通信,因此在串口通信的时候要自行规定一个通信协议。比如由1.头,2.设备号,3.数据长度,4.数据,5.结束位,6.间隔位组成一个数据包。根据协议编写解包函数。解包函数的大致思路就是将接收到的数据一步一步的进行判断,最终完成解出数据的功能。
1.数据包定义:
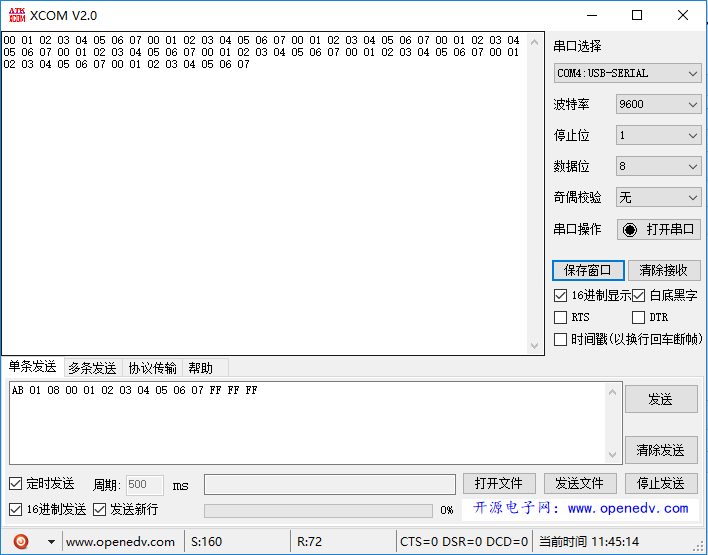
头:0xAB,设备号:0x01(一号设备),数据长度:0x08(8位数据),数据位:DATA,结束位:0xFF,间隔位:0xFF 0xFF
2.解包函数:
PC机发送一个数据包:AB 01 08 00 01 02 03 04 05 06 07 FF FF FF,解包函数能够将数据00 01 02 03 04 05 06 07取出来并再次发送给PC机。PC机将数据发送给STM32F103,触发接收中断,将数据存入接收缓冲区中,解包函数从缓冲区的头部开始检索,完成数据分析,取出数据。代码如下:
#include "stm32f10x.h"
#include <stdio.h> #define Usart1RecLength 256 u8 Uart1_RevBuf_Tail = ;
u8 Uart1_RevBuf_Head = ;
u8 Uart1_RevBuf[Usart1RecLength];
u8 RecState = ;
u8 TemplateData;
u8 DataLength = ;
u8 Data[]={}; typedef struct
{
u8 StartDataError;
u8 DeviceDataError;
u8 LengthDataError;
u8 StopDataError; u8 DataReady;
}DataFrameFlag; DataFrameFlag USART1_FrameFlags; void USART1_IRQHandler(void)
{
if(USART_GetITStatus(USART1, USART_IT_RXNE) != RESET) //接收中断
{
Uart1_RevBuf[Uart1_RevBuf_Tail] = USART_ReceiveData(USART1); //读取接收到的数据
Uart1_RevBuf_Tail++;
if(Uart1_RevBuf_Tail > Usart1RecLength-)
{
Uart1_RevBuf_Tail = ;
}
}
} void RecDataAnalysis()
{
u8 i = ;
if(Uart1_RevBuf_Head != Uart1_RevBuf_Tail)//判断是否有数据
{
TemplateData = Uart1_RevBuf[Uart1_RevBuf_Head];//从数据缓冲区取数据
Uart1_RevBuf_Head ++;
if(Uart1_RevBuf_Head > Usart1RecLength-)
{
Uart1_RevBuf_Head = ;
} USART1_FrameFlags.DeviceDataError = ;
USART1_FrameFlags.StopDataError = ;
USART1_FrameFlags.LengthDataError = ;
USART1_FrameFlags.StartDataError = ; switch(RecState)
{
case :
if(TemplateData == 0xAB)//头
{
RecState = ;
}
else
{
RecState = ;
USART1_FrameFlags.StartDataError = ;
}
break;
case :
if(TemplateData == 0x01)//设备号
{
RecState = ;
}
else
{
RecState = ;
USART1_FrameFlags.DeviceDataError = ;
}
break;
case :
if(TemplateData == 0x08)//数据位
{
RecState = ;
}
else
{
RecState = ;
USART1_FrameFlags.LengthDataError = ;
}
break;
case ://转存数据
if(DataLength == )
{
RecState = ;
USART1_FrameFlags.DataReady = ;
}
else if(DataLength != )
{
Data[-DataLength] = TemplateData;
DataLength = DataLength -;
}
break;
case :
if(TemplateData == 0xFF)//尾部
{
RecState = ;
DataLength = ;
}
else
{
for(i=;i < ;i++)
{
Data[i] = ;
}
RecState = ;
DataLength = ;
USART1_FrameFlags.StopDataError = ;
USART1_FrameFlags.DataReady = ;
}
break;
default:
for(i=;i < ;i++)
{
Data[i] = ;
}
RecState = ;
DataLength = ;
break;
}
}
} void Resend()//测试用重发数据函数
{
u8 i = ;
if(USART1_FrameFlags.DataReady == )
{
for(i=;i<;i++)
{
USART_SendData(USART1,Data[i]);
while (USART_GetFlagStatus(USART1, USART_FLAG_TC) == RESET);
USART1_FrameFlags.DataReady = ;
}
}
}
函数RecDataAnalysis()完成数据解包,函数Resend()在解包函数准备好数据将数据回发给PC机。结构体DataFrameFlag的作用是当数据出现错误时完成报错,是可选功能,程序中给了一种思路,未做调试。结果如下:
UART学习之路(三)基于STM32F103的USART实验的更多相关文章
- zigbee学习之路(十三):基于协议栈的Usart 实验
一.前言 这次实验我们来学习基于zigbee的串口通信实验,揭开zigbee神秘的面纱,让大家可以用zigbee协议编制属于自己的程序,这次实验只是串口发送数据,并没有进行无线的数据传输,为的是使大家 ...
- UART学习之路(一)基本概念
第一篇博客,首先记录一下这一个多星期来的学习内容. UART学习之路第一篇,是UART的基本概念介绍.后续会用STM32F103的串口与PC机通信.最后使用Verilog HDL写出串口发送模块和接收 ...
- 学习之路三十九:新手学习 - Windows API
来到了新公司,一开始就要做个程序去获取另外一个程序里的数据,哇,挑战性很大. 经过两周的学习,终于搞定,主要还是对Windows API有了更多的了解. 文中所有的消息常量,API,结构体都整理出来了 ...
- UART学习之路(四)VerilogHDL实现的简单UART,VIVADO下完成仿真
用VerilogHDL实现UART并完成仿真就算是对UART整个技术有了全面的理解,同时也算是Verilog入门了.整个UART分为3部分完成,发送模块(Transmitter),接收模块(Recei ...
- Redis——学习之路三(初识redis config配置)
我们先看看config 默认情况下系统是怎么配置的.在命令行中输入 config get *(如图) 默认情况下有61配置信息,每一个命令占两行,第一行为配置名称信息,第二行为配置的具体信息. ...
- zigbee学习之路(三):按键的控制
一.前言 通过前一次的实验,相信大家都已经对cc2530程序的编写有了一定的认识,这次我们来操作和实验的是cc2530上的按键模块. 二.原理分析 我们先来看一下按键的原理图: 根据原理图我们可以得出 ...
- 学习之路三十二:VS调试的简单技巧
这段时间园子里讲了一些关于VS的快捷键以及一些配置技巧,挺好的,大家一起学习,一起进步. 这段时间重点看了一下关于VS调试技巧方面的书,在此记录一下学习的内容吧,主要还是一些比较浅显的知识. 1. 调 ...
- python学习之路 三:字符编码
本节重点 彻底掌握字符编码之前的转换关系 掌握 python2 vs python3 上编码的区别 掌握 python2 和python3 上bytes,str 的区别 补充知识点:三元运算 三元运 ...
- 交互原型设计软件axure rp学习之路(三)
(三)Axure rp元件的触发事件 l OnClick(点击时): 鼠标点击事件,除了动态面板的所有的其他元件的点击时触发.比如点击按钮. l OnMouseEnter(鼠标移入时): 鼠标进入 ...
随机推荐
- 组合数计算-java
排列组合是计算应用经常使用的算法,通常使用递归的方式计算,但是由于n!的过于大,暴力计算很不明智.一般使用以下两种方式计算. 一,递归的思想:假设m中取n个数计算排列组合数,表示为comb(m,n). ...
- 51nod 1349 最大值
题目看这里 找到每个元素g[i]作为最大值的区间[L,R],那么以他为最大值的区间数有(i-L+1)*(R-i+1)个. 为了加速,以k为最大值的区间数放入H[k],再以此统计一个前缀和,更新入H.那 ...
- echarts仪表盘配置参数
require.config({ paths:{ echarts:"js/chart" } }); require([ 'echarts', 'echarts/chart/gaug ...
- C++中在子类实现父类的方法调用
- mongod入门实战
mongod-入门 摘要: 本篇文档,带你快速启动一个mongod,到搭建主从+复制集模式的入门. 内容包括:单实例安装,复制集构建,分片构建,分片及复制集整合. 软件相关信息介绍 MongoDB 是 ...
- 【[CQOI2018]交错序列】
这个题简直有毒,\(O((a+b)^3logn)\)的做法不卡常只比\(O(2^n*n)\)多\(10\)分 看到\(a\)和\(b\)简直小的可怜,于是可以往矩阵上联想 发现这个柿子有些特殊,好像可 ...
- 【nodejs】创建第一个应用
我已经安装好了nodejs(采用安装包的方式),并在idea中安装好nodejs插件,具体参考我的随笔: http://www.cnblogs.com/yujihang/p/7011356.html ...
- 8、Dubbo-配置(3)
高可用 1.zookeeper宕机与dubbo直连 现象:zookeeper注册中心宕机,还可以消费dubbo暴露的服务. 原因: 健壮性 监控中心宕掉不影响使用,只是丢失部分采样数据 数据库宕掉后, ...
- Kali-linux攻击路由器
前面介绍的各种工具,都是通过直接破解密码,来连接到无线网络.由于在一个无线网络环境的所有设备中,路由器是最重要的设备之一.通常用户为了保护路由器的安全,通常会设置一个比较复杂的密码.甚至一些用户可能会 ...
- nginx中文文档
http://www.nginx.cn/doc/ LNMP :https://lnmp.org/faq/lnmp-vhost-add-howto.html 配置详解 配置详解2