J20航模遥控器开源项目系列教程(七)PPM输出 | 关于按键版本和旋转编码器版本的兼容说明、布局建议 | 关于MINI版PCB的兼容说明

我们的开源宗旨:自由 协调 开放 合作 共享
拥抱开源,丰富国内开源生态,开展多人运动,欢迎加入我们哈~
和一群志同道合的人,做自己所热爱的事!
项目开源地址:https://github.com/J20RC/STM32_RC_Transmitter
码云(Gitee)地址:https://gitee.com/J20RC
QQ交流群:1091996634 【密码:J20】
1.遥控器的PPM输出
PPM输出是什么?能做什么?
笔者在这篇文章中详细汇总了PPM协议 https://www.cnblogs.com/cai-zi/p/14110204.html,感兴趣的小伙伴可以前往查看哈~
比如遥控器接电脑玩模拟器,比如用PPM连接高频头来增加遥控距离,当然还有我们玩多轴,要将接收机的信号传输给飞控时,每个通道一组物理连线的方式就显得非常的繁琐和没有必要。这时候就要用到PPM了。

如何制作PPM输出引脚?
从2.2版本的固件起,J20航模遥控器开始支持PPM输出(固件下载:https://gitee.com/J20RC/STM32_RC_Transmitter/releases/2.2)
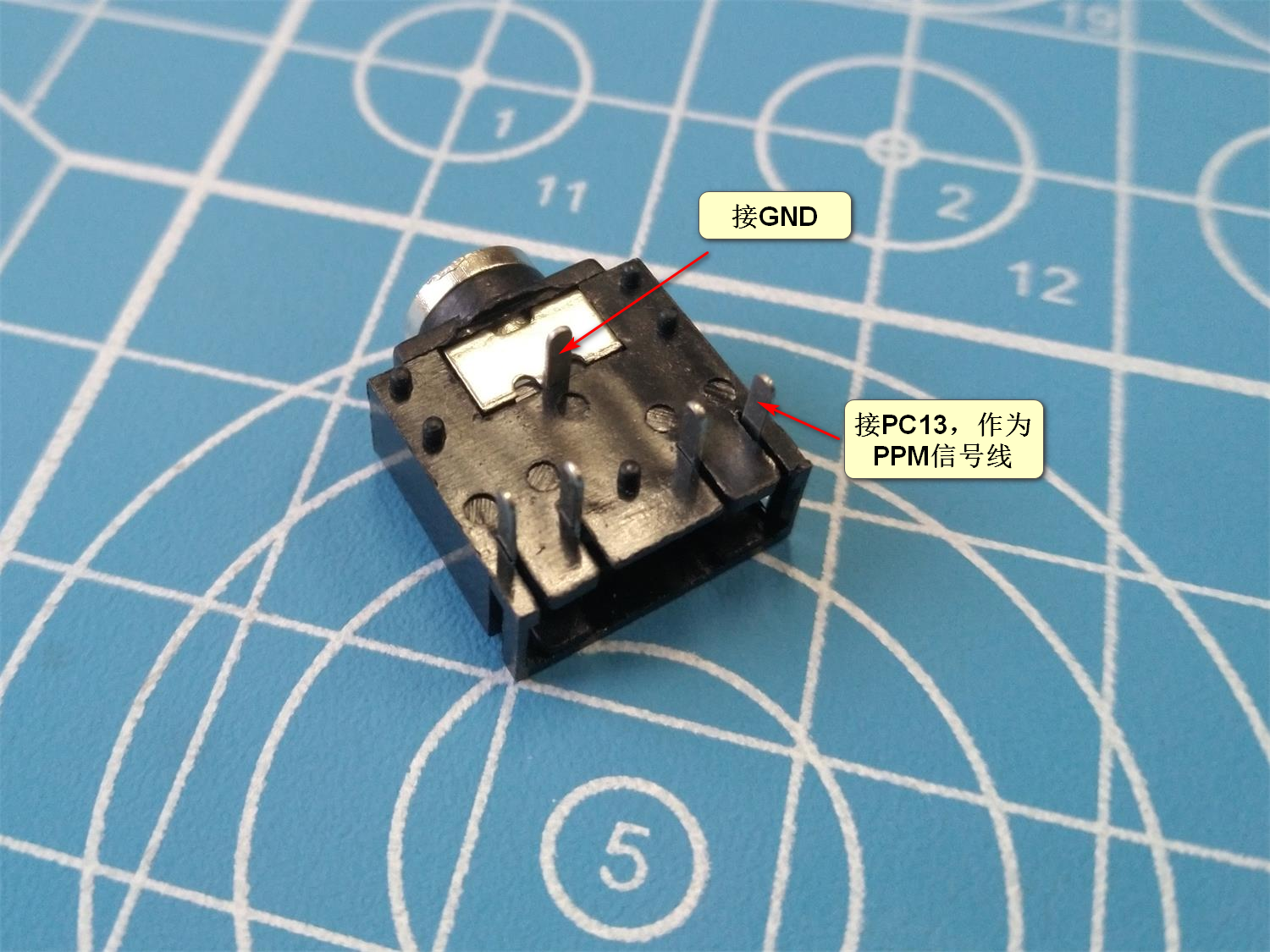
PPM输出只需GND和信号线即可,信号线接在PC13引脚,可使用3.5mm耳机插座进行安装。


温馨提醒:
由于PPM输出是最高优先级中断,不使用时请关闭【输出设置>>PPM输出】)。
2.按键版本、旋转编码器版本的制作指南
从2.2版本的固件起,J20航模遥控器同时发布按键和EC11旋转编码器两个版本(固件下载:https://gitee.com/J20RC/STM32_RC_Transmitter/releases/2.2)
2.1旋转编码器版本
keil5源代码工程默认适配EC11旋转编码器版本,如果您想使用按键版本:
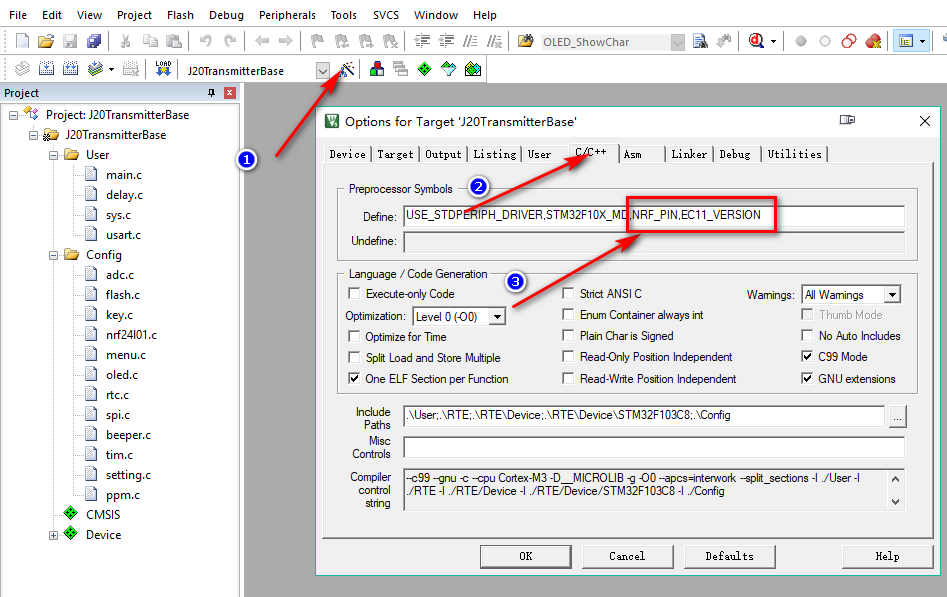
请在Keil5中打开工程后,点击魔法棒(Options for Target...)
点击选项栏 C/C++ >> Preprocessor Symbols 的define文本框中删除 EC11_VERSION 即可。
六个按键定义:
1 CH1Left 接PB5 【home】
2 CH1Right接PB4
3 CH2Down 接PB3 【确定】
4 CH2Up 接PA15 【返回】
5 CH4Left 接PA12 【数值-】
6 CH4Right接PA11 【数值+】
旋转编码器模块:
GND 电源地
VCC 接3.3V电源
SW 接PB11
DT 接PB10
CLK 接PB1
短按旋转编码器进入菜单,长按旋转编码器/短按CH1Left键退出菜单。
旋转编码器版本布局建议:

2.2按键版本
七个按键定义:
1 CH1Left 接PB5 【确定】
2 CH1Right接PB4 【返回】
3 CH2Down 接PB3 【菜单向下】
4 CH2Up 接PA15 【菜单向上】
5 CH4Left 接PA12 【数值-】
6 CH4Right接PA11 【数值+】
7 MENU 接PB11 【菜单】
短按MENU键进入/退出菜单,CH2Down键和CH2Up键轮询菜单。
按键版本布局建议:

3.关于兼容MINI版PCB的说明
基础版遥控器mini板PCB 1.0版本的CSN/CE/IRQ连线与之后的版本不同,工程默认适配2.0版本PCB。
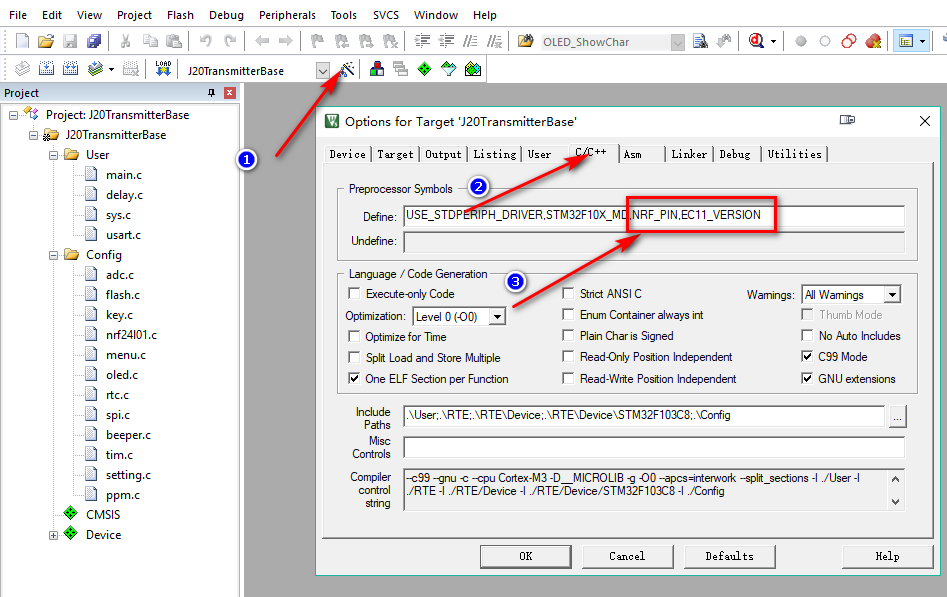
如果您使用的是1.0版本PCB,请在Keil5中打开工程后,点击魔法棒(Options for Target...)
点击选项栏 C/C++ >> Preprocessor Symbols 的define文本框中删除 NRF_PIN 即可。
mini板PCB 1.0版本 无线模块与STM32的连接:
NRF24L01模块:
GND 电源地
VCC 接3.3V电源
CSN 接PA8
SCK 接PB13
MISO 接PB14
MOSI 接PB15
CE 接PA9
IRQ 接PB12mini板PCB 2.0版本 无线模块与STM32的连接(调换了CSN/CE/IRQ):
NRF24L01模块:
GND 电源地
VCC 接3.3V电源
CSN 接PB12
SCK 接PB13
MISO 接PB14
MOSI 接PB15
CE 接PA8
IRQ 接PA9
写在最后
首先感谢项目中所有的贡献者!(截止2020.12.21)
* 蔡子CaiZi(B站up主) https://space.bilibili.com/349576976
* A-XIN;
* 小何;
* ZL_Studio(B站up主)https://space.bilibili.com/364251289
* 王天天@WangTiantian139 https://wangtiantian139.github.io/
* 刘桶桶;
* 简繁;
* 王博;
* 与非门;
* Talons;
* 大米粥;
* P a S S ||;
* 佚名;
* 小吴;
* xuech007;特别感谢正点原子提供的STM32例程和开源社区http://www.openedv.com/
QQ交流群:1091996634 【密码:J20】
J20航模遥控器开源项目系列教程(七)PPM输出 | 关于按键版本和旋转编码器版本的兼容说明、布局建议 | 关于MINI版PCB的兼容说明的更多相关文章
- J20航模遥控器开源项目系列教程(一)制作教程 | 基础版V1.0发布,从0到1
我们的开源宗旨:自由 协调 开放 合作 共享 拥抱开源,丰富国内开源生态,开展多人运动,欢迎加入我们哈~ 和一群志同道合的人,做自己所热爱的事! 项目开源地址:https://github.com/C ...
- J20航模遥控器开源项目系列教程(五)| 制作STM32F0接收机,8路PWM输出,SBUS输出,PPM输出 | 加密狗无线化,畅玩飞行模拟器
我们的开源宗旨:自由 协调 开放 合作 共享 拥抱开源,丰富国内开源生态,开展多人运动,欢迎加入我们哈~ 和一群志同道合的人,做自己所热爱的事! 项目开源地址:https://github.com/J ...
- J20航模遥控器开源项目系列教程(二)使用说明 | 遥控器制作完成了,怎么用?
我们的开源宗旨:自由 协调 开放 合作 共享 拥抱开源,丰富国内开源生态,开展多人运动,欢迎加入我们哈~ 和一群志同道合的人,做自己所热爱的事! 项目开源地址:https://github.com/C ...
- J20航模遥控器开源项目系列教程(三)开发说明 | 想要自己改造程序,扩充功能,怎么实现?
我们的开源宗旨:自由 协调 开放 合作 共享 拥抱开源,丰富国内开源生态,开展多人运动,欢迎加入我们哈~ 和一群志同道合的人,做自己所热爱的事! 项目开源地址:https://github.com/C ...
- J20航模遥控器开源项目系列教程(六)亚克力外壳制作
我们的开源宗旨:自由 协调 开放 合作 共享 拥抱开源,丰富国内开源生态,开展多人运动,欢迎加入我们哈~ 和一群志同道合的人,做自己所热爱的事! 项目开源地址:https://github.com/J ...
- J20航模遥控器开源项目系列教程(四)PCB打印 | 嘉立创PCB下单教程,5元顺丰包邮解君愁!
我们的开源宗旨:自由 协调 开放 合作 共享 拥抱开源,丰富国内开源生态,开展多人运动,欢迎加入我们哈~ 和一群志同道合的人,做自己所热爱的事! 项目开源地址:https://github.com/J ...
- 致敬学长!J20航模遥控器开源项目计划【开局篇】 | 先做一个开机界面 | MATLAB图像二值化 | Img2Lcd图片取模 | OLED显示图片
我们的开源宗旨:自由 协调 开放 合作 共享 拥抱开源,丰富国内开源生态,开展多人运动,欢迎加入我们哈~ 和一群志同道合的人,做自己所热爱的事! 项目开源地址:https://github.com/C ...
- ABP框架搭建项目系列教程基础版完结篇
返回总目录<一步一步使用ABP框架搭建正式项目系列教程> 经过前面十二篇的基础教程,现在终于该做个总结了. 回顾 第一篇,我们建议新手朋友们先通过ABP官网的启动模板生成解决方案,因为这样 ...
- webpack4 系列教程(七): SCSS提取和懒加载
教程所示图片使用的是 github 仓库图片,网速过慢的朋友请移步>>> (原文)webpack4 系列教程(七): SCSS 提取和懒加载. 个人技术小站: https://god ...
随机推荐
- Solution -「NWRRC 2017」「洛谷 P7024」Fygon 2.0
\(\mathcal{Description}\) Link. 给定一个无并列语句的多重循环,每个变量取值的左端点只能是 \(1\) 或已定义的变量:右端点只能是 \(n\) 或已定义的变量. ...
- 《深度探索C++对象模型》第一章 | 关于对象
C++对象模式 非静态数据成员放置在每个类对象内,静态数据成员则被放置在所有类对象之外.静态和非静态的成员函数也被放置在所有类对象之外.每个类产生一堆指向虚函数的指针,放在虚表(vtbl)中.每个类对 ...
- Spring中的Environment外部化配置管理详解
Environment的中文意思是环境,它表示整个spring应用运行时的环境信息,它包含两个关键因素 profiles properties profiles profiles这个概念相信大家都已经 ...
- CPU、进程、线程原理
巨人的肩膀 看完这篇还不懂高并发中的线程与线程池你来打我 (qq.com)
- [LeetCode]1470. 重新排列数组
给你一个数组 nums ,数组中有 2n 个元素,按 [x1,x2,...,xn,y1,y2,...,yn] 的格式排列. 请你将数组按 [x1,y1,x2,y2,...,xn,yn] 格式重新排列, ...
- HDFS免重启挂载新磁盘
背景 在生产环境中,集群节点磁盘大小不同,其使用率也会不同,HDFS虽有均衡策略,但也会有数据不平衡的情况,有些节点磁盘就会被打满,然后这个节点就不健康了(Unhealthy Nodes),Yarn的 ...
- GMP
目录 GMP 含义 模型 状态汇总 G状态 P的状态 M的状态 调度场景 总结 GMP 含义 Goroutine的并发编程模型基于GMP模型,简要解释一下GMP的含义: G:表示goroutine,每 ...
- nessus安装破解
Nessus2.0-20211012插件包 Nessus-8.15.2-x64.msi 0x01 Nessus更新介绍 Nessus下载地址 1https://www.tenable.com/down ...
- [题解]RQNOJ PID85 三个袋子
链接:http://www.rqnoj.cn/problem/85 思路:一个排列问题,递推式很简单,f(n+1)=3*f(n)-1 ,由此可以推出通项公式,f(n)=0.5*3^(n-1)+0.5 ...
- [旧][Android] Retrofit 初步使用
备注 原发表于2016.04.13,资料已过时,仅作备份,谨慎参考 Retrofit 是什么? Retrofit is a type-safe HTTP client for Android and ...