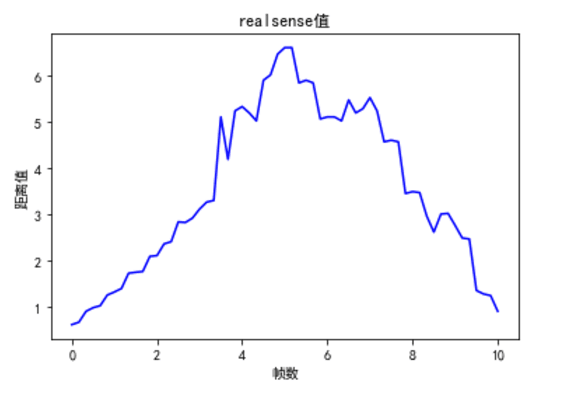
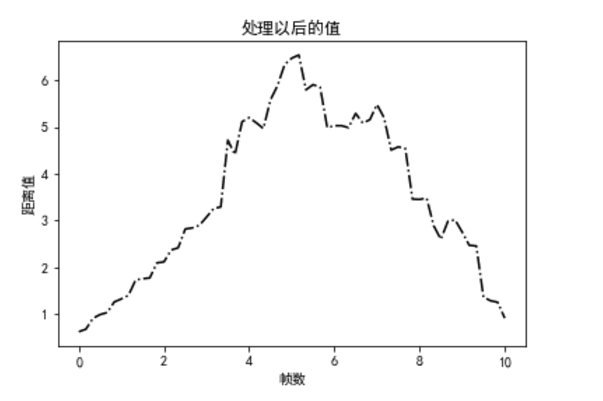
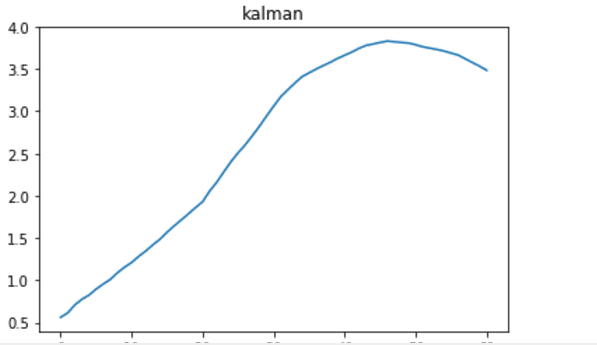
kalman处理realsense数据
代码来自:https://www.cnblogs.com/zjuhjm/archive/2012/12/29/2838472.html
import numpy as np
import matplotlib.pyplot as plt
Q = 0.00001
R = 0.1
P_k_k1 = 1
Kg = 0
P_k1_k1 = 1
x_k_k1 = 0
ADC_OLD_Value = 0
kalman_adc_old = 0
def kalman(ADC_Value):
global kalman_adc_old
global P_k1_k1
Z_k = ADC_Value
if (abs(kalman_adc_old-ADC_Value)>=30):
x_k1_k1= ADC_Value*0.382 + kalman_adc_old*0.618
else:
x_k1_k1 = kalman_adc_old;
x_k_k1 = x_k1_k1
P_k_k1 = P_k1_k1 + Q
Kg = P_k_k1/(P_k_k1 + R)
kalman_adc = x_k_k1 + Kg * (Z_k - kalman_adc_old)
P_k1_k1 = (1 - Kg)*P_k_k1
P_k_k1 = P_k1_k1
ADC_OLD_Value = ADC_Value
kalman_adc_old = kalman_adc
return kalman_adc
a= [100]*200
array = np.array(a)
s = np.random.normal(0, 25, 200)
#test_array = array + s
test_array = [0.618,0.672,0.905,0.985,1.028,1.255,1.320,1.396,1.724,1.753,1.769,2.091,2.113,2.367,2.414,2.817,2.840,2.897,3.073,3.254,3.289,4.717,4.407,5.113,5.200,5.091,4.967,5.580,5.888,6.338,6.473,6.542,5.795,5.907,5.850,4.987,5.028,5.028,4.987,5.291,5.084,5.156,5.481,5.200,4.507,4.575,4.541,3.457,3.450,3.477,2.884,2.596,2.983,3.012,2.753,2.468,2.453,1.358,1.281,1.249,0.908]
plt.plot(test_array)
adc=[]
for i in range(len(test_array)):
adc.append(kalman(test_array[i]))
plt.plot(adc)
plt.title('kalman')
#plt.plot(array)
kalman处理realsense数据的更多相关文章
- [stm32] MPU6050 HMC5883 Kalman 融合算法移植
一.卡尔曼滤波九轴融合算法stm32尝试 1.Kalman滤波文件[.h已经封装为结构体] /* Copyright (C) 2012 Kristian Lauszus, TKJ Electronic ...
- 【滤波】标量Kalman滤波的过程分析和证明及C实现
摘要: 标量Kalman滤波的过程分析和证明及C实现,希望能够帮助入门的小白,同时得到各位高手的指教.并不涉及其他Kalman滤波方法. 本文主要参考自<A Introduction to th ...
- 理解Kalman滤波的使用
Kalman滤波简介 Kalman滤波是一种线性滤波与预测方法,原文为:A New Approach to Linear Filtering and Prediction Problems.文章推导很 ...
- 卡尔曼滤波器 Kalman Filter (转载)
在学习卡尔曼滤波器之前,首先看看为什么叫“卡尔曼”.跟其他著名的理论(例如傅立叶变换,泰勒级数等等)一样,卡尔曼也是一个人的名字,而跟他们不同的是,他是个现代人! 卡 尔曼全名Rudolf Emil ...
- 【转】Intel RealSense(实感技术)概览
Intel RealSense(实感技术)概览 1 Reply 版权声明:本文系本站作者自己翻译整理,欢迎转载,但转载请以超链接形式注明文章来源(planckscale.info).作者信息和本声明, ...
- 学习OpenCV——Kalman滤波
背景: 卡尔曼滤波是一种高效率的递归滤波器(自回归滤波器), 它能够从一系列的不完全及包含噪声的测量中,估计动态系统的状态.卡尔曼滤波的一个典型实例是从一组有限的,包含噪声的,对物体位置的观察序列(可 ...
- 卡尔曼滤波—Simple Kalman Filter for 2D tracking with OpenCV
之前有关卡尔曼滤波的例子都比较简单,只能用于简单的理解卡尔曼滤波的基本步骤.现在让我们来看看卡尔曼滤波在实际中到底能做些什么吧.这里有一个使用卡尔曼滤波在窗口内跟踪鼠标移动的例子,原作者主页:http ...
- Realsense 提取彩色和深度视频流
一.简要介绍 关于realsense的介绍,网上很多,这里不再赘述,sdk及相关文档可参考realsense SDK,也可参考开发人员专区. 运行代码之前,要确保你已经安装好了realsense的DC ...
- Realsense 人脸识别
一.代码声明 下面的代码是博主参考了Intel realsense官方SDK和官方例程后写的一段较为简单的代码,实现了简单的多人脸实时检测及跟踪功能.官方的人脸检测例程功能较多,但代码量很大,阅读起来 ...
随机推荐
- Docker容器编排器概览
就像Apple推出iPhone让智能手机变成主流,Docker让容器变成了主流.自从项目发布以来,Docker着重于提升开发者的体验.基本理念是可以在整个行业中,在一个标准的框架上,构建.交付并且运行 ...
- cookie控制登陆时间
使用cookie实现永久登陆 1,在cookie里面保存账号密码然后和数据库核对(由于我没有使用数据库,就不用了 2,在cookie里面保存时间戳和账号使用加密解密(我也没有使用时间戳 思路,requ ...
- How to install torcs package in Debian
Installation instructions Installing torcs package in Debian Wheezy is as easy as running: 没想到在debia ...
- php mysql apache 的字符集
在使用中常常遇到utf-8和utf8,现在终于弄明白他们的使用不同之处了,现在来和大家分享一下,下面我们看一下utf8 和 UTF-8 有什么区别 “UTF-8”是标准写法,php在Windows下边 ...
- Epel源配置
CentOS6的请编辑/etc/yum.repos.d/epel.repo输入以下内容 [epel] name=Extra Packages for Enterprise Linux 6 - $bas ...
- SQL Server数据库常用的T-SQL命令
1. 查看数据库的版本 select @@version 2.查看数据库所在机器操作系统参数 exec master..xp_msver 3. 查看数据库启动的参数 sp_configure 4.查看 ...
- Maven和Gradle的比较
Gradle和Maven都是项目构建工具,但是完全是两个产品,maven应该目前在java企业级开发中占的比重比较大,Gradle是后起之秀,Google的Android Stadio主推的就是Gra ...
- 记录关于ubuntu无线上网只能ping通5~7个数据包的问题
问题是这样的,我的笔记本(ubuntu desktop)连接上wifi后,信号很好,但是上网上不了,ping网关也不通,ping外网仅仅只有当笔记本刚刚连接上wifi的时候能ping通5至6个包,然后 ...
- 打开图片并显示在面板上demo
import java.awt.EventQueue; import java.awt.event.ActionEvent; import java.awt.event.ActionListener; ...
- OD 实验(十二) - 对一个 Delphi 程序的逆向
程序: 运行程序 界面显示的是未注册 点击 Help -> About 点击 Use Reg Key 这里输入注册码 用 PEiD 看一下 该程序是用 Delphi 6.0 - 7.0 写的 逆 ...