相机标定 matlab opencv ROS三种方法标定步骤(3)
三 , ROS 环境下 如何进行相机标定
刚开始做到的时候遇到一些问题没有记录下来,现在回头写的时候都是没有错误的结果了,首先使用ROS标定相机,
要知道如何查看节点之间的流程图 rosrun rqt_graph rqt_graph ,如何查看我们运行的节点 rosnode list, 查看运行的话题 rostopic list 或者rostopic list -v 查看每个节点的性质
首先需要学习的是 wiki.ros.org/cv_bridge/Tutorials/UsingCvBridgeToConvertBetweenROSImagesAndOpenCVImages
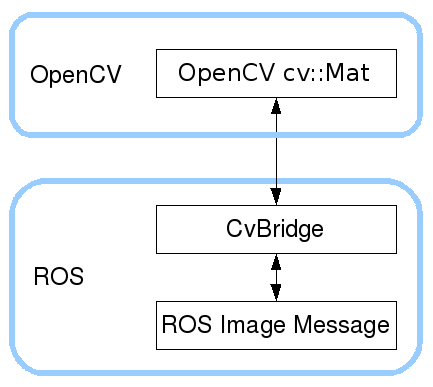
了解cv_bridge 这个程序包是连接ROS和Opencv的程序包,就好像是一个桥梁的作用一样,关系图:
紧接着可以学习 wiki.ros.org/image_common?distro=indigo 这个就是就是教你如何去订阅和发布图像或者视频的话题等问题
那么其中功能最多的就是 wiki.ros.org/image_pipeline?distro=indigo 这个程序包里面就有我们想要的相机标定的程序以及方法
同时最重要的是 要驱动摄像头安装包就在于 wiki.ros.org/image_pipeline?distro=indigo 这里我用的是USB 的就可以对应下载该程序包然后
catkin_make一下就可以驱动摄像头,可以看到原始图像,运行看到的结果:
顺利的启动摄像头就可以学习如何去标定相机了
因为就是用别人的代码也没什么改动,所以直接下载所提及的程序包,然后catkin_make
一般都不会有什么错误出现,命令窗口执行
$ roscore
$ roslaunch usb_cam usb_cam-test.launch (可以在.launch文件里修改要用的摄像头,比如笔记本的摄像头是/dev/video0,外接USB摄像头是/dev/video1)
$ rosrun camera_calibration cameracalibrator.py --size 8x6 --square 0.035 image:=/usb_cam/image_raw camera:=/usb_cam
(这里的标定模板我是用A3纸张打印出来,为8*6 35mm的标定棋盘)
所以 参数要改为与实际标定模板一致的数据 --size 8x6 --square 0.035
image:=/usb_cam/image_raw camera:=/usb_cam 就是要对应USB 摄像头的原始的节点和话题(我就刚开始没有对上号)
(完全按照网上的步骤来是不会出现想要的结果的)
我们可以使用 rosrun rqt_graph rqt_graph 来查看是否calibraton节点是否已经订阅成功如图:(倘若cameracalibrator与usb_cam没有订阅成功,就需要使用
rostopic list -v 查看话题)
运行的结果 如图
直到采集了50个采样点 左边的CALIBRATE变为绿色 就可以点击开始标定,结束后会将标定结果打印到命令窗口:
后续还有很多内容可以写上去,暂时就到这里
(大神请忽略,谢谢)
相机标定 matlab opencv ROS三种方法标定步骤(3)的更多相关文章
- 相机标定 matlab opencv ROS三种方法标定步骤(1)
一 . 理解摄像机模型,网上有很多讲解的十分详细,在这里我只是记录我的整合出来的资料和我的部分理解 计算机视觉领域中常见的三个坐标系:图像坐标系,相机坐标系,世界坐标系,实际上就是要用矩阵来表 示各个 ...
- 相机标定 matlab opencv ROS三种方法标定步骤(2)
二 ubuntu下Opencv的相机标定 一般直接用Opencv的源码就可以进行相机的标定,但是可能只是会实现结果,却不懂实现的过程,我也是模模糊糊的看了<计算机视觉中的多视图几何>以及 ...
- matlab多行注释的三种方法
转自:http://icictech.blog.163.com/blog/static/2797425420084595725499/ 1)方法一 选中你要加注释的内容,然后选择工具菜单"t ...
- 用matlab脚本语言写M文件函数时用三种方法简单实现实现DFT(离散傅里叶变换)
%用二重循环实现DFT: function xk=dt_0(xn); %define a function N=length(xn); %caculate the length of the vari ...
- Matlab中数组元素引用——三种方法
Matlab中数组元素引用——三种方法 1.Matlab中数组元素引用有三种方法 1 2 3 1.下标法(subscripts) 2.索引法(index) 3.布尔法(Boolean) 注意:在使 ...
- MATLAB中多行注释的三种方法
MATLAB中多行注释的三种方法 A. %{ 若干语句 %} B. 多行注释: 选中要注释的若干语句, 编辑器菜单Text->Comment, 或者快捷键Ctrl+R 取消注释: 选中要取消注释 ...
- opencv 3.1.0 访问像素值的三种方法(C++)
三种方法分别问: 指针访问:void colorReduce_ptr(cv::Mat &inputImage, cv::Mat &outputImage, int div); 迭代器访 ...
- opencv图像阈值设置的三种方法
1.简单阈值设置 像素值高于阈值时,给这个像素赋予一个新值(可能是白色),否则我们给它赋予另外一种颜色(也许是黑色).这个函数就是 cv2.threshhold().这个函数的第一个参数就是原图像 ...
- 【Android】Eclipse自动编译NDK/JNI的三种方法
[Android]Eclipse自动编译NDK/JNI的三种方法 SkySeraph Sep. 18th 2014 Email:skyseraph00@163.com 更多精彩请直接访问SkySer ...
随机推荐
- 百度云语音识别,Audio2Txt(c#)
百度云识别没有提供c#版本的sdk,下面给个c#的 1.打开网址http://developer.baidu.com/ 2.登陆 3.管理控制台>开发者服务管理 4.创建工程 5.输入名称,点击 ...
- start running 开始跑步减肥
begin 两个月前,逛超市的时候站在体重秤上称了称,一直以为自己体重很正常(BMI<25,虽然也不轻~~~),结果直接迈过超重,奔着肥胖跑去了(BMI>30,BMI计算器 http:// ...
- 判断UA这种事不能说的太明。
[微博] Mozilla/5.0 (Linux; U; Android 4.2.2; zh-cn; GT-I9502 Build/JDQ39) AppleWebKit/534.30 (KHTML, l ...
- Rotativa 转换html 为pdf时遇到的问题
使用Rotativa,底层使用wkhtmltopdf 组件进行转换,使用过程中也遇到一些问题,记录下:首先,如果页面中有资源文件,需要使用的路径问题,必须使用全路径,http://xxxxx.其次,在 ...
- Make Things Move -- Javascript html5版(一)文件目录结构和工具方法准备
从这一篇开始,就来开始我们的make things move之旅吧 在此之前,要知道ActionScript(AS)的语法和JS是不一样的,AS是相对于JS而言更好的支持了面向对象的特性,所以我们可以 ...
- WINDOWS下安装PHP7出现PHP-CGI无法启动
事情经过:下载PHP 7.0 然后运行,发现php-cgi一直挂掉.启动不起来.我直接到文件夹下启动PHP-CGI 启动, 失败,报错提示:缺失vcruntime140.dll.当时心中暗暗一笑,当年 ...
- IOS 本地通知 UILocalNotification
IOS 本地通知 UILocalNotification [本文章第四部分中的代码逻辑来自网上的借鉴,并非我自己原创] 大概一个月前,我开始跟着做IOS项目了.学习C++,了解Objective-C, ...
- Citrix 服务器虚拟化之四 Xenserver资源池
Citrix 服务器虚拟化之四 Xenserver资源池 台主机,尽管这种限制没有执行.池总是至少有一个物理节点,称为主.只有主节点公开管理界面(使用XenCenter和XenServer命令行界面 ...
- DataOutputStream的writeBytes(String s)
最近,在关于网络请求中有用到DataOutputStraem中的writeBytes()方法,然而就是这个问题,导致了传输中文时就出现问题,着实困扰了很长一段时间. 后来,服务器端同事建议我使用Dat ...
- 在 Cordova/Phonegap for Android 中包含中文文件名的页面
在 Cordova/Phonegap for Android 中包含中文文件名的页面 本贴首发于: http://xuekaiyuan.com/forum.php?mod=viewthread& ...