相机标定 matlab opencv ROS三种方法标定步骤(3)
三 , ROS 环境下 如何进行相机标定
刚开始做到的时候遇到一些问题没有记录下来,现在回头写的时候都是没有错误的结果了,首先使用ROS标定相机,
要知道如何查看节点之间的流程图 rosrun rqt_graph rqt_graph ,如何查看我们运行的节点 rosnode list, 查看运行的话题 rostopic list 或者rostopic list -v 查看每个节点的性质
首先需要学习的是 wiki.ros.org/cv_bridge/Tutorials/UsingCvBridgeToConvertBetweenROSImagesAndOpenCVImages
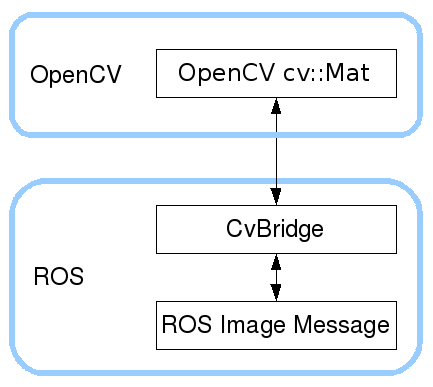
了解cv_bridge 这个程序包是连接ROS和Opencv的程序包,就好像是一个桥梁的作用一样,关系图:
紧接着可以学习 wiki.ros.org/image_common?distro=indigo 这个就是就是教你如何去订阅和发布图像或者视频的话题等问题
那么其中功能最多的就是 wiki.ros.org/image_pipeline?distro=indigo 这个程序包里面就有我们想要的相机标定的程序以及方法
同时最重要的是 要驱动摄像头安装包就在于 wiki.ros.org/image_pipeline?distro=indigo 这里我用的是USB 的就可以对应下载该程序包然后
catkin_make一下就可以驱动摄像头,可以看到原始图像,运行看到的结果:
顺利的启动摄像头就可以学习如何去标定相机了
因为就是用别人的代码也没什么改动,所以直接下载所提及的程序包,然后catkin_make
一般都不会有什么错误出现,命令窗口执行
$ roscore
$ roslaunch usb_cam usb_cam-test.launch (可以在.launch文件里修改要用的摄像头,比如笔记本的摄像头是/dev/video0,外接USB摄像头是/dev/video1)
$ rosrun camera_calibration cameracalibrator.py --size 8x6 --square 0.035 image:=/usb_cam/image_raw camera:=/usb_cam
(这里的标定模板我是用A3纸张打印出来,为8*6 35mm的标定棋盘)
所以 参数要改为与实际标定模板一致的数据 --size 8x6 --square 0.035
image:=/usb_cam/image_raw camera:=/usb_cam 就是要对应USB 摄像头的原始的节点和话题(我就刚开始没有对上号)
(完全按照网上的步骤来是不会出现想要的结果的)
我们可以使用 rosrun rqt_graph rqt_graph 来查看是否calibraton节点是否已经订阅成功如图:(倘若cameracalibrator与usb_cam没有订阅成功,就需要使用
rostopic list -v 查看话题)
运行的结果 如图
直到采集了50个采样点 左边的CALIBRATE变为绿色 就可以点击开始标定,结束后会将标定结果打印到命令窗口:
后续还有很多内容可以写上去,暂时就到这里
(大神请忽略,谢谢)
相机标定 matlab opencv ROS三种方法标定步骤(3)的更多相关文章
- 相机标定 matlab opencv ROS三种方法标定步骤(1)
一 . 理解摄像机模型,网上有很多讲解的十分详细,在这里我只是记录我的整合出来的资料和我的部分理解 计算机视觉领域中常见的三个坐标系:图像坐标系,相机坐标系,世界坐标系,实际上就是要用矩阵来表 示各个 ...
- 相机标定 matlab opencv ROS三种方法标定步骤(2)
二 ubuntu下Opencv的相机标定 一般直接用Opencv的源码就可以进行相机的标定,但是可能只是会实现结果,却不懂实现的过程,我也是模模糊糊的看了<计算机视觉中的多视图几何>以及 ...
- matlab多行注释的三种方法
转自:http://icictech.blog.163.com/blog/static/2797425420084595725499/ 1)方法一 选中你要加注释的内容,然后选择工具菜单"t ...
- 用matlab脚本语言写M文件函数时用三种方法简单实现实现DFT(离散傅里叶变换)
%用二重循环实现DFT: function xk=dt_0(xn); %define a function N=length(xn); %caculate the length of the vari ...
- Matlab中数组元素引用——三种方法
Matlab中数组元素引用——三种方法 1.Matlab中数组元素引用有三种方法 1 2 3 1.下标法(subscripts) 2.索引法(index) 3.布尔法(Boolean) 注意:在使 ...
- MATLAB中多行注释的三种方法
MATLAB中多行注释的三种方法 A. %{ 若干语句 %} B. 多行注释: 选中要注释的若干语句, 编辑器菜单Text->Comment, 或者快捷键Ctrl+R 取消注释: 选中要取消注释 ...
- opencv 3.1.0 访问像素值的三种方法(C++)
三种方法分别问: 指针访问:void colorReduce_ptr(cv::Mat &inputImage, cv::Mat &outputImage, int div); 迭代器访 ...
- opencv图像阈值设置的三种方法
1.简单阈值设置 像素值高于阈值时,给这个像素赋予一个新值(可能是白色),否则我们给它赋予另外一种颜色(也许是黑色).这个函数就是 cv2.threshhold().这个函数的第一个参数就是原图像 ...
- 【Android】Eclipse自动编译NDK/JNI的三种方法
[Android]Eclipse自动编译NDK/JNI的三种方法 SkySeraph Sep. 18th 2014 Email:skyseraph00@163.com 更多精彩请直接访问SkySer ...
随机推荐
- 基于SQLite日志记录工具--Log4W
最近压迫自己写点自己的东西,但是水平不高,槽点多,望各位请轻喷,嘿嘿! 以前用过一个Log4Net的东东,但是保存的是文本文件,不好过滤,而且用的不多,也不太熟悉,所以自己也当写一个练练手吧! ...
- tomcat安装和基本配置
首先,默认电脑上已经配置好java环境. 在http://tomcat.apache.org/这里下载tomcat二进制版本,下载到本地后随意解压在某个盘, 我解压在D:\apache-tomcat- ...
- 自定义的UIAlertView不能在iOS7上正常显示
众所周知,当伟大的iOS7系统发布后,表扬的一堆.谩骂的也一片,而对于我们程序员来说最关心的莫过于低版本系统上的程序在搞版本系统上的兼容性问题了. 在iOS6.1几之前,当我们想要做一些提醒用户或临时 ...
- struts2图片显示
struts2图片显示即是文件下载 一.配置struts.xml struts.xml中配置stream结果类型,并配置contentType.inputName.contentDisposition ...
- Dynamic CRM 2013 on Windows Azure VM
三个A2 Size的VM,运行Windows Server 2012: AD Server,SQL Server,App Server 将AD Server的ip地址填写到Windows Azure虚 ...
- PHP:执行模型和内存模型
PHP:执行模型和内存模型 背景 对于任何一种语言,了解其执行模型和内存模型都是有意义的,本文中的内容不见得正确,请多批评. 执行模型 每个请求都是一个独立的PHP进程,两个请求之间会完全隔离,会话和 ...
- MFC中菜单变灰的问题
MFC中菜单变灰 方法1:有UpdateCmdUI句柄时 定义一个BOOL变量m_b来标志菜单项是否有效, 该菜单项响应UPDATE_COMMAND_UI消息,在消息处理函数中pCmdUI->E ...
- 为什么MD5不能解密
MD5加密原理是散列算法,也称之为hash算法. 具体的算法很多种,我也不是很懂,写得太专业了,我们只能理解一些简单的.简单才能让人记得住. 举例说明,10除以3余数是1,4除以3的余数也是1,反过来 ...
- hdu1205(类似 分布垃圾数列)
Problem Description A Fibonacci sequence is calculated by adding the previous two members the sequen ...
- Android 性能优化——内存篇
一.android官方一些内存方面的内存tips 1.避免创建不必要的对象. 如尽量避免字符串的加号拼接,可以使用StringBuilder来拼接. 如果需要TextView设置多个字符串片段,可以使 ...