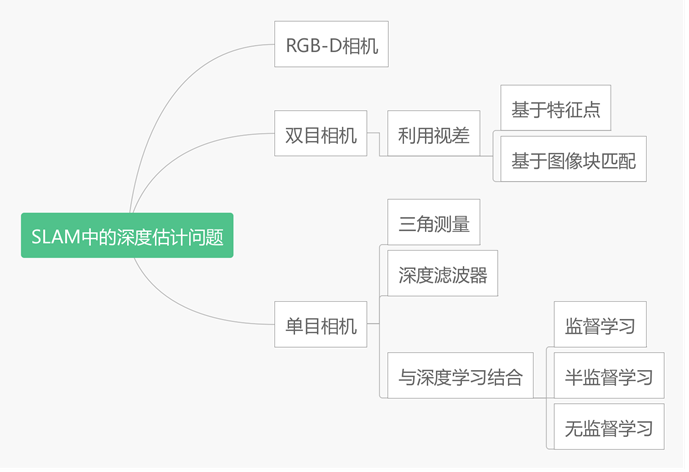
视觉SLAM中的深度估计问题
一、研究背景
视觉SLAM需要获取世界坐标系中点的深度。
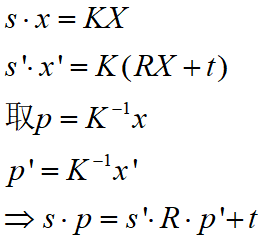
世界坐标系到像素坐标系的转换为(深度即Z):
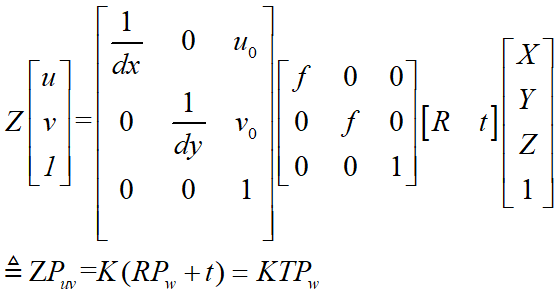
深度的获取一共分两种方式:
a)主动式
RGB-D相机按照原理又分为结构光测距、ToF相机
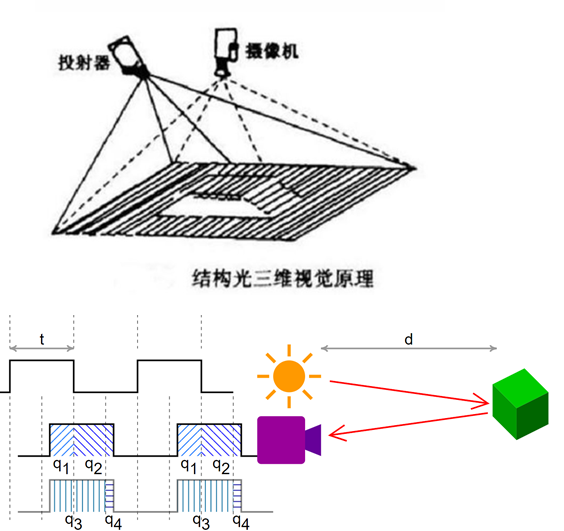
ToF相机原理
b)被动
被动式无法精确得到点的深度值,因此存在深度的估计问题,按照主流相机的种类可以分为双目相机估计以及单目相机估计。
接下来详细介绍双目系统以及单目SLAM系统的深度估计问题
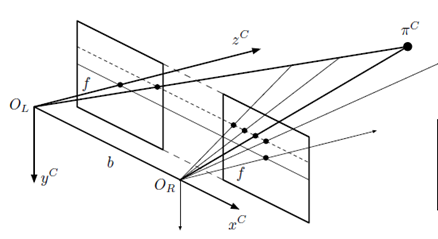
二、双目系统
双目相机模型如下图所示:
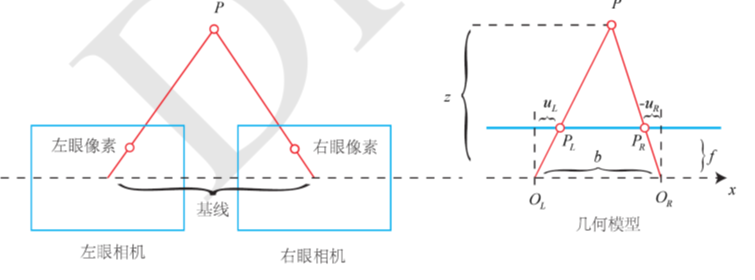
(图源《视觉SLAM十四讲》)
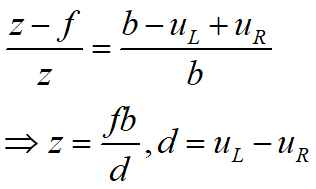
要计算深度z,需要已知世界坐标系中一点在左相机与右相机中对应的像素坐标UL与UR,即视差d。
获取d关键在于双目匹配,即左相机与右相机中的像素坐标对应的世界坐标系中的同一点。
举例:
- ORB-SLAM2基于特征点获取视差:FAST特征点+BREIF算子。

- 块匹配算法(对图像灰度值的操作)
- SAD(Sum of Absolute Difference)
- SSD(Sum of Squared Distance)
- NCC(Normalized Correlation)
得到匹配到的像素必须满足通过对极约束:
三、单目相机
针孔相机模型为:
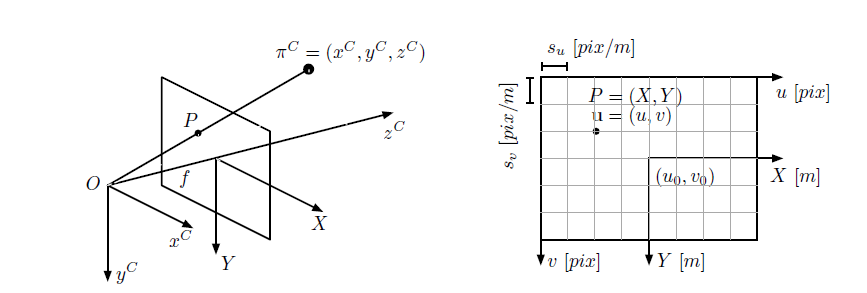
相机坐标系下为(xC,yC,zC),像素坐标系为(u,v),归一化坐标系为(u0,v0)
3.1 三角化估计深度
通过两处观察同一个夹角,从而确定该点的距离
在通过对极几何求得R,t后,R,t已知

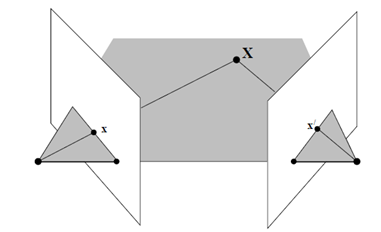
通过优化方法可求得上式中右边的最小二乘解,三角化的矛盾:平移增大,测量的精度会变高,但是可能会导致匹配失效。
ORB-SLAM单目中的三角化代码如下,可作参考:
void Initializer::Triangulate(const cv::KeyPoint &kp1, const cv::KeyPoint &kp2, const cv::Mat &P1, const cv::Mat &P2, cv::Mat &x3D)
{
cv::Mat A(,,CV_32F);
A.row() = kp1.pt.x*P1.row()-P1.row();
A.row() = kp1.pt.y*P1.row()-P1.row();
A.row() = kp2.pt.x*P2.row()-P2.row();
A.row() = kp2.pt.y*P2.row()-P2.row();
cv::Mat u,w,vt;
cv::SVD::compute(A,w,u,vt,cv::SVD::MODIFY_A| cv::SVD::FULL_UV);
x3D = vt.row().t();
x3D = x3D.rowRange(,)/x3D.at<float>();
}
3.2 深度滤波器
本质上为卡尔曼滤波估计深度
假设深度服从某种分布,最后深度的方差不断减少并收敛
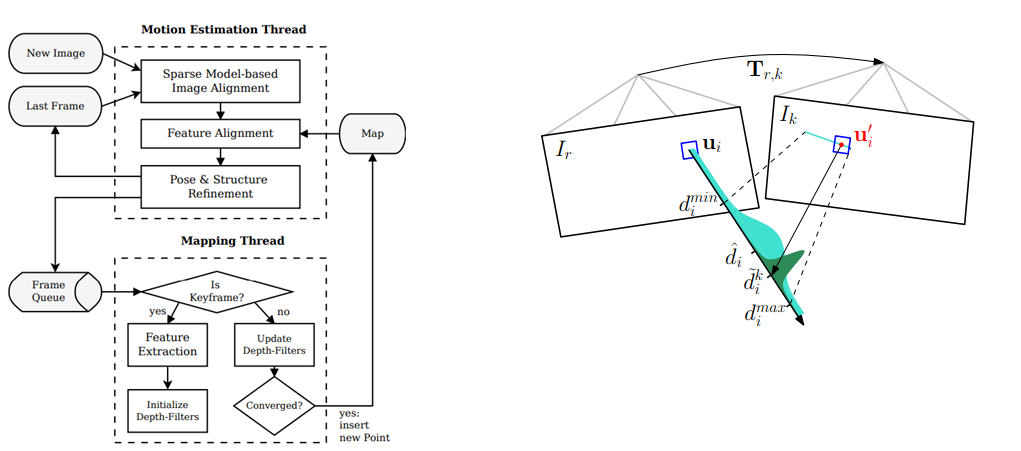
以SVO为例:
SVO估计深度流程如下:
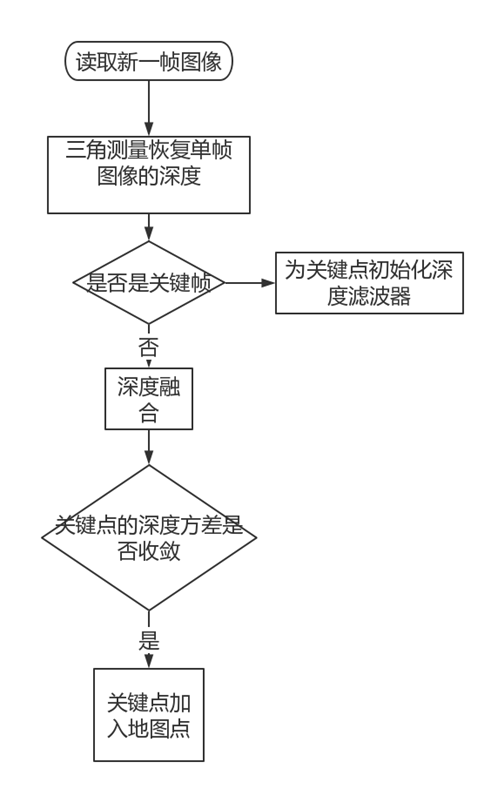
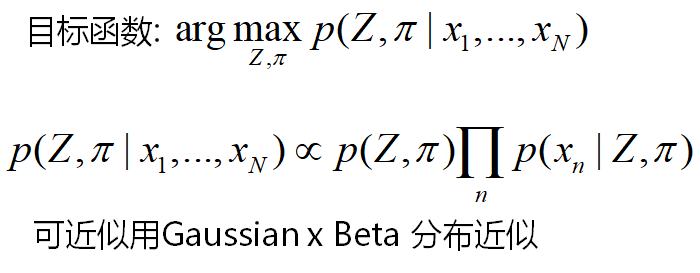
SVO中点服从高斯均匀分布:
点深度满足分布:


3.3 与监督学习结合

[]Tateno, K., Tombari, F., Laina, I., & Navab, N. (, July). CNN-SLAM: Real-time dense monocular SLAM with learned depth prediction. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR) (Vol. ).
[] Eigen D, Fergus R. Predicting depth, surface normals and semantic labels with a common multi-scale convolutional architecture[C]//Proceedings of the IEEE International Conference on Computer Vision. 2015: 2650-2658.
3.4 与非监督学习结合
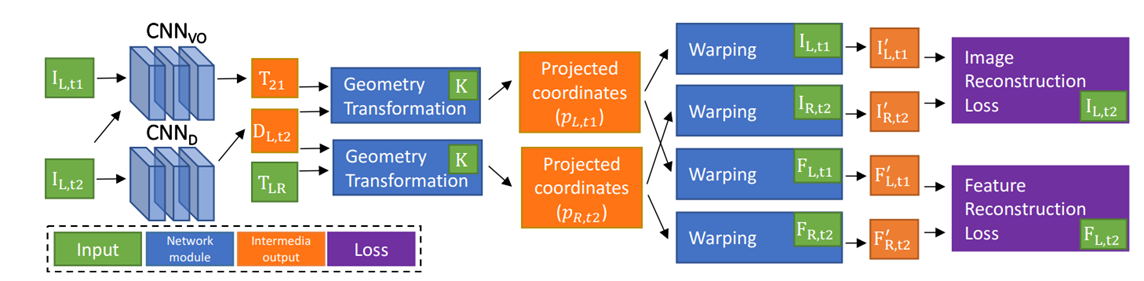
总结一下思想:

矩阵T21的估计值,深度估计网络根据单目图像,输出深度的估计值。该值再结合左右视图的变换矩阵TLR,以及相机的内参K,可以从左图重构出右图,还可以把左图的特征映射到右图。重构图和特征与真值的差异构成了损失函数,利用反向传播算法可以不断优化网络。
Zhan, H., Garg, R., Weerasekera, C. S., Li, K., Agarwal, H., & Reid, I. (, March). Unsupervised Learning of Monocular Depth Estimation and Visual Odometry with Deep Feature Reconstruction. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (pp. -).
3.5 与半监督学习结合
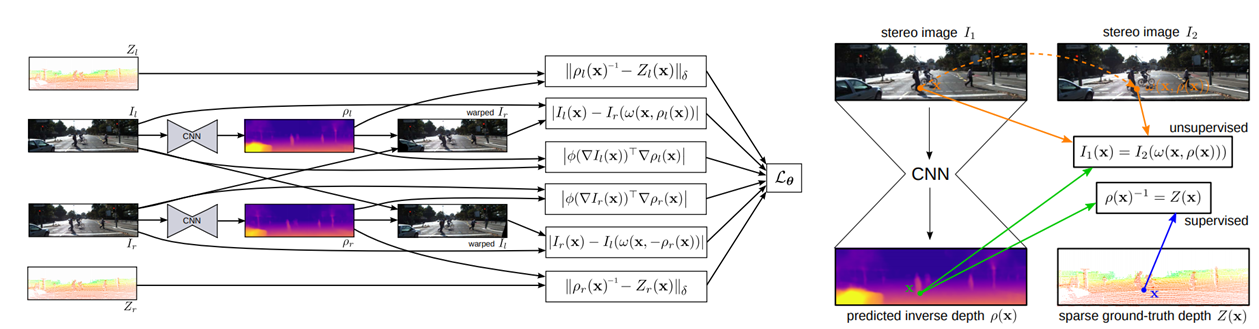
监督学习部分 ground-truth depth由激光雷达提供,无监督学习部分由双目相机的图像训练。损失函数的构成:预测深度与groud-truth的差,左图与右图+左深度图重构的左图的光度误差,右图与左图重构的光度误差,泛化损失:对深度和灰度求梯度。
Kuznietsov, Y., Stückler, J., & Leibe, B. (, July). Semi-supervised deep learning for monocular depth map prediction. In Proc. of the IEEE Conference on Computer Vision and Pattern Recognition (pp. -).
四、总结
视觉SLAM中的深度估计问题的更多相关文章
- 视觉SLAM中相机详解
视觉SLAM中,通常是指使用相机来解决定位和建图问题. SLAM中使用的相机往往更加简单,不携带昂贵的镜头,以一定的速率拍摄周围的环境,形成一个连续的视频流. 相机分类: 单目相机:只是用一个摄像头进 ...
- 视觉SLAM中的数学基础 第三篇 李群与李代数
视觉SLAM中的数学基础 第三篇 李群与李代数 前言 在SLAM中,除了表达3D旋转与位移之外,我们还要对它们进行估计,因为SLAM整个过程就是在不断地估计机器人的位姿与地图.为了做这件事,需要对变换 ...
- Deep learning for visual understanding: A review 视觉理解中的深度学习:回顾 之一
Deep learning for visual understanding: A review 视觉理解中的深度学习:回顾 ABSTRACT: Deep learning algorithms ar ...
- 视觉SLAM中的数学基础 第二篇 四元数
视觉SLAM中的数学基础 第二篇 四元数 什么是四元数 相比欧拉角,四元数(Quaternion)则是一种紧凑.易于迭代.又不会出现奇异值的表示方法.它在程序中广为使用,例如ROS和几个著名的SLAM ...
- 第六篇 视觉slam中的优化问题梳理及雅克比推导
优化问题定义以及求解 通用定义 解决问题的开始一定是定义清楚问题.这里引用g2o的定义. \[ \begin{aligned} \mathbf{F}(\mathbf{x})&=\sum_{k\ ...
- 视觉SLAM中的数学基础 第四篇 李群与李代数(2)
前言 理解李群与李代数,是理解许多SLAM中关键问题的基础.本讲我们继续介绍李群李代数的相关知识,重点放在李群李代数的微积分上,这对解决姿态估计问题具有重要意义. 回顾 为了描述三维空间里的运动,我们 ...
- 视觉SLAM关键方法总结
点"计算机视觉life"关注,置顶更快接收消息! 最近在做基于激光信息的机器人行人跟踪发现如果单独利用激光信息很难完成机器人对行人的识别.跟踪等功能,因此考虑与视觉融合的方法,这样 ...
- 《视觉SLAM十四讲》学习日志(二)——初识SLAM
小萝卜机器人的例子: 就像这种机器人,它的下面有一组轮子,脑袋上有相机(眼睛),为了让它能够探索一个房间,它需要知道: 1.我在哪——定位 2.周围环境怎么样——建图 定位和建图可以理解成感知的 &q ...
- 《视觉SLAM十四讲》第2讲
目录 一 视觉SLAM中的传感器 二 经典视觉SLAM框架 三 SLAM问题的数学表述 注:原创不易,转载请务必注明原作者和出处,感谢支持! 本讲主要内容: (1) 视觉SLAM中的传感器 (2) 经 ...
随机推荐
- Python 模块化 自定义模块 (四)
自定义模块 一个.py文件就是一个模块 创建以下三个文件: 运行test.py ,查看运行结果. #test.py print("this is test module") imp ...
- 【洛谷P2680】运输计划
题目链接 题目大意: 一棵\(n\)个点的带边权的数,给定\(m\)条树上两点间的路径,现在你可以让树上任意一条边的权值变为零, 问如何选边使得\(m\)条路径中边权和最大的路径的边权和最小 \(\m ...
- 闲话缓存:ZFS 读缓存深入研究-ARC(二)
Solaris ZFS ARC的改动(相对于IBM ARC) 如我前面所说,ZFS实现的ARC和IBM提出的ARC淘汰算法并不是完全一致的.在某些方面,它做了一些扩展: · ZFS A ...
- 如何在localStorage中存取数组
默认localStorage只能存取字符串 那么如何存取数组呢 let newlist = [] localStorage.setItem('recent', JSON.stringify(newli ...
- 【memcached的常用操作】
memcache是一个KEY-VALUE存储缓存数据库,常用作网站数据请求的存储; 提供多种API: 语法简单类似于redis; #设置一个键值存储 #添加一个键值存储 #获取键值 #删除键值 #清空 ...
- string函数库的原型
#ifndef __HAVE_ARCH_STRCPY /** * strcpy - Copy a %NUL terminated string * @dest: Where to copy the s ...
- django中的auth详解
Auth模块是什么 Auth模块是Django自带的用户认证模块: 我们在开发一个网站的时候,无可避免的需要设计实现网站的用户系统.此时我们需要实现包括用户注册.用户登录.用户认证.注销.修改密码等 ...
- python七类之集合
集合 一.关键字 : set 定义是 s = {} #当里面没有元素的时候表现为字典数据类型 s = {} #空的{}代表空的字典,而不是集合 print(type(s)) 集合是不可哈希的 ...
- 基于STM32F103ZET6 HC_SR501人体红外感应
这是最后的实验现象,有人走过会一直输出有人,离开范围时则输出没人 开发板 PZ6086L ,HC_SR501模块 这是HC_SR501的示意图,,VCC和GND不再多做介绍,5V供电就行, OUT接口 ...
- CAN总线的学习
CAN(controller Area Network )总线的学习 1986 年德国电气商博世公司开发出面向汽车的CAN 通信协议(数据之间的交互),其目的是为适应“减少线束的数量”.“通过多个LA ...