测距技术 超声波、毫米波、激光雷达LIDAR
超声波
技术成熟,成本之选
声波传输慢,高速时误差大
超声波雷达有40kHz、48kHz和58kHz三种,频率越高,灵敏度越高,探测角度越小。在工作状态,通过收发超声波,超声波雷达能以1-3cm精度测算0.2-5m范围内的障碍物。然而,由于工作频率属于声波范围,超声波雷达的不足也是显而易见的。尤其是汽车在高速行驶过程中,由于超声波信号的传播延迟,接收到的信息会出现一定的延迟。另外,超声波设备也存在方向性差的问题,需要更多的设备来覆盖同一个区域,而且天气条件也会极大地影响它们的探测效果。
为什么天气有影响?
应该是说天气变化大影响传播速度
1、优势:超声波的能量消耗较缓慢,在介质中传播的距离比较远,穿透性强,测距的方法简单,成本低。
2、劣势:超声波雷达在速度很高情况下测量距离有一定的局限性,这是因为超声波的传输速度很容易受天气情况的影响,在不同的天气情况下,超声波的传输速度不同,而且传播速度较慢,当汽车高速行驶时,使用超声波测距无法跟上汽车的车距实时变化,误差较大。另一方面,超声波散射角大,方向性较差,在测量较远距离的目标时,其回波信号会比较弱,影响测量精度。但是,在短距离测量中,超声波测距传感器具有非常大的优势。
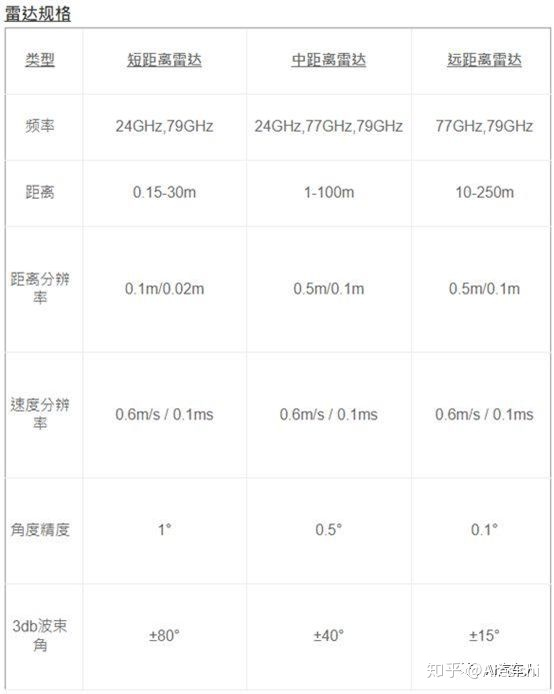
毫米波
向77-79GHz迈进
相比激光雷达的复杂反射镜和激光器,毫米波雷达的装置要简单多了,但它的信号传输速度比超声波更快、更精确。毫米波雷达通常工作在24GHz和77-79GHz,基本不受热或光等环境因素的影响。毫米波天线也比超声波天线小得多,功率更低,很容易与车辆设计融为一体。另外,它们可以调整为短、长、宽或窄的探测范围,以满足特定应用的需要。传统的24 GHz窄带汽车雷达在区分物体和区分人、狗、其他汽车等方面有一定的局限性。目前,以24GHz窄带传感器为主流的汽车雷达传感技术正朝着76-81GHz频段、调频连续波(FMCW)和波束成形天线的方向快速发展。其中,76GHz用于远程检测,77-81GHz频段用于短距离、高精度检测。我们知道,距离测量误差和最小可分辨距离与带宽成反比。
从24GHz过渡到79GHz,在距离分辨率和精确度方面的性能可提高近20倍。也就是说,24GHz系统的距离分辨率为75cm,将其换成79GHz系统,那么分辨率就将达到4cm,能够更好地检测相邻的多个物体。同样,在波长较小的情况下,速度测量的分辨率和精度也将成比例的提高。采用79GHz雷达系统的另一个优势是设备的尺寸和重量将大幅下降。由于79GHz信号的波长约为24GHz系统的三分之一,因此79GHz天线的总面积只相当于24GHz天线的九分之一。开发人员可以使用更小更轻的传感器,并且很容易将其隐藏起来,以获得更好的燃油经济性和汽车外形设计。可以说,76-81GHz毫米波雷达是一个面向未来的ADAS以及自动驾驶的传感技术。
激光雷达LIDAR
精度最高,光照强了不行,距离很难突破200m
激光雷达可以提供最精确的三维地图,并能扫描自动驾驶汽车周围的360度空间,范围可达100米左右。有些激光雷达系统甚至提供多达64个通道,每秒扫描超过100万个点。这些信息量可提供2厘米的高精度,以应对不断变化的环境。除了获得位置信息,激光信号的反射率还可以区分目标物质的材质。
但激光雷达会比较容易受到自然光或是热辐射的影响,在自然光强烈或是辐射区域的时候,激光雷达将会被消弱很多而且激光雷达的造价成本高,对工艺水平要求也比较高。而毫米波雷达而言,虽然抗干扰能力较强,但是距离和精确度确实硬伤,而且在行车环境下,处于多重波段并存的环境下对毫米波的影响是极大的。毫米波对于较远处的探测能力也是极为有限的。
简单来说,激光雷达精度更高,但价格昂贵。
但从探测距离和抗干扰性的方面来看,毫米波雷达的表现会更突出一些。由于波长的原因,毫米波雷达的探测距离可以轻松超过200米,而激光雷达一般不到150米,在高速行驶的场景里,毫米波雷达更适合。相比于激光雷达的抗干扰性受环境影响较大,在雾霾、雨雪等极端天气中,毫米波雷达的穿透雾、烟、灰尘的能力也要更强一些。
超声波雷达的优势在于短距离测量,超声波雷达受天气情况影响大、传播速度不稳定,且传播速度慢,车辆高速行驶上跟不上变化。不同温度情况下,测量的距离也不同,在测量较远距离的目标时,其回波信号会比较弱,无法精确描述障碍物的位置。
毫米波雷达的优势是测距离较远和速度识别,抗干扰能力强。这是因为毫米波雷达波束窄、角分辨力高、频带宽、隐蔽性好,与红外、激光设备相比较,具有对烟、尘、雨、雾良好的穿透传播特性,不受恶劣天气的影响,抗环境变化能力强。w

测距技术 超声波、毫米波、激光雷达LIDAR的更多相关文章
- 激光雷达Lidar与毫米波雷达Radar:自动驾驶的利弊
激光雷达Lidar与毫米波雷达Radar:自动驾驶的利弊 Lidar vs Radar: pros and cons for autonomous driving 新型无人驾驶汽车的数量在缓慢增加,各 ...
- 激光雷达lidar与点云数据
激光雷达lidar与点云数据 DEM是分布和显示数字地形的首个广泛使用的机制. 点云是在空间中随机放置的3D点的集合.传感器发出能量脉冲并乘以其返回行程(TWTT,双向行程时间).知道了传感器的位置以 ...
- 激光雷达Lidar Architecture and Lidar Design(上)
激光雷达Lidar Architecture and Lidar Design(上) 介绍 激光雷达结构: 基本条件 构型和基本布置 激光雷达设计: 基本思想和基本原则 总结 介绍 激光雷达结构是激光 ...
- 激光雷达Lidar Architecture and Lidar Design(下)
Considerations on Lidar Design 双基地还是单基地? 双轴还是同轴? 几何重叠 向上还是向下看? 关心分散还是只关心时间? 发射器和接收器的波长 是否可调? 发射器和接收器 ...
- 毫米波RADAR与LIDAR探秘
毫米波RADAR与LIDAR探秘 说起激光雷达和毫米波雷达,相信业内人士并不陌生,激光雷达是以发射激光束探测目标的位置.速度等特征量的雷达系统.而毫米波雷达是指工作在毫米波波段探测的雷达.毫米波实质上 ...
- 机载LIDAR技术及其应用
1 机载LIDAR的系统组成及原理 1.1 机载 LIDAR 技术的发展历程 LIDAR 技术和机载激光扫描技术的发展源自 1970 年,美国航空航天局(NASA)支持研制成功第一台对地观测 LIDA ...
- stm32与HC-SR04超声波传感器测距
首先,先来看一下这个模块的基本功能和原理. HC-SR04超声波测距模块可提供2cm-400cm的非接触式距离感测功能,测距精度可达高到3mm:模块包括超声波发射器.接收器与控制电路.像智能小车的测距 ...
- STM32—驱动HC-SR04超声波测距模块
文章目录 超声波测距原理 HC-SR04工作原理 STM32实现驱动 1.引脚的配置 2.时序控制 3.时间差测量 4.如何将距离测出来 超声波测距原理 利用HC-SR04超声波测距模块可以实现比较精 ...
- 4D雷达成像技术
4D雷达成像技术 当我们谈及3D捕捉时,总是先想到光学传感器.当我们讨论在第四维度(时间)讨论视觉数据时,倾向于考虑场景数据调度.这些是我们多年来关注激光雷达(LiDAR)和摄影测量,以及用户针对缓慢 ...
- ADAS超声波雷达
ADAS超声波雷达 在倒车入库,慢慢挪动车子的过程中,在驾驶室内能听到"滴滴滴"的声音,这些声音就是根据超声波雷达的检测距离给司机的反馈信息. 倒车雷达系统,英文全称为REVERS ...
随机推荐
- Django详细笔记
django 学习 特点 快速开发 安全性高 可伸缩性强 URL 组成部分 URL: 同意资源定位符 一个URL由以下几部分组成 scheme://host:port/path/?query-stri ...
- linux 查看端口状态
查看端口 netstat -tlun 查看端口被那个服务占用 netstat -tunlp |grep 8080
- 一套基于 Ant Design 和 Blazor 的开源企业级组件库
前言 今天大姚给大家分享一套基于Ant Design和Blazor的开源(MIT License).免费的企业级组件库(喜欢Ant Design风格的同学推荐使用):Ant Design Blazor ...
- Pluto 轻松构建云应用:开发指南
开发者只需在代码中定义一些变量,Pluto 就能基于这些变量自动创建与管理必要的云资源组件,达到简化部署和管理云基础设施的目的,让开发者更容易使用云. 这里的云资源并非指 IaaS,而是指 BaaS. ...
- windows内置账户
参考文献: http://www.cnblogs.com/xianspace/archive/2009/04/05/1429835.html 转载自: https://www.cnblogs.com/ ...
- linux系统&自动清理日志实现脚本
文章来源:https://blog.csdn.net/lakelise/article/details/93711932 编写清理脚本,添加到定时任务中:创建可执行文件cd /hometouch cl ...
- oeasy教您玩转vim - 45 - # 按行编辑
按行编辑 回忆上节课内容 上次我们主要就是综合运用 很好玩的,更快速的解决问题 进行计算 ctrl+a,将具体的数字加1 ctrl+x,将具体的数字减1 5ctrl+a,将具体的数字加5 一次命令 ...
- 如何通过minIO在后端实现断点续传
首先是黑马的媒资管理模块流程图:前端负责计算媒资文件的MD5值,同时对媒资文件进行分块. 后端需要以下几个接口: 1.检查分块是否存在(传入参数为视频唯一标识信息与块信息):检查当前分块是否已经上传至 ...
- RPC接口测试(六)RPC协议解析(重要!重要!重要!)
RPC协议解析 RPC(Remote Procedure Call Protocol)远程过程调用协议,它是一种通过网络从远程计算机程序上请求服务,而不需要了解底层网络技术的协议.简言之,RPC使得程 ...
- 【Java】暂存逻辑
需求说明: 需求是填写一个表单时暂时保存输入项,不提交表单 回来再次填写时可以恢复或者放弃,或者更改内容继续暂存 放两张UI图,一个移动端,一个手机端: 逻辑分析: 存储方式有这么几种,Cookie存 ...