P3376 【模板】网络最大流( Edmonds-krap、Dinic、ISAP 算法)
P3376 【模板】网络最大流( Edmonds-krap、Dinic、ISAP 算法)
题目描述 如题,给出一个网络图,以及其源点和汇点,求出其网络最大流。
输入格式 第一行包含四个正整数N、M、S、T,分别表示点的个数、有向边的个数、源点序号、汇点序号。
接下来M行每行包含三个正整数ui、vi、wi,表示第i条有向边从ui出发,到达vi,边权为wi(即该边最大流量为wi)
输出格式 一行,包含一个正整数,即为该网络的最大流。
输入输出样例
输入 #1 复制
4 5 4 3
4 2 30
4 3 20
2 3 20
2 1 30
1 3 40
输出 #1 复制
50
说明/提示
时空限制:1000ms,128M
数据规模:
对于30%的数据:N<=10,M<=25
对于70%的数据:N<=200,M<=1000
对于100%的数据:N<=10000,M<=100000
样例说明:
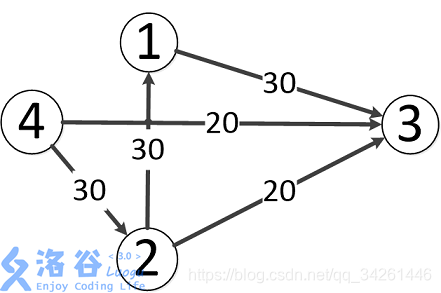
题目中存在3条路径:
4–>2–>3,该路线可通过20的流量
4–>3,可通过20的流量
4–>2–>1–>3,可通过10的流量(边4–>2之前已经耗费了20的流量)
故流量总计20+20+10=50。输出50。
思路
最大流板子。。。。
大佬博客传送门1
传送门2
传送门3
传说门4
题解一(Edmonds-krap)
#include<iostream>
#include<cstring>
#include<queue>
using namespace std;
#define INF 0x3f3f3f3f
const int maxn = 10005;
const int maxm = 300005;
int n,m,s,e;
struct Edge
{
int u,v,next;
int cap,flow;
} edge[2*maxm];
int head[2*maxm];
int k = -1;
void Add(int u, int v, int w)
{
edge[++ k] = (Edge){ u, v, head[u], w, 0};
head[u] = k;
edge[++ k] = (Edge){ v, u, head[v], 0, 0};
head[v] = k;
}
int flag = 0; //flag == 0 表示还能找到增广路
int bfs(int s, int e)
{
int min_flow[maxn]; //min_flow[i] 表示到达第 i 号节点时,之前所有的路径中 最小的 边的流量cap - 已经流过的流量flow
int pre[maxm]; //记录增光路时,当前节点是由那个那条边找到的,这样在找到增光路之后,我们可以根据 pre[] 数组回推其他 组成该增光路的边
memset(min_flow, 0, sizeof(min_flow)); //min_flow[i] == 0 表示之前没有走过 i 节点
min_flow[s] = INF;
pre[s] = -1;
queue<int> q;
q.push(s);
int u,v,flow;
while(! q.empty())
{
u = q.front(); q.pop();
for(int i = head[u]; i != -1; i = edge[i].next)
{
v = edge[i].v;
flow = edge[i].cap - edge[i].flow;
if(flow > 0 && ! min_flow[v]) //所走的这条边还有 剩余的空间cap,并且该节点还没有被走过。。
{
pre[v] = i;
min_flow[v] = min(min_flow[u], flow);
q.push(v);
}
}
if(min_flow[e])
break;
}
if(! min_flow[e]) //一只到更新结束,终点到最小增加值还是等于0,那么说从起点到终点已经没有增广路了
flag = 1;
//这一点千万不要忘,,,,把用过的水流在这条增光路上都减去。。。。
for(int j = e; pre[j] != -1; j = edge[pre[j]].u)
{
edge[pre[j]].flow += min_flow[e];
edge[pre[e]^1].flow -= min_flow[e];
}
return min_flow[e]; //返回最小增加值到 答案中
}
int max_flow()
{
int mx_flw = 0;
while(1)
{
mx_flw += bfs(s, e);
if(flag)
break;
}
return mx_flw;
}
void init()
{
memset(head, -1, sizeof(head));
k = -1;
}
int main()
{
ios::sync_with_stdio(false); cin.tie(nullptr);
//freopen("T.txt","r",stdin);
cin >> n >> m >> s >> e;
init();
int u,v,w;
for(int i = 1; i <= m; i ++)
{
cin >> u >> v >> w;
Add(u, v, w);
}
cout << max_flow() << endl;
return 0;
}
题解二(Dinic)
#include<iostream>
#include<cstring>
#include<queue>
#include<algorithm>
using namespace std;
#define INF 1e9
#define ll long long
const int maxn = 100005;
const int maxm = 150000;
int n,m;
struct Edge
{
int v;
ll w;
int next;
} edge[maxm];
int head[maxn], cur[maxn];
int deep[maxn];
int k;
void Add(int u, int v, ll w)
{
edge[++ k] = (Edge){ v, w, head[u]};
head[u] = k;
edge[++ k] = (Edge){ u, 0, head[v]};
head[v] = k;
}
//bfs 为图分层
bool bfs(int s, int e)
{
memset(deep, 0x7f, sizeof(deep));
for(int i = 1; i <= n; i ++) cur[i] = head[i];
deep[s] = 0;
queue<int> q;
q.push(s);
int u,v;
ll w;
while(! q.empty())
{
u = q.front(); q.pop();
for(int i = head[u]; i != -1; i = edge[i].next)
{
v = edge[i].v;
w = edge[i].w;
if(w && deep[v] > INF)
{
deep[v] = deep[u] + 1;
q.push(v);
}
}
}
if(deep[e] >= INF)
return false;
return true;
}
//dfs 一次找多条增光路(相当于找了一个增广网。。)
ll dfs(int now, int e, ll limit)
{
if(! limit || now == e) return limit;
ll flow = 0, f;
for(int i = cur[now]; i != -1; i = edge[i].next)
{
cur[now] = i; //千万注意这一步的意思啊。。这一步是因为 dfs的特性是每次增广一定是增广,那么下一次就不必再检查它了,而直接看第一个未被检查的边
if(deep[edge[i].v] == deep[now] + 1 && (f = dfs(edge[i].v, e, min(limit, edge[i].w))))
{
flow += f;
limit -= f;
edge[i].w -= f;
edge[i^1].w += f;
if(! limit)
break;
}
}
return flow;
}
ll Dinic(int s, int e)
{
ll mx_flw = 0;
while(bfs(s, e))
mx_flw += dfs(s, e, INF);
return mx_flw;
}
void init()
{
k = -1;
memset(head, -1, sizeof(head));
}
int main()
{
ios::sync_with_stdio(false); cin.tie(0);
//freopen("T.txt","r",stdin);
int s,e;
cin >> n >> m >> s >> e;
init();
int u,v;
ll w;
for(int i = 1; i <= m; i ++)
cin >> u >> v >> w, Add(u, v, w);
cout << Dinic(s, e);
return 0;
}
题解三(ISAP)
#include<iostream>
#include<algorithm>
#include<queue>
#include<cstring>
using namespace std;
#define INF 1e9
const int maxn = 10005;
const int maxm = 200005;
int n, m, s, e;
int k;
struct Edge
{
int v,w,next;
} edge[2 * maxm];
int head[maxn],cur[maxn],deep[maxn];
int last[maxm];
int num[maxm]; // num 桶,用来统计每个分层的节点的数量
void Add(int u, int v, int w)
{
edge[++ k] = (Edge){ v, w, head[u]};
head[u] = k;
edge[++ k] = (Edge){ u, 0, head[v]};
head[v] = k;
}
//bfs 用于更新deep层
void bfs(int e)
{
// for(int i = 0; i <= n; i ++)
// cur[i] = head[i], deep[i] = n;
for(int i = 0; i <= m; i ++) cur[i] = head[i];
for(int i = 1; i <= n; i ++) deep[i] = n;
deep[e] = 0;
queue<int> q;
q.push(e);
int u, v, w;
while(! q.empty())
{
u = q.front(); q.pop();
for(int i = head[u]; i != -1; i = edge[i].next)
{
v = edge[i].v;
if(edge[i^1].w && deep[v] == n) //正图 边存在 且 v这个节点没有被求过
{
deep[v] = deep[u] + 1;
q.push(v);
}
}
}
}
int Add_flow(int s, int e)
{
int ans = INF;
int now = e;
while(now != s)
{
ans = min(ans, edge[last[now]].w);
now = edge[last[now]^1].v;
}
now = e;
while(now != s)
{
edge[last[now]].w -= ans;
edge[last[now]^1].w += ans;
now = edge[last[now]^1].v;
}
return ans;
}
int isap(int s, int e)
{
int now = s; //从起点开始进行操作
bfs(e); //先找出来一条边 被操作的增光路
for(int i = 1; i <= n; i ++) num[deep[i]] ++;
int mx_flw = 0;
while(deep[s] < n)
{
if(now == e) //如果到达汇点直接增广,重新回到源点进行下一轮增广
{
mx_flw += Add_flow(s, e);
now = s;
}
bool has_find = 0;
for(int i = cur[now]; i != -1; i = edge[i].next)
{
if(edge[i].w && deep[now] == deep[edge[i].v] + 1)
{
has_find = 1; //做标记已经找到一种可行路径
cur[now] = i; //优化当前弧
now = edge[i].v;
last[edge[i].v] = i;
break;
}
}
if(! has_find)
{
int minn = n - 1;
for(int i = head[now]; i != -1; i = edge[i].next)
if(edge[i].w)
minn = min(minn, deep[edge[i].v]);
if( (-- num[deep[now]]) == 0) break; //gap 优化出现了断层
num[deep[now] = minn + 1] ++;
cur[now] = head[now];
if(now != s)
now = edge[last[now]^1].v;
}
}
return mx_flw;
}
void init()
{
k = -1;
memset(head, -1, sizeof(head));
}
int main()
{
ios::sync_with_stdio(false); cin.tie(0);
//freopen("T.txt","r",stdin);
cin >> n >> m >> s >> e;
init();
int u,v,w;
for(int i = 1; i <= m; i ++)
cin >> u >> v >> w, Add(u, v, w);
cout << isap(s, e);
return 0;
}
P3376 【模板】网络最大流( Edmonds-krap、Dinic、ISAP 算法)的更多相关文章
- P3376 [模板] 网络最大流
https://www.luogu.org/blog/ONE-PIECE/wang-lao-liu-jiang-xie-zhi-dinic EK 292ms #include <bits/std ...
- 【洛谷 p3376】模板-网络最大流(图论)
题目:给出一个网络图,以及其源点和汇点,求出其网络最大流. 解法:网络流Dinic算法. 1 #include<cstdio> 2 #include<cstdlib> 3 #i ...
- 图论算法-网络最大流【EK;Dinic】
图论算法-网络最大流模板[EK;Dinic] EK模板 每次找出增广后残量网络中的最小残量增加流量 const int inf=1e9; int n,m,s,t; struct node{int v, ...
- 「模板」网络最大流 FF && EK && Dinic && SAP && ISAP
话不多说上代码. Ford-Fulkerson(FF) #include <algorithm> #include <climits> #include <cstdio& ...
- 【Luogu P3376】网络最大流
Luogu P3376 最大流是网络流模型的一个基础问题. 网络流模型就是一种特殊的有向图. 概念: 源点:提供流的节点(入度为0),类比成为一个无限放水的水厂 汇点:接受流的节点(出度为0),类比成 ...
- [模板]网络最大流 & 最小费用最大流
我的作业部落有学习资料 可学的知识点 Dinic 模板 #define rg register #define _ 10001 #define INF 2147483647 #define min(x ...
- CQOI2016 不同的最小割 (最小割树模板)(等价流树的Gusfield构造算法)
题目 最小割树模板 算法详解及证明见: 2016年国家队候选队员论文 <浅谈无向图最小割问题的一些算法及应用--绍兴一中 王文涛> 3.2节 CODE #include <bits/ ...
- 网络最大流算法—EK算法
前言 EK算法是求网络最大流的最基础的算法,也是比较好理解的一种算法,利用它可以解决绝大多数最大流问题. 但是受到时间复杂度的限制,这种算法常常有TLE的风险 思想 还记得我们在介绍最大流的时候提到的 ...
- P3376 【模板】网络最大流dinic算法
P3376 [模板]网络最大流 题目描述 如题,给出一个网络图,以及其源点和汇点,求出其网络最大流. 输入输出格式 输入格式: 第一行包含四个正整数N.M.S.T,分别表示点的个数.有向边的个数.源点 ...
随机推荐
- HDFS 客户端读写操作详情
1. 写操作 客户端向namenode发起上传请求 namenode检查datanode是否已经存有该文件,并且检查客户端的权限 确认可以上传后,根据文件块数返回datanode栈 注:namenod ...
- openwrt 为软件包添加服务
手动修改 rc.local 加入也可以实现自启动,缺点手动修改太麻烦,停止只能用 kill . 配置成服务最方便了,可以启用或禁用,启动,停止,重启非常方便. 在openwrt 中使用服务 servi ...
- 【音视频连载-001】基础学习篇- SDL 介绍以及工程配置
技术开发故事会连载 这是音视频基础学习系列的第一篇文章,主要讲解 SDL 是什么以及为什么要用到它,看似和音视频没啥卵关系,其实必不可少. SDL 简介 SDL 是 "Simple Dire ...
- 用shell脚本实现定时备份数据库
1.备份数据库的方法 可以使用命令查看 ls /usr/local/mysql/bin 这个mysqldump就是系统内置的用来备份数据库的工具. 2.实现方法 ①先随便进入一个位置创建一个目录 ② ...
- Markdown怎么使用制表符TAB键?为什么TAB失灵了?
目录 问题描述 解决办法 问题描述 我们写文章(Markdown文章)的时候,经常想使用自然段标记划分段落,可是我们会发现,不管是任何编辑器,tab键都没有用,怎么办? 解决办法 语法: 文章- ...
- (转)浅析epoll – epoll函数深入讲解
原文地址:http://www.cppfans.org/1418.html 浅析epoll – epoll函数深入讲解 前一篇大致讲了一下epoll是个什么东西,优点等内容,这篇延续上一篇的内容,主要 ...
- go源码分析(二) 使用go http包开发web时遇到的坑之重复注册Handle路由
我们使用Handle注册http时 如果添加两行,即重复注册函数. http.HandleFunc("/",index) http.HandleFunc("/" ...
- iview Checkbox 多选框 单个的时候 如果需要change 以后进行赋值 就要用value 不要用v-modal 然后用updateModel 方法
noSuchSituationSetFalse () { this.noSuchSituationOne = false this.$refs.noSuchSituationRef.updateMod ...
- 单选框 改成 复选框 的css样式
fillEditorFakeTable.less /* add for the global title checkbox fake */ .fake-checkbox { display: inli ...
- 常用的 Git 命令与场景
Git 分布式版本控制系统 它拥有完整的版本控制功能,能够解决多人协作的问题 将自己的代码同步到 Github 上能够提升开发效率 git 会记录你每一次的版本修改操作 常用的 Git 操作 # 指定 ...