HLS:跑马灯实验
跑马灯实验的第一部分记录:
1. vivado 2018.2的HLS在跑C/RTL co-simulation的时候,一直报错,不论是用modelsim 还是vivado自带的similator。使用vivado 2015.4的HLS没有问题。
2. modelsim 我用的是10.1c版本,vivado 2018.2对modelsim支持至少是10.5以上。
3. 在vivado hls跑co-simulation未结束的情况下,打开modelsim会报错。等协同仿真跑完,再用modelsim打开波形文件。
4. Vivado 2015.4的HLS做的IP核,在VIvado 2018.2中是可以使用的。
打开Vivado HLS,新建一个工程。
工程位置和名称自定义,一直点下一步,中间添加到文件暂时不用添加,直到出现下面一步。在part selection中选好芯片型号,时钟周期 Clock Period 按照默认 10ns,Uncertaintly 和 Solution Name 均按照默认设置,然后点击 finish。

一个建立好的工程如下图所示。
在工程左侧添加如下空文件。
代码:
main.c
#include "shift_led.h"
#include <stdio.h> using namespace std; int main()
{
led_t led_o;
led_t led_i = 0xFE;//1111_1110
const int SHIFT_TIME = ;
int i;
for(i = ;i < SHIFT_TIME;i++)
{
shift_led(&led_o,led_i);
led_i = led_o;
char string[];
itoa((unsigned int)led_o&0xFF,string,);//&oxFF是为了取led_o的8位,转化为二进制数出
if(i == )
fprintf(stdout,"shift_out= 0%s\n",string);//数据对齐,高位补零
else
fprintf(stdout,"shift_out= %s\n",string);
}
}
#ifndef _SHIFT_LED_H_
#define _SHIFT_LED_H_ #include "ap_int.h" #define MAX_CNT 100000000/2
#define SHIFT_FLAG MAX_CNT-2 typedef ap_fixed<,> led_t;
typedef ap_fixed<,> cnt32_t; void shift_led(led_t *led_o,led_t led_i); #endif
shift_led.cpp
#include "shift_led.h" void shift_led(led_t *led_o,led_t led_i)
{
#pragma HLS INTERFACE ap_ovld port=led_o
#pragma HLS INTERFACE ap_ovld port=led_o
#pragma HLS INTERFACE ap_vld port=led_i led_t tmp_led;
cnt32_t i;
tmp_led = led_i;
for(i = ;i < MAX_CNT;i++)
{
if(i==SHIFT_FLAG)
{
tmp_led = ((tmp_led>>)&0x01) + ((tmp_led<<)&0xFE);
*led_o = tmp_led;
}
}
}
代码综合步骤:
步骤一:点击 Project -> Project Settings, 在 Synthesis 界面下选择综合的顶层函数名。 单击 Browse 指定工程的顶层文件, 最后单击 OK 完成修改。 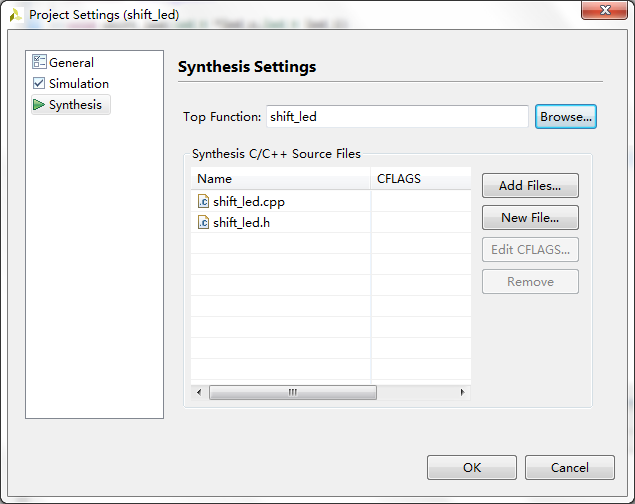
步骤二:因为当前工程中只存在一个 Solution(解决方案) , 我们右键选择 Solution –> Run C Synthesis–>Active Solutions 或者直接点击 绿色三角进行综合, 等待一段时间, 在经过优化的情况下综合报告如图所示(未经优化就是没有加任何#pragma的), 我们可以看到 FF 和 LUT 分别使用了 37 和 140。 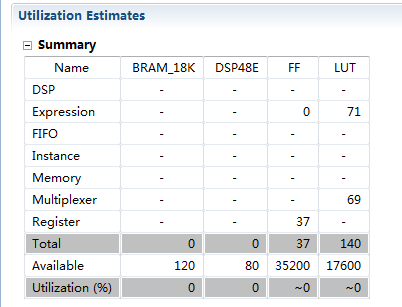
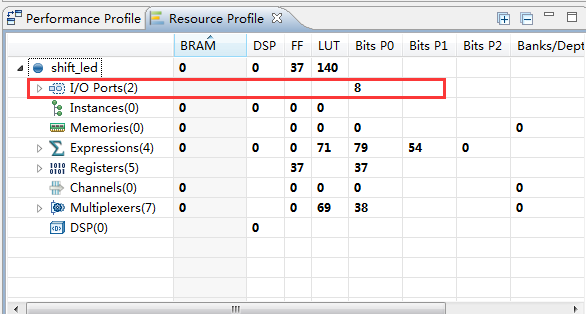
步骤三:单击solution->Open Analysis Perspective打开分析报告
在 shift_led.h 文件中我们包含一个设置 int 自定义位宽的头文件"ap_int.h", 我们使用ap_fixed()函数自定义 int 型的 bit 数, 其函数原型为:
ap_int_sim.h中class ap_fixed: public ap_fixed_base<_AP_W, _AP_I, true, _AP_Q, _AP_O, _AP_N> 。
ap_fixed<M,N>,第一个 M 代表数据总位宽, N 代表数据整数部分的位宽, 那么小数部分的位宽即 M – N; 头文件中的第6和7行代码体现了ap_fixed的用法!
步骤四:优化端口
现在把所有的#pragma都删除掉,可以看到右侧的Derective是没有指令的,只显示了一些端口信息。
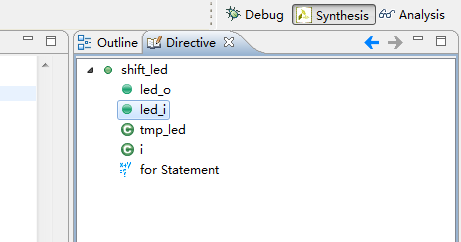
右键led_o,插入directive。
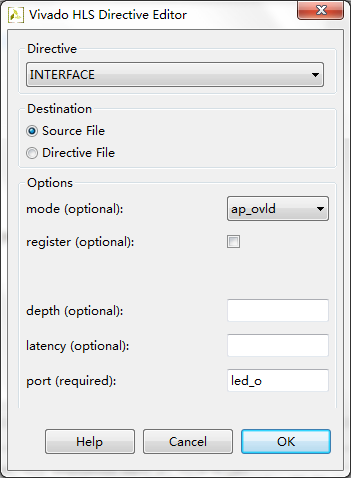
因为 led_o 是接口, 所以 Directive 我们选择为 INTERFACE,Destination 选择为 Source File。Source File 是针对所有的 Solution 采用同一个优化手段, 而 Directive File 是对当前的 Solution 有效, mode(optional)我们选为 ap_ovld,即输出使能。 对 led_i 进行同样的约束, 并选择输入使能,ap_vld。 我们再次综合,就可得到前面步骤二的经过优化后的报告了。
仿真实现步骤:
步骤一:单击 Project 下的 Run C Simulation
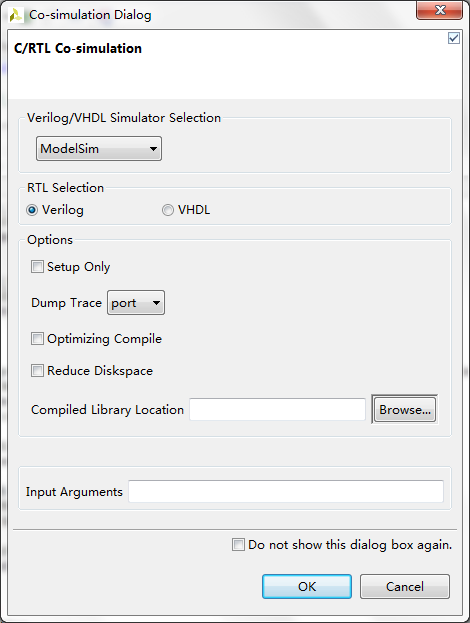
步骤二:单击 Solution 下的 Run C/RTL cosimulation 运行协同仿真。
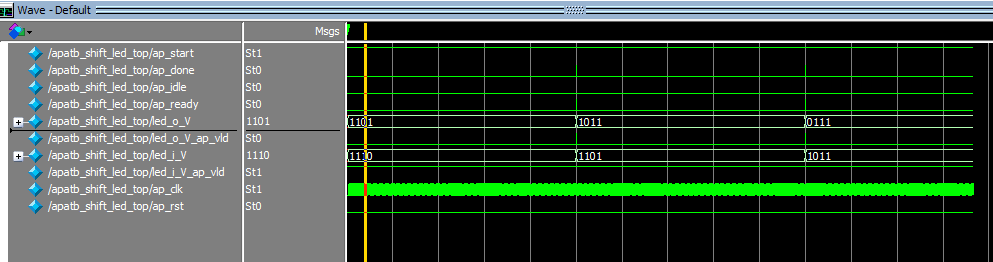
步骤三:使用Modelsim打开sim->verilog->wave.wlf文件,添加interface信号。
打包HLS代码成IP核步骤:
步骤一:单击 Solution 菜单下的 Export RTL 或直接单击 那个“田”的按钮导出 RTL 级。

这个压缩包就是我们在后面Vivado中建立工程要用的。
建立Vivado工程,添加顶层文件和约束文件。
module shift_led
#(
parameter DATA_WIDTH =
)
(
input i_clk,
input i_rst_n,
output reg [DATA_WIDTH-:] led
); reg [:] cnt ;
reg [DATA_WIDTH-:] led_i_V ;
wire ap_start ;
wire led_i_vld;
wire [DATA_WIDTH-:] led_o_V ; always@(posedge i_clk or negedge i_rst_n)begin
if(i_rst_n == 'b0)
cnt <= 'd0;
else if(cnt[]=='b0)
cnt <= cnt + 'b1;
end always@(posedge i_clk or negedge i_rst_n)begin
if(i_rst_n == 'b0)
led_i_V <= 'd0;
else if(cnt[]=='b1)
led_i_V <= 'h1;
else if(led_o_vld == 'b1)
led_i_V <= led_o_V;
end always@(posedge i_clk or negedge i_rst_n)begin
if(i_rst_n == 'b0)
led <= 'b0;
else if(led_o_vld == 'b1)
led <= led_o_V;
end assign ap_start = cnt[];
assign led_i_vld = cnt[]; shift_led_0 u_shift_led_0(
.led_o_V_ap_vld (led_o_vld),// output wire led_o_vld
.led_i_V_ap_vld (led_i_vld),// input wire led_i_vld
.ap_clk (i_clk ),// input wire ap_clk
.ap_rst (~i_rst_n ),// input wire ap_rst
.ap_start (ap_start ),// input wire ap_start
.ap_done ( ),// output wire ap_done
.ap_idle ( ),// output wire ap_idle
.ap_ready ( ),// output wire ap_ready
.led_i_V (led_i_V ),// output wire [7 : 0] led_o_V
.led_o_V (led_o_V ) // input wire [7 : 0] led_i_V
); endmodule
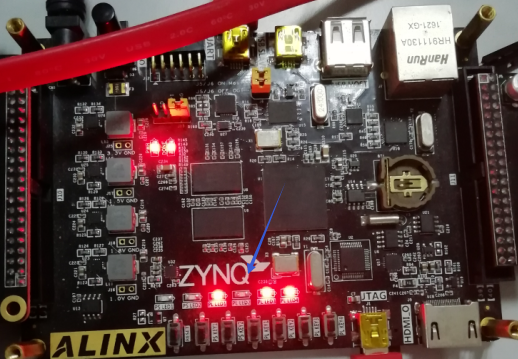
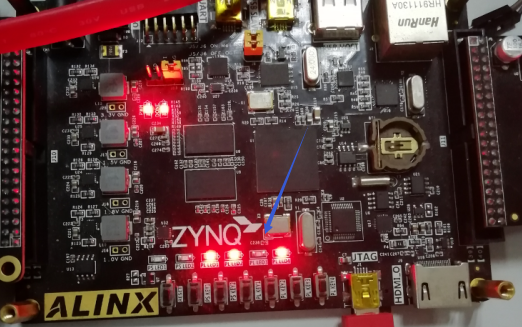
开发板现象:
HLS:跑马灯实验的更多相关文章
- S3C2410 实验三——跑马灯实验
http://www.evernote.com/shard/s307/sh/f2a748e7-34c4-4ce6-acac-82a756cc9e82/ad5813188d655e504857970db ...
- STM32开发指南-跑马灯实验
简单对I/O口的控制,主要通过对寄存器的读写控制.主要通过I/O的寄存器来控制:1. 控制I/O的方向2. 控制I/O的输出电平或上下来电阻3. 存储I/O口当前的输入状态(高低电平) 对使用LED灯 ...
- STM32F407 跑马灯实验
1.库函数版本调用的函数有哪些?对应的源文件/头文件是哪个? 库函数 源文件 头文件 RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOF, ENABLE) stm3 ...
- STM32-跑马灯实验
实验环境: STM32开发板 Keil uVision4 FlyMcu.exe 一. 建立文件夹 1.建立跟文件夹"BASE"(名称任意),再在其下建立四个子文件夹 2. 在&qu ...
- 【STM32H7教程】第18章 STM32H7的GPIO应用之跑马灯
完整教程下载地址:http://www.armbbs.cn/forum.php?mod=viewthread&tid=86980 第18章 STM32H7的GPIO应用之跑马灯 本 ...
- GPIO原理与配置(跑马灯,蜂鸣器,按键)
一.STM32 GPIO固件库函数配置方法 1. 根据需要在项目中删掉一些不用的固件库文件,保留有用的固件库文件 2. 在stm32f10x_conf.h中注释掉这些不用的头文件 3. STM32的I ...
- 嵌入式02 STM32 实验04跑马灯
开学STM32 跑马灯的实验主要就是了解GPIO口的配置及使用,我这里是使用库函数进行编程,主要需要设置以下两方面: 1.使能需要使用的IO口的时钟,一共有A.B.C.D.E.F.G七组IO口 2.初 ...
- ARM开发(1) 基于STM32的LED跑马灯
一 跑马灯原理: 1.1 本实验实现2个led的跑马灯效果,即2个led交替闪烁. 1.2 实验思路:根据电路图原理,给led相关引脚赋予高低电平,实现电路的导通,使led灯发光. 1.3 开发 ...
- STM32F4寄存器编写跑马灯例程
最近由于在学习STM32看到别人用寄存器编程控制跑马灯,于是自己也想试一试.可是试了好久终究弄不出来.回头看了下库函数的调用关系才搞明白.首先通过查看GPIOA的设置函数发现设置如下: void GP ...
随机推荐
- [.NET] WeakReference的使用
声明:本篇博客翻译自:http://tipsandtricks.runicsoft.com/CSharp/WeakReferences.html 由于水平(技术水平+英语理解能力)有限/不足,肯定会有 ...
- 让Asp.Net WebAPI支持OData查询,排序,过滤。(转)
出处:http://www.cnblogs.com/liuzhendong/p/4233380.html 让Asp.Net WebAPI支持OData后,就能支持在url中直接输入排序,过滤条件了. ...
- asp.net core 1.1 + mysqlsugar + y-ui Demo
最近研究下asp.net core 此源码架构 : .net core mvc 简单三层 依赖注入(.net core自带) mysql + mysqlsugar +sqlsugarcore 需要修 ...
- serialVersionUID的作用以及IDEA、Eclipse如何自动生成serialVersionUID
说到serialVersionUID,首先要讲讲序列化. 序列化: 序列化可以将一个java对象以二进制流的方式在网络中传输并且可以被持久化到数据库.文件系统中,反序列化则是可以把之前持久化在数据库或 ...
- tera term通过ttl脚本 自动连接服务器
在现在的这个公司一直使用tera term来远程连接服务器,感觉很方便,特别是它的ttl脚本配置的自动连接.有时候我们可能无法直接连接到目标服务器,需要通过ssh经过多个中间服务器才能连接到目标服务器 ...
- PHP(七)函数
- linux每天一小步---cd命令详解
1 命令功能: 该命令用于目录间的相互切换,cd是change directory的 缩写 2 命令语法: cd [目录名] 3 使用范例: 使用cd命令从当前用户的家目录切换到系统的根目录 ...
- angularjs之事件绑定、解除事件绑定
今天在开发时,遇到一个坑,花了一下午时间也没找到原因,无奈小菜鸟只能寻求公司里大牛的帮助,果然,大牛就是大牛,对比了几个输出结果,就看出问题所在.所以小菜鸟当然不会错过这个分享的时机啦~废话不多说进入 ...
- 18-10-30 Scrum Meeting 2
目录 站立式会议 工作记录 昨天完成的工作 1 主要完成了单词简单释义浏览和单词详细释义浏览的功能 并且已经测试和上传eolinker 2 3 主要搭建起爬虫的框架平台,并且测试了py连接服务器的功能 ...
- [leetcode] 13. Remove Duplicates from Sorted List
这个题目其实不难的,主要是我C++的水平太差了,链表那里绊了好久,但是又不像用python,所以还是强行上了. 题目如下: Given a sorted linked list, delete all ...