实时系统Preempt RT与Xenomai之争!谁更主流,谁更实时?

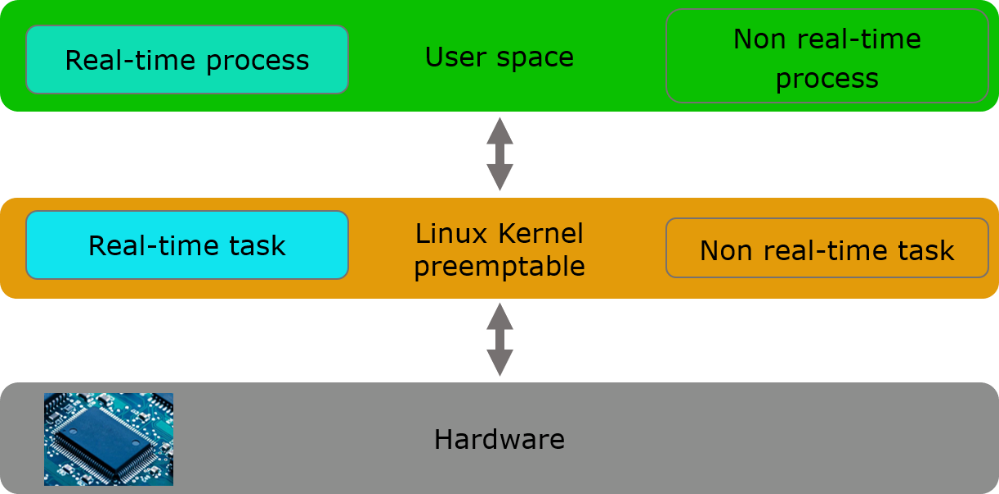
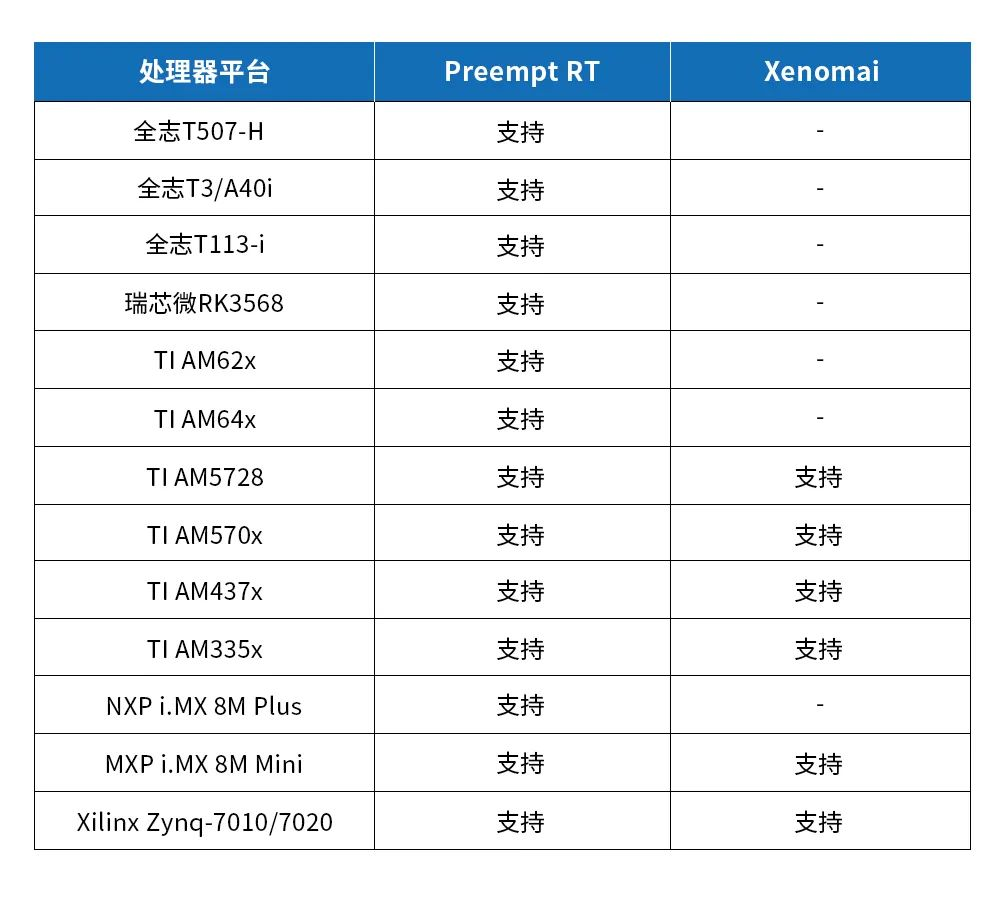
图 3 创龙科技Linux实时系统平台支持列举
版权声明:本文主要内容基于“北京盟通科技有限公司”授权提供的文件,由“创龙科技”进行整理得出。感谢“盟通科技”的慷慨支持,让更多人了解Linux系统的“实时拓展”选择知识。
实时系统Preempt RT与Xenomai之争!谁更主流,谁更实时?的更多相关文章
- Vxworks、QNX、Xenomai、Intime、Sylixos、Ucos等实时操作系统的性能特点
Vxworks.QNX.Xenomai.Intime.Sylixos.Ucos等实时操作系统的性能特点 VxWorks操作系统 VxWorks 操作系统是美国WindRiver公司于1983年设计开发 ...
- xenomai内核解析之xenomai的组成结构
@ 目录 一.xenomai 3 二.xenomai3 结构 这是第二篇笔记. 一.xenomai 3 从xenomai3开始支持两种方式构建linux实时系统,分别是cobalt 和 mercury ...
- xenomai内核解析之嵌入式实时linux概述
Linux系统作为一个GPOS(通用操作系统)发展至今已经非常成熟可靠了,并且由于遵循GPL协议,开放所有系统源代码,非常易于裁剪.更重要的是,与其他开源的GPOS或RTOS相比,Linux系统支持多 ...
- 基于Xenomai的实时Linux分析与研究
转自:http://blog.csdn.net/cyberlabs/article/details/6967192 引 言 随着嵌入式设备的快速发展,嵌入式设备的功能和灵活性要求越来越高,很多嵌入式设 ...
- xenomai安装
一.Linux内核打实时补丁 1.将下载的Linux和xenomai安装包放在/usr/src目录下,并解压文件包,命令如下 tar xjf Linux-3.8.13.tar.bz2 tar x ...
- 【原创】有利于提高xenomai 实时性的一些配置建议
版权声明:本文为本文为博主原创文章,转载请注明出处.如有错误,欢迎指正. @ 目录 一.影响因素 1.硬件 2.BISO(X86平台) 3.软件 4. 缓存使用策略与GPU 二.优化措施 1. BIO ...
- 【原创】xenomai与VxWorks实时性对比(Jitter对比)
版权声明:本文为本文为博主原创文章,转载请注明出处.如有问题,欢迎指正.博客地址:https://www.cnblogs.com/wsg1100/ (下面数据,仅供个人参考) 可能大部分人一直好奇Vx ...
- 从.NET和Java之争谈IT这个行业
一.有些事情难以回头 开篇我得表名自己的立场:.NET JAVA同时使用者,但更加偏爱.NET.原因很简单 1.NET语言更具开放性,从开源协议和规范可以看出; 2.语言更具优势严谨; 3.开发工具V ...
- 从.NET和Java之争谈IT这个行业[转]
一.有些事情难以回头 开篇我得表名自己的立场:.NET JAVA同时使用者,但更加偏爱.NET.原因很简单 1.NET语言更具开放性,从开源协议和规范可以看出; 2.语言更具优势严谨; 3.开发工具V ...
- 从. NET 和 Java 之争谈 IT 这个行业
一.有些事情难以回头 开篇我得表名自己的立场:.NET JAVA 同时使用者, 但更加偏爱. NET. 原因很简单 NET 语言更具开放性, 从开源协议和规范可以看出; 语言更具优势严谨; 开发工具 ...
随机推荐
- 用 Certbot-auto 在 letsencrypt.org申请免费 SSL 证书实现 HTTPS
参考帖子 https://www.cnblogs.com/lzpong/p/6433189.html https://www.cnblogs.com/756623607-zhang/p/1163850 ...
- 用 C 语言开发一门编程语言 — 字符串与文件加载
目录 文章目录 目录 前文列表 字符串 读取字符串 注释 文件加载函数 命令行参数 打印函数 报错函数 源代码 前文列表 <用 C 语言开发一门编程语言 - 交互式解析器> <用 C ...
- 服务器电源管理(Power Management States)
目录 文章目录 目录 EIST(智能降频技术) 硬件 固件 操作系统 EIST(智能降频技术) EIST 能够根据不同的 OS(操作系统)工作量自动调节 CPU 的电压和频率,以减少耗电量和发热量.它 ...
- 基于FPGA的电子琴设计(按键和蜂鸣器)----第一版
欢迎各位朋友关注"郝旭帅电子设计团队",本篇为各位朋友介绍基于FPGA的电子琴设计(按键和蜂鸣器)----第一版. 功能说明: 外部输入七个按键,分别对应音符的"1.2. ...
- Metabase 安装和使用教程
Metabase 是一款开源的数据分析和商业智能工具,允许企业用户在几分钟内搭建起一个功能完善的数据探索和数据分析平台,不需要编写复杂的 SQL 查询语句或者使用专业的数据可视化工具,就可以轻松地探索 ...
- AIRIOT训练营沈阳站圆满结束|手把手教你搞定物联网应用开发
8月28日-9月1日,由航天科技控股集团有限公司(以下简称"航天科技")主办的<AIRIOT物联网平台应用与实战>训练营在沈阳圆满结束,来自上海电机学院.中渝软通信息技 ...
- 全网首一份!你最需要的PPTP MS-CHAP V2 挑战响应编程模拟计算教程!代码基于RFC2759,附全部源码!
本文基于网络密码课上的实验 本来想水一水就过去,代码就网上找找,不行就GPT写,但是!一份都找不到,找到的代码都是跑不了的,总会是就是乱七八糟.所以准备认真的写一份. 代码编译成功的前提是要预先装好o ...
- linux 文件扩展权限ACL(访问控制列表)
目录 一.关于文件扩展权限ACL 二.给文件加扩展权限 三.给目录加扩展权限 四.给目录下所有文件都加扩展权限 五.去掉单个acl权限 六.去掉所有acl权限 一.关于文件扩展权限ACL 在linux ...
- synchronized锁升级过程
更过博文请关注:https://blog.bigcoder.cn JDK 1.6后锁的状态总共有四种,级别由低到高依次为:无锁.偏向锁.轻量级锁.重量级锁,这四种锁状态分别代表什么,为什么会有锁升级? ...
- 一文详解编辑距离(Levenshtein Distance)
更多博文请关注:https://blog.bigcoder.cn 一. 什么是Levenshtein Distance Levenshtein Distance,一般称为编辑距离(Edit Dista ...