Retinex图像增强和暗通道去雾的关系及其在hdr色调恢复上的应用
很多人都认为retinex和暗通道去雾是八杆子都打不着的增强算法。的确,二者的理论、计算方法都完全迥异,本人直接从二者的公式入手来简单说明一下,有些部分全凭臆想,不对之处大家一起讨论。
首先,为描述方便,后面所有的图像都是归一化到[0,1]的浮点数图像。
Retinex的公式就是:
J=I/L (1)
其中,J是所求的图像,I是观测图像,L是估计的光照图像。注意,由于有J、I、L的值都在区间[0,1]内,则有L>=I成立。(这里使用符号J和I,而不是常规的R和S,主要是为了和暗通道公式保持一致,便于比较)
暗通道去雾的公式为:
J=(I-A)/t+A (2)
其中,A是光照值,t是透射率。如果我们定义遮罩图像V1, 并令t=1-V1/A, 将其带入上面公式,则有:
J = (I-V1)/(1-V1/A) (3)
一般有I>=V1, 由于光照A的值一般都偏大,接近于1,那么上面公式再次简化为:
J = (I-V1)/(1-V1) (4)
仔细观察公式(1)和(4),你发现相似之处了吗?
在公式(1)中,I值介于0和L之间,其作用就是将I线性拉伸到[0,1]之间,公式(4)中,I值介于[V1,1]之间,其作用也是将其值线性拉伸到[0,1]之间。
所以,二者是类似的。
如果现在图像I值介于[V1,L]之间,那么自然地恢复公式是:
J = (I-V1)/(L-V1) (5)
如果直接套用上面公式到普通图像,效果很容易增强太过,毕竟难以找到又有较强雾霾有光照不足的场景。什么图像合适呢?标题已经点明了,HDR图像。V1也就是我前几天说的暗边界,L就是亮边界,三个RGB通道可以共用暗边界,但L要各自计算。此外,hdr的预处理也非常关键,比如进行对数操作,最后要采用非线性归一化操作。
软件EXE下载地址:http://pan.baidu.com/s/1cxKU0u
程序采用python实现,未经性能优化,exe中打包了python及numpy wxpython opencv等重量级模块,故体积较大,如杀毒软件误报为病毒,请信任运行。
下面是python处理代码(没有读取hdr文件部分,参见下一篇博客),只有98行哦
import cv2,wx
import numpy as np
from readHdr import readHdr #readHdr程序代码参见下一遍博客 def zmMinFilterGray(src, r=7): #计算最小值滤波,r是滤波器半径
'''if r <= 0:
return src
h, w = src.shape[:2]
I = src
res = np.minimum(I , I[[0]+range(h-1) , :])
res = np.minimum(res, I[range(1,h)+[h-1], :])
I = res
res = np.minimum(I , I[:, [0]+range(w-1)])
res = np.minimum(res, I[:, range(1,w)+[w-1]])
return zmMinFilterGray(res, r-1)'''
return cv2.erode(src, np.ones((2*r+1, 2*r+1))) def guidedfilter(I, p, r, eps): #引导滤波
height, width = I.shape
m_I = cv2.boxFilter(I, -1, (r,r))
m_p = cv2.boxFilter(p, -1, (r,r))
m_Ip = cv2.boxFilter(I*p, -1, (r,r))
cov_Ip = m_Ip-m_I*m_p m_II = cv2.boxFilter(I*I, -1, (r,r))
var_I = m_II-m_I*m_I a = cov_Ip/(var_I+eps)
b = m_p-a*m_I m_a = cv2.boxFilter(a, -1, (r,r))
m_b = cv2.boxFilter(b, -1, (r,r))
return m_a*I+m_b def stretchImage2(data, vv = 10.0): #非线性拉伸
m = data-data.mean()
S = np.sign(m)
A = np.abs(m)
A = 1.0 - vv**(-A)
m = S*A
vmin, vmax = m.min(), m.max()
return (m-vmin)/(vmax-vmin) def getV1(m, r, eps, ratio): #对所有通道求同样暗边界
tmp = np.min(m,2)
V1 = cv2.blur(zmMinFilterGray(tmp, 7), (7,7))
V1 = guidedfilter(tmp, V1, r, eps)
V1 = np.minimum(V1, tmp)
V1 = np.minimum(V1*ratio, 1.0)
return V1 def getV2(m, r, eps, ratio):
Y = np.zeros(m.shape)
for k in range(3): #对每个通道单独求亮边界
v2 = 1 - cv2.blur(zmMinFilterGray(1-m[:,:,k],7), (7,7))
v2 = guidedfilter(m[:,:,k], v2, r, eps)
v2 = np.maximum(v2, m[:,:,k])
Y[:,:,k] = np.maximum(1-(1-v2)*ratio, 0.0)
return Y def ProcessHdr(m, r, eps, ratio, para1): #单尺度处理
V1 = getV1(m, r, eps, ratio) #计算暗边界
V2 = getV2(m, r, eps, ratio) #计算亮边界
Y = np.zeros(m.shape)
for k in range(3):
Y[:,:,k] = ((m[:,:,k]-V1)/(V2[:,:,k]-V1))
Y = stretchImage2(Y,para1) #非线性拉伸
return Y def ProcessHdrMs(m, r=[161], eps=[0.005,0.001, 0.01], ratio=[0.98, 0.98, 0.92], para1=10.0): #多尺度处理
Y = []
for k in range(len(r)):
Y.append(ProcessHdr(m, r[k], eps[k], ratio[k], para1)) return sum(Y)/len(r) if __name__ == '__main__':
import glob,os.path
for d in ['auto.hdr',]:
m = readHdr(d) #读取dhr文件, readHdr程序代码参见下一遍博客
m1,m2 = m.max(), m.min()
m = (m-m2)/(m1-m2) *255 #数据拉伸到[0,255]
m1 = m[:,:,0].copy(); m[:,:,0] = m[:,:,2]; m[:,:,2]=m1 #颜色通道调整,opencv里R和B反了 m = np.log(m+1)/np.log(256) #log处理
for i in range(2): #如果图像还是很暗,则需要多次log处理
tmp = np.max(m,2)
tmp = guidedfilter(tmp, tmp, 301, 0.01)
th = np.mean(tmp<0.05)
if th < 0.3:
break
m1 = np.log(m*255+1)/np.log(256)
tmp = np.clip(tmp, 0.0, 1.0) ** (0.05) #tmp是权重参数
for k in range(3): #取加权平均
m[:,:,k] = tmp*m[:,:,k] + (1-tmp)*m1[:,:,k] m2 = ProcessHdrMs(m)*255
cv2.imwrite('%s.jpg' % d.split('.')[0], m2)
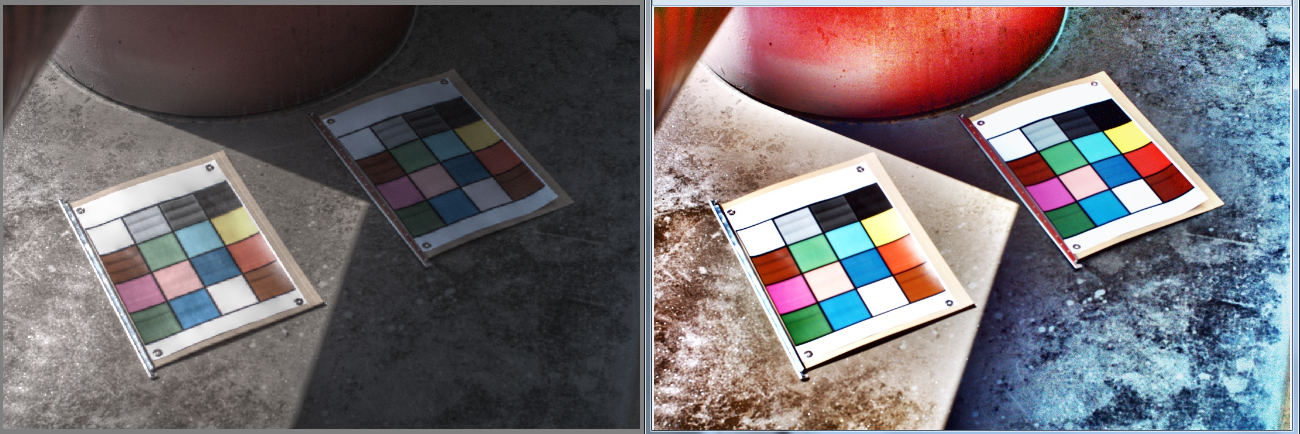
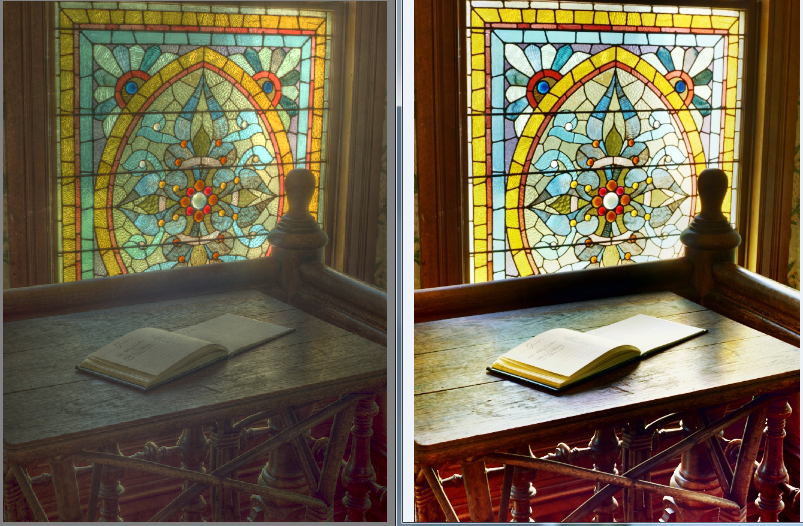
下面上图。左边是Luminance-HDR软件的结果,右边是我的增强结果。







Retinex图像增强和暗通道去雾的关系及其在hdr色调恢复上的应用的更多相关文章
- 暗通道去雾算法的python实现
何凯明博士的去雾文章和算法实现已经漫天飞了,我今天也就不啰里啰唆,直接给出自己python实现的完整版本,全部才60多行代码,简单易懂,并有简要注释,去雾效果也很不错. 在这个python版本中,计算 ...
- retinex图像增强算法的研究
图像增强方面我共研究了Retinex.暗通道去雾.ACE等算法.其实,它们都是共通的.甚至可以说,Retinex和暗通道去雾就是同一个算法的两个不同视角,而ACE算法又是将Retinex和灰度世界等白 ...
- 一种可实时处理 O(1)复杂度图像去雾算法的实现。
在我博文的一系列的文章,有不少算法都于去雾有关,比如限制对比度自适应直方图均衡化算法原理.实现及效果.局部自适应自动色阶/对比度算法在图像增强上的应用这两个增强算法都有一定的去雾能力,而最直接的就是& ...
- 《Single Image Haze Removal Using Dark Channel Prior》一文中图像去雾算法的原理、实现、效果(速度可实时)
最新的效果见 :http://video.sina.com.cn/v/b/124538950-1254492273.html 可处理视频的示例:视频去雾效果 在图像去雾这个领域,几乎没有人不知道< ...
- 基于暗通道优先算法的去雾应用(Matlab/C++)
基于暗通道优先的单幅图像去雾算法(Matlab/C++) 算法原理: 参见论文:Single Image Haze Removal Using Dark Channel Pri ...
- 图像处理之图像增强项目---csdn去雾专栏1
(一)高斯低通滤波去噪 高斯低通滤波器(Gaussian Low Pass Filter)是一类传递函数为高斯函数的线性平滑滤波器.又由于高斯函数是正态分布的密度函数.因此高斯低通滤波器对于去除服从正 ...
- Retinex图像增强算法
前一段时间研究了一下图像增强算法,发现Retinex理论在彩色图像增强.图像去雾.彩色图像恢复方面拥有很好的效果,下面介绍一下我对该算法的理解. Retinex理论 Retinex理论始于Land和M ...
- paper 105: 《Single Image Haze Removal Using Dark Channel Prior》一文中图像去雾算法的原理、实现、效果及其他
在图像去雾这个领域,几乎没有人不知道<Single Image Haze Removal Using Dark Channel Prior>这篇文章,该文是2009年CVPR最佳论文.作者 ...
- paper 100:何恺明经典去雾算法
一:由简至美的最佳论文(作者:何恺明 视觉计算组) [视觉机器人:个人感觉学习他的经典算法固然很重要,但是他的解决问题的思路也是非常值得我们学习的] 那是2009年4月24日的早上,我收到了一封不同 ...
随机推荐
- xss实现获取网站源码
当网站cookie设置了httponly,xss获取不到到网站的cookie.但是我们是可以获取到网站后台的url. 这时候我们可以xss得到网站后台源码,从而找到网站后台的一些敏感操作:添加用户,删 ...
- H、CSL 的拼图 【多维点的交换】 (“新智认知”杯上海高校程序设计竞赛暨第十七届上海大学程序设计春季联赛)
题目传送门:https://ac.nowcoder.com/acm/contest/551/H 题目描述 众所周知 CSL 不仅玩魔方很强,打麻将也很强.今天他打魔法麻将的时候,在路上撞到了一个被打乱 ...
- .net發送郵件
using System; using System.Collections.Generic; using System.Linq; using System.Net.Mail; using Syst ...
- Git打Tag相关操作
一.打标签 git tag -a 0.1.3 -m “Release version 0.1.3″ 详解: git tag 是命令 -a 0.1.3是增加 名为0.1.3的标签 -m 后面跟着的是标签 ...
- PHP导出excel表格
<?php header('Content-Type: application/force-download'); header("Content-type: text/html; c ...
- mysql服务器参数
mysql服务器参数: 配置是从上往下读取,同一个参数项,后边的配置项会覆盖前边的配置项 mysql获取配置信息路径: 命令行参数 mysqld_safe --datadir=/data/sq ...
- Http_load的安装和使用
Http_load的安装和使用 http_load基于linux平台的一种性能测工具.以并行复用的方式运行,用以测试web服务器的吞吐量与负载,测试web页面的性能. 安装: 进入工作目录:#cd / ...
- 两个事务 update同一张表出现的死锁问题 (转载)
引言 近来做省一级计算机一级考试系统的时候,学生端进行大批量判分的时候,出现了这样的问题(事务(进程 ID 262)与另一个进程被死锁在 锁 资源上,并且已被选作死锁牺牲品.请重新运行该事务.): 这 ...
- java SSM 框架 多数据源 代码生成器 websocket即时通讯 shiro redis 后台框架源码
A 调用摄像头拍照,自定义裁剪编辑头像 [新录针对本系统的视频教程,手把手教开发一个模块,快速掌握本系统]B 集成代码生成器 [正反双向](单表.主表.明细表.树形表,开发利器)+快速构建表单; 技 ...
- let与var的区别,为什么什么要用let?
1.var是全局声明,let是块级作用的,只适用于当前代码块 var a = 1: if(true){ let a; a=22: console.log(a);'//22 } if(){}内就是let ...